
一.控制要求:
(1)有兩臺水泵,按設(shè)計要求一臺運行,一臺備用,自動運行時泵運行累計100H輪換一次,手動時不切換;
(2)兩臺水泵分別由M1、M2電動機拖動,電動機同步轉(zhuǎn)速為3000轉(zhuǎn)/min,由KM1、KM2控制;
(3)切換后起動和停電后起動須5s報警,運行異常可自動切換到備用泵,并報警;
(4)采用PLC的PID調(diào)節(jié)指令
(5)變頻器(使用三菱FR-A540)采用PLC的特殊功能單元FX0N-3A的模擬輸出,調(diào)節(jié)電動機的轉(zhuǎn)速;
(6)水壓在0~10kg可調(diào),通過觸摸屏(使用三菱F940)輸入調(diào)節(jié);
(7)觸摸屏可以顯示設(shè)定水壓、實際水壓、水泵的運行時間、轉(zhuǎn)速、報警信號等;
(8)變頻器的其余參數(shù)自行設(shè)定。
二.軟件設(shè)計:
1.I/O分配
(1)觸摸屏輸入,M500:自動起動;M100:手動1號泵;M101:手動2號泵;M102:停止;M103:運行時間復(fù)位;M104:清除報警;D300:水壓設(shè)定。
(2)觸摸屏輸出,Y0:1號泵運行指示;Y1:2號泵運行指示,T20:1號泵故障;T21:2號泵故障;D101:當(dāng)前水壓;D502:泵累計運行的時間;D102:電動機的轉(zhuǎn)速。
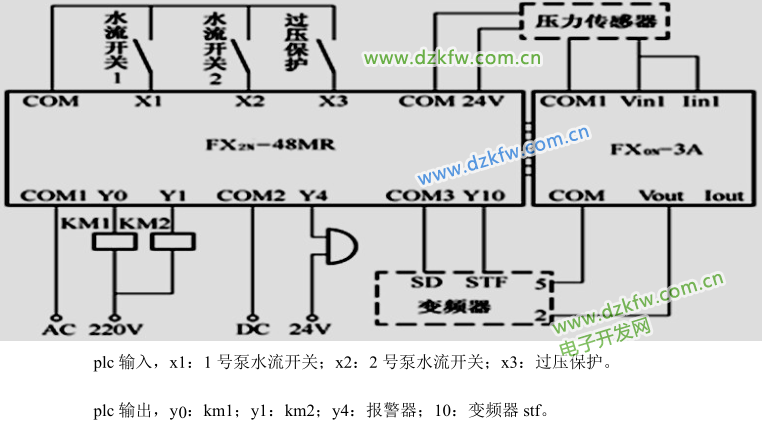
(3)PLC輸入,X1:1號泵水流開關(guān);X2:2號泵水流開關(guān);X3:過壓保護。
(4)PLC輸出,Y1:KM1;Y2:KM2;Y4:報警器;10:變頻器STF。
2.觸摸屏畫面設(shè):
根據(jù)控制要求及I/O分配,按下圖1-1制作觸摸屏畫面。
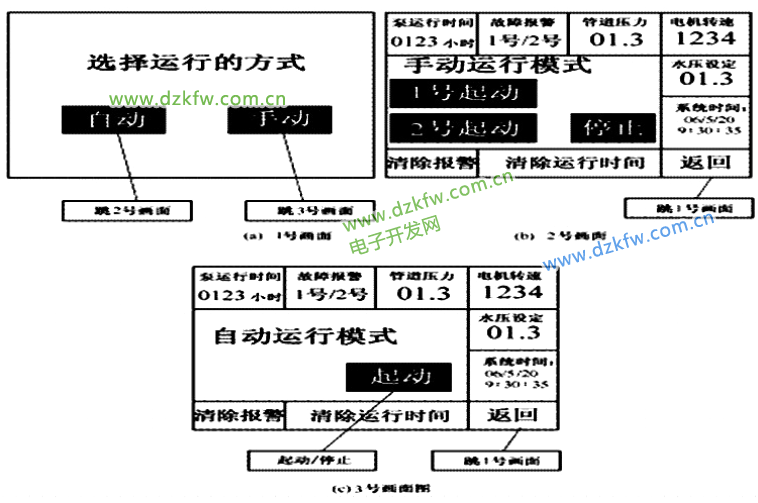
(三菱F940觸摸屏的畫面制作圖1-1)
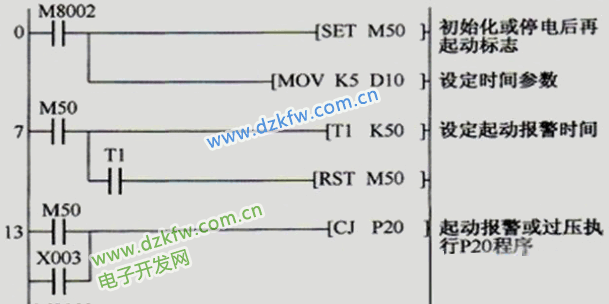
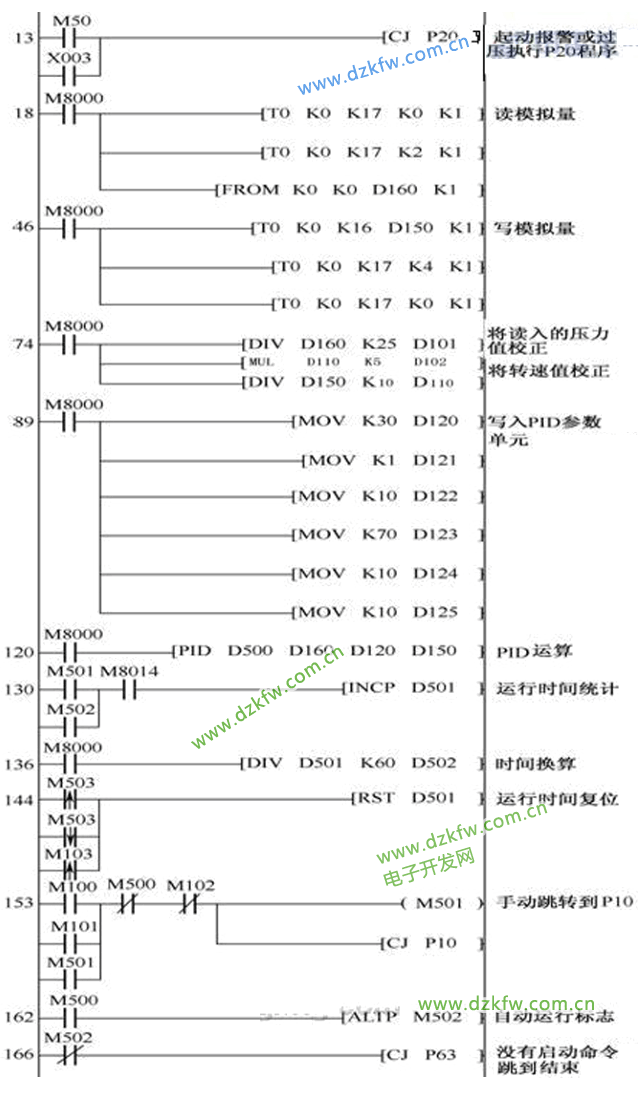
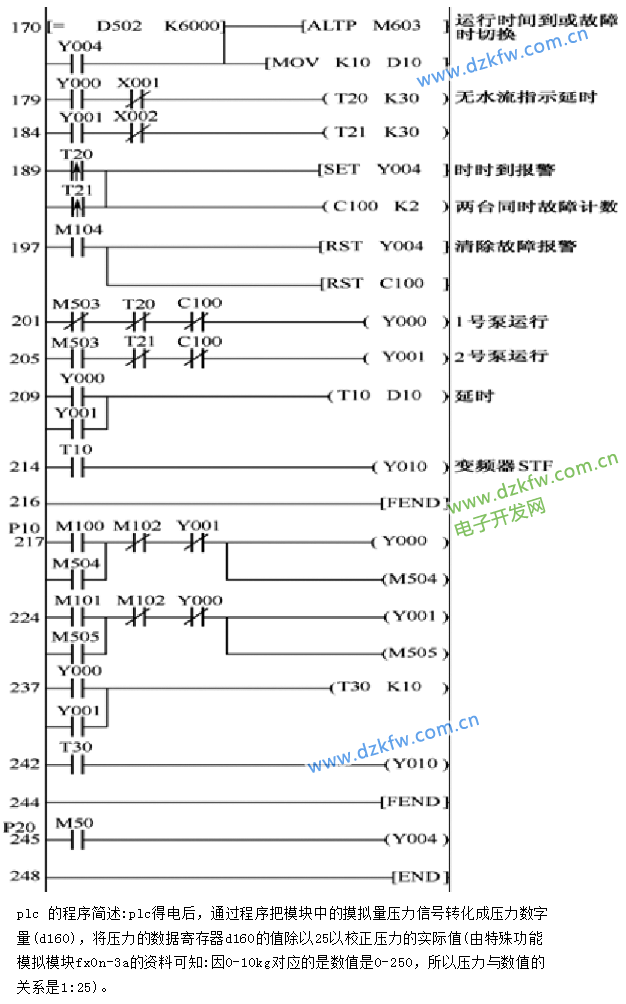
3.PLC的程序:
(1).根據(jù)控制要求,PLC程序如下圖2-1,3-1所示。
(PLCFX2N-48MR的程序梯形圖圖3-1)
(2).PLC的關(guān)鍵性程序結(jié)構(gòu)簡述:
PLC得電后,通過程序把模塊中的摸擬量壓力信號轉(zhuǎn)化成壓力數(shù)字量(D160),將壓力的數(shù)據(jù)寄存器D160的值除以25以校正壓力的實際值(由特殊功能模擬模塊FX0N-3A的資料可知:因0—10kg對應(yīng)的是數(shù)值是0—250,所以壓力與數(shù)值的關(guān)系是1:25)。
在該系統(tǒng)中我們規(guī)定了電動機同步轉(zhuǎn)速為3000轉(zhuǎn)/min,所以同步轉(zhuǎn)速的設(shè)定低于3000轉(zhuǎn)/min對電機的保護是有好處的,這里我們把轉(zhuǎn)速設(shè)定為不能超過1250轉(zhuǎn)/min,則數(shù)值與通過PID程序運算的MV(輸出)值D150(即電動機轉(zhuǎn)速量)的關(guān)系為1:5(由特殊功能模擬模塊FX0N-3A的資料可知: 因數(shù)值是0—250對應(yīng)的是0—1250轉(zhuǎn)/min,則數(shù)值與轉(zhuǎn)速的關(guān)系是1:5),所以電動機的轉(zhuǎn)速實際值校正數(shù)D102=D150×5÷10(其中除以10是因為所有實數(shù)參與PID的SV<設(shè)定值>D500,PV<當(dāng)前值>D160,運算都是以1000%加入的。所以要得到MV<輸出值>D150的實際 數(shù)值需要除以10)。
因該系統(tǒng)中電機的轉(zhuǎn)速是與壓力成正比的,轉(zhuǎn)速加大;壓力也加大!(這里要注意:動作方向【S3】+1,當(dāng)前值PV,D500<設(shè)定值sv,d160;即bit=1,選擇逆動作)所以將壓力數(shù)字量寄存器d160用于pid< span="">程序的PV(當(dāng)前)數(shù)字量做為時刻檢查管內(nèi)的當(dāng)前壓力狀況。
4.變頻器設(shè)置:
(1)上限頻率Pr1=50Hz;(2)下限頻率Pr2=30Hz;(3)基底頻率Pr3=50Hz;(4)加速時間Pr7=3s;(5)減速時間Pr8=3s;(6)電子過電流保護Pr9=電動機的額定電流;(7)起動頻率Pr13=10Hz;(8)DU面板的第三監(jiān)視功能為變頻繁器的輸出功率Pr5=14;(9)智能模式選擇為節(jié)能模式Pr60=4;(10)設(shè)定端子2~5間的頻率設(shè)定為電壓信號0~10V Pr73=0;(11)允許所有參數(shù)的讀/寫Pr160=0;(12)操作模式選擇(外部運行)Pr79=2;(13)其他設(shè)置為默認值。
三、系統(tǒng)接線:
根據(jù)控制要求及I/O分配,其系統(tǒng)接線圖如圖4-1所示。
(PLCFX2N-48MR系統(tǒng)接線圖如圖4-1)
四、系統(tǒng)調(diào)試:
(1)將觸摸屏RS232接口與計算機連接,將觸摸屏RS422接口與PLC編程接口連接,編寫好FX0N-3A偏移/增益調(diào)整程序,連接好FX0N-3A I/O電路,通過GAIN和OFFSET調(diào)整偏移/增益。
(2)按圖1-1設(shè)計好觸摸屏畫面,并設(shè)置好各控件的屬性,按圖2-1,3-1所示編寫好PLC程序,并傳送到觸摸屏和PLC。
(3)將PLC運行開關(guān)保持OFF,程序設(shè)定為監(jiān)視狀態(tài),按觸摸屏上的按鈕,觀察程序觸點動作情況,如動作不正確,檢查觸摸屏屬性設(shè)置和程序是否對應(yīng)。
(4)系統(tǒng)時間應(yīng)正確顯示。
(5)改變觸摸屏輸入寄存器值,觀察程序?qū)?yīng)寄存器的值變化。
(6)按(圖4-1)連接好PLC的I/O線路和變頻器的控制電路及主電路。
(7)將PLC運行開關(guān)保持ON,設(shè)定水壓調(diào)整為3kg。
(8)按手動起動,設(shè)備應(yīng)正常起動,觀察各設(shè)備運行是否正常,變頻器輸出頻率是否相對平穩(wěn),實際水壓與設(shè)定的偏差。
(9)如果水壓在設(shè)定值上下有劇烈的抖動,則應(yīng)該調(diào)節(jié)PID指令的微分參數(shù),將值設(shè)定小一些,同時適當(dāng)增加積分參數(shù)值。如果調(diào)整過于緩慢,水壓的上下偏差很大,則系統(tǒng)比例常數(shù)太大,應(yīng)適當(dāng)減小。
(10)測試其他功能,是否跟控制要求相符。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底