
背景介紹:
最近因項目需要,要使用PLC來獲取設備傾斜角度并發出報警,經仔細研究調研,PLC選擇了國產西門子的PLC,性價比更高。 
傳感器在市面上有多家可選,但要支持PLC的Modbus協議的廠家就不多了,而且我是工業環境下使用,對穩定性好,溫度漂移小的設備。綜合比較后,選用了維特智能的這款HWT905,這款使用的是工業級的傳感器芯片,帶溫度補償,磁場芯片選用了市面上最高精度的PNI磁場傳感器,抗干擾和穩定性極佳,算法上采用了卡爾曼濾波算法融合加速度計和陀螺儀、磁場的信息,能夠獲得更加精準的數據。
傳感器的主要參數性能如下
1、電壓:5V~36V
2、電流:<40mA
3、體積:55mm X 36.8mm X 24mm
4、測量維度:加速度:3維,角速度:3維,磁場:3維,角度:3維
5、量程:加速度:±6g,角速度:±2000°/s,角度±180°。
6、穩定性:加速度:0.01g,角速度0.05°/s。
7、測量誤差:X Y軸 0.05°,Z軸1°(磁場校準好,且沒有被磁場干擾)。
8、數據輸出內容:時間、加速度、角速度、角度、磁場。
9、數據輸出頻率0.2Hz~200Hz。
10、數據接口:串口(485電平,波特率支持4800、9600(默認)、19200、38400、57600、115200、230400、460800、921600)。
注意事項:
軟件STEP-7MicroWIN V4.0 SP9需要安裝在xp和win7系統上,安裝在win10會無法正常安裝,軟件會出現功能不全。
操作步驟:
1、將西門子plc下載線和電腦連接,接上電源,將plc的開關撥至stop。
2、打開軟件STEP-7MicroWIN V4.0 SP9,點擊通訊。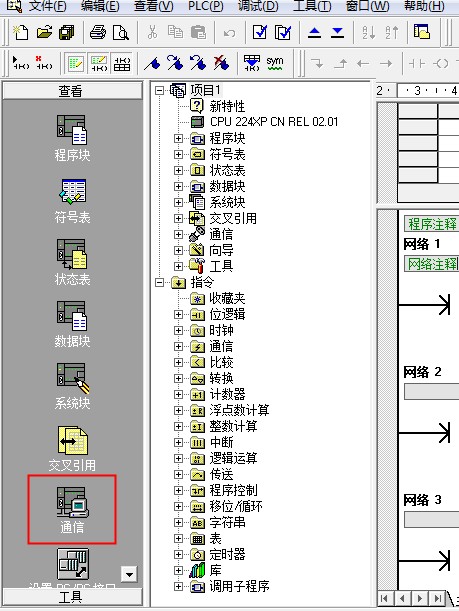
3、點擊設置PG/PC接口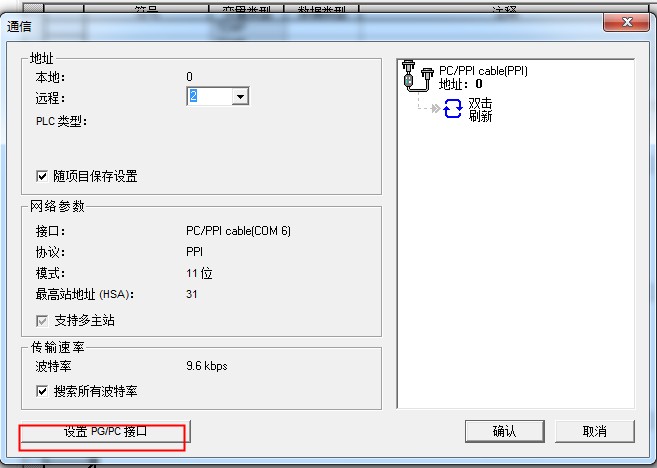
4、在PC/PPI cable(PPI)中,點擊“屬性”。
5、選擇正確的com串口,點擊“確認”。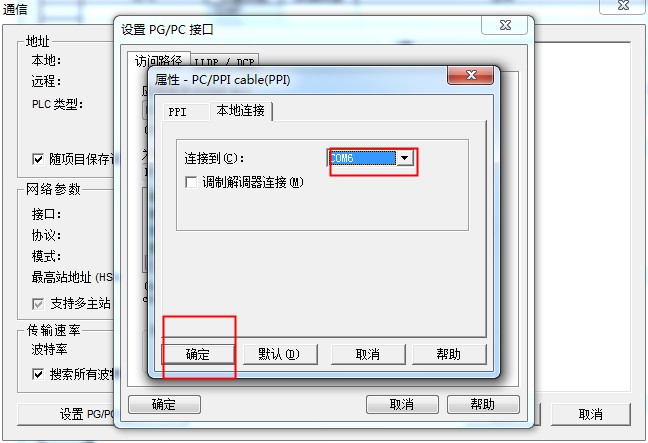
6、雙擊進行刷新。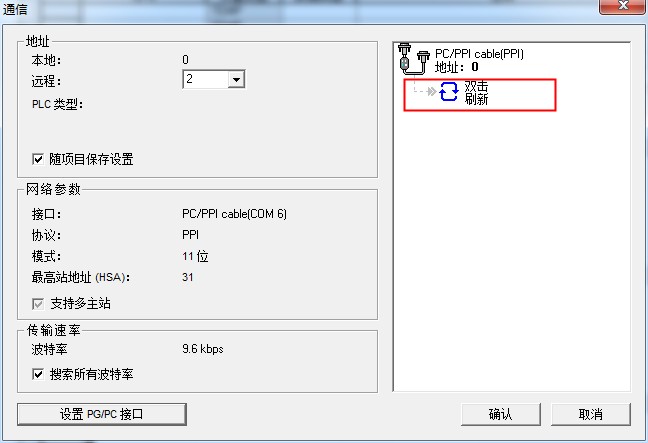
7、搜索到plc后,即可點擊“取消”,然后點擊“確認”。
8、安裝mudbus指令庫,解壓后,點擊“setup”安裝即可,指令庫可以在鏈接中下載。

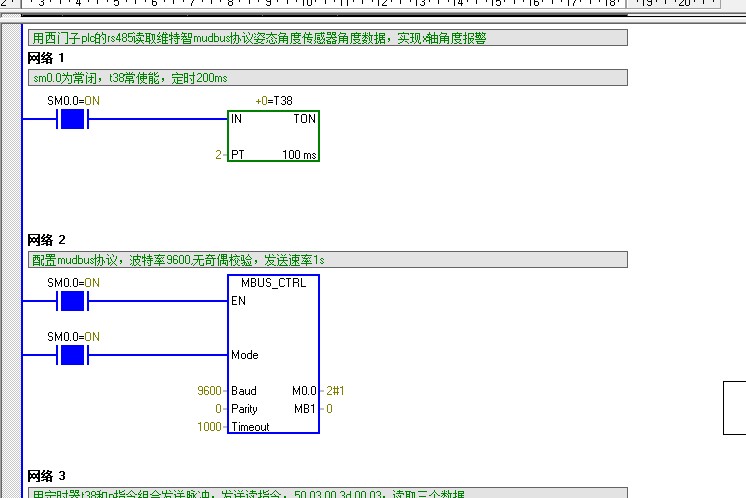
9、編寫程序,程序可以在鏈接中下載。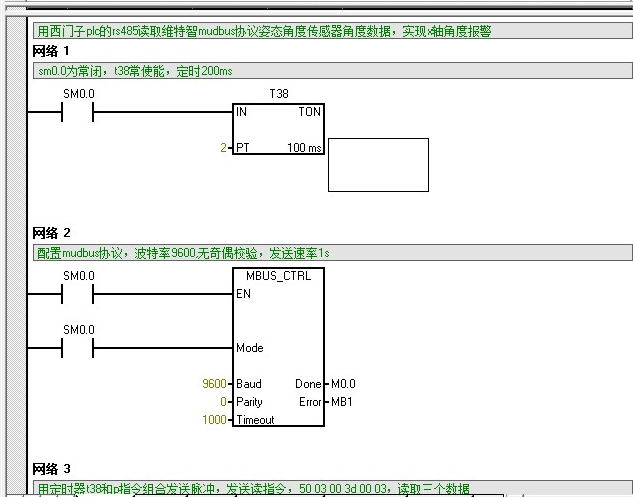
10、使用mudbus指令后,在程序塊中展開有“庫”,右擊“庫”,點擊“庫儲存區”,點擊“建議地址”,然后點擊“確認”即可。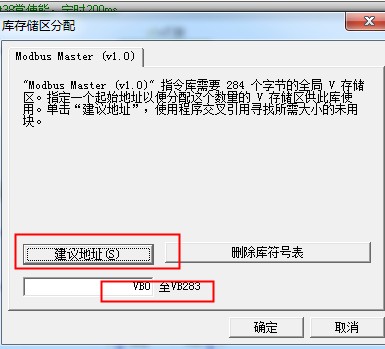
11、編譯程序,點擊“全部編譯”,可以看到沒有錯誤。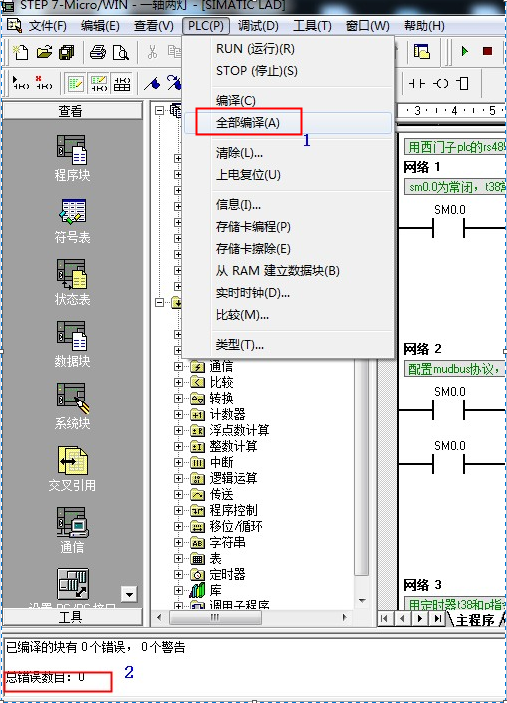
12、在文件中點擊“下載”。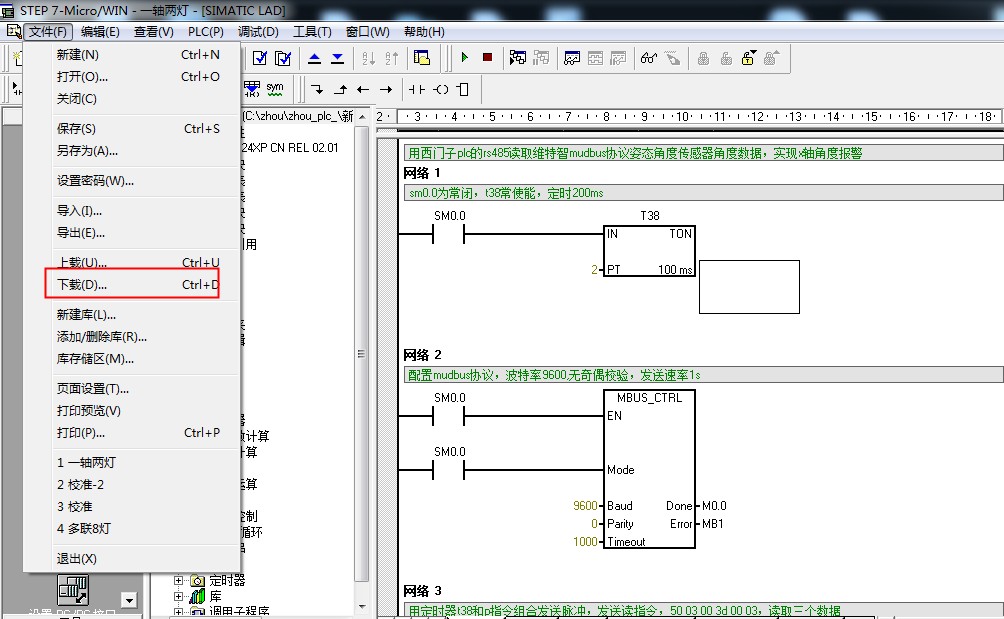
13、選擇好需要下載的內容,然后點擊“下載即可”。
14、點擊方框中的“運行”,即可遠程控制plc運行。
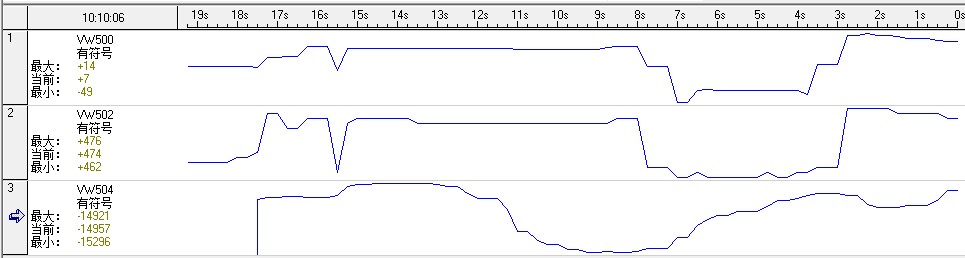
15、點擊方框中的監視按鈕,即可監視程序的運行狀況。
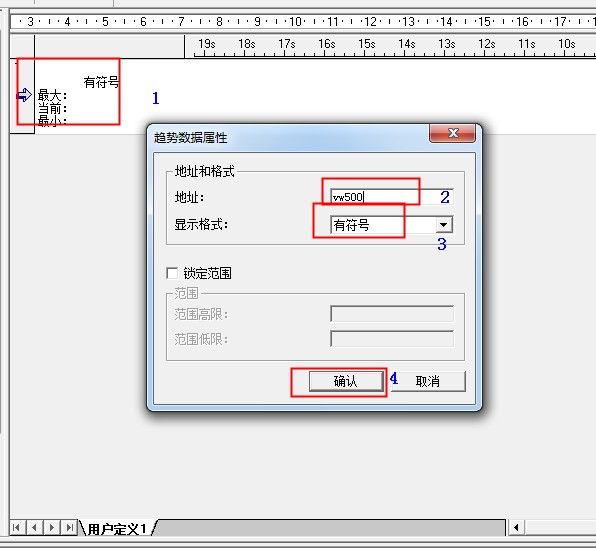
16、點擊“狀態表”,可監視查看相應儲存區的數據,雙擊可打開趨勢數據屬性,設置監視的內容。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底