
在PLC對各種工業、物流等生產流水線的控制中,常見的環節是對步進電動機的控制。步進電動機是一種用電脈沖進行控制、將電脈沖信號轉換為相應角位移或線位移的開環控制元件。正常情況下,電動機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,不受負載變化的影響,當步進電動機的驅動器接收到一個脈沖信號時,驅動電動機按照設定的方向旋轉一個固定的角度,即步距角。電動機的旋轉是以固定的角度逐步進行的,通過控制脈沖數量來控制角位移量,從而達到準確定位的目的。同時可以通過控制脈沖頻率來控制電動機轉動的速度和加速度,從而達到調速的目的。
就一個傳動速比確定的具體設備而言,無需距離、速度信號反饋環,只需控制脈沖的數量和頻率即可控制設備移動部件的移動距離和速度,而方向信號可控制移動的方向。另外,步進電機可以實現細分運轉方式。因此,盡管步進電機的步距角受機械制造的限制不能很小,但可以通過電氣控制的方式使步進電機的運轉由原來的每個整步細分成多個小步來完成,提高了設備運行的精度和平穩性。
對于那些在運行過程中移動距離和速度均確定的具體設備,采用PLC通過驅動器來控制步進電動機的運轉是一種理想的技術方案。本節以三相六拍步進電動機的控制為例,簡要介紹S7 -200系列PLC在步進電動機控制中的應用。
一、步進電動機的工作原理
三相步進電動機的結構原理示意圖如圖7-32所示,當A相繞組通直流電流時,根據電磁學原理,便會在AA方向產生磁場,在電磁力的作用下,吸引轉子,使轉子的齒與定子AA磁極上的齒對齊。若A相斷電、B相通電,這時新的磁場電磁力又吸引轉子的兩極與BB磁極齒對齊,轉子沿順時針轉過60°。通常,步進電動機繞組的通斷電狀態每改變一次,轉子轉過的角度角α稱為步距角。因此,圖7-32所示步進電動機的步距角α等于60°。若控制線路不停地按A→B→C→A…的順序控制步進電動機繞組的通斷電,步進電動機的轉子便不停地順時針轉動。若通電順序改為A→C→B→A…,同理,步進電動機的轉子將逆時針不停地轉動。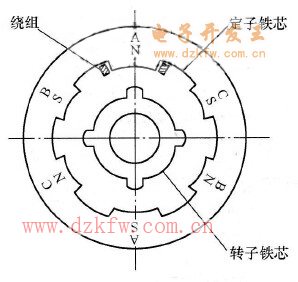
圖7-32 三相步進電動機的結構原理圖
若以三相六拍通電方式工作,當A相通電轉為A相和B相同時通電時,轉子的磁極將同時受到A相繞組產生的磁場和B相繞組產生的磁場的共同吸引,轉子的磁極只好停在A相和B兩相磁極之間,這時步距角α等于30°。當由A和B兩相同時通電轉為B相通電時,轉子磁極再沿順時針旋轉30°,與B相磁極對齊。其余以此類推,所以采用三相六拍通電方式,可使步距角α縮小一半。
在本節中,主要講述PLC對三相六拍步進電動機的控制。對三相六拍步進電動機的控制,主要有兩個方面,三相繞組的接通與斷開順序以及對步進速度的控制,其控制要求如下:
(1)按下正向啟動按鈕,步進電動機按A→AB→B→BC→C→CA→A的時序正向轉動。
(2)按下反向啟動按鈕,步進電動機按A→AC→C→CB→B→BA→A的時序反向轉動。
(3)運行過程中,正/反轉可不停地轉換。
(4)步進速度慢速為0.5s,快速為0.05s,并可隨時手動變速。
(5)每次啟動均從A相啟動。
二、步進電動機控制系統硬件設計
1.輸入/輸出信號分析
步進電動機PLC控制系統的硬件組成示意圖如圖7-33所示,由該組成示意圖可知,步進電動機PLC控制系統的輸入信號有:電動機正向、反向和停止按鈕各1個,控制其運行速度的按鈕1個,共有4路輸入信號,需4個輸入端子。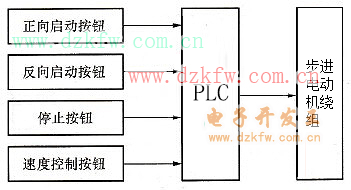
圖7-33 步進電動機控制系統的硬件組成示意圖
輸出信號:控制電動機三相繞組旋轉的3路信號,需3個輸出端子。
2.PLC的輸入/輸出分配表
根據步進電動機的工作原理以及相應的控制要求,結合圖7-33所示的硬件接線示意圖,可知該步進電動機控制系統中有4個數字輸入量和3個數字輸出量,可設計如表7-5所示的三相六拍步進電動機PLC控制的輸入輸出分配表。
表7-5 相六拍步進電動機PLC控制的輸入/輸出分配表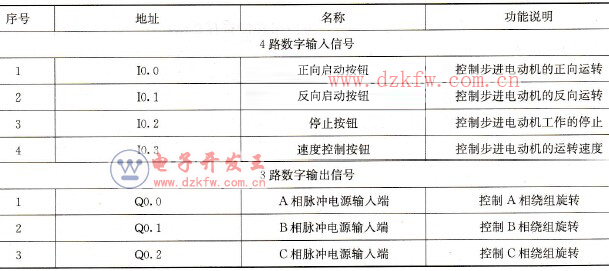
3.PLC的選型
根據表7-5中的輸入/輸出端子數,參考第2章表2-1 S7-200 CPU系列產品主要性能指標,本實例可以選用西門子公司S7-200系列PLC中的CPU221作為控制主機。
4.PLC的硬件接線圖
根據PLC的輸入/輸出分配情況,結合圖7-33所示的PLC控制系統硬件組成示意圖,可以畫出如圖7-34所示的PLC主機的硬件接線圖。
三、步進電動機控制系統軟件設計
根據具體的控制要求,可以畫出步進電動機控制系統的流程圖,如圖7-35所示。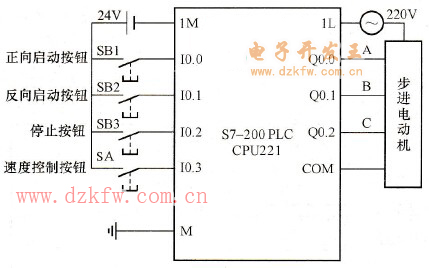
圖7-34 步進電動機PLC主機的硬件接線圖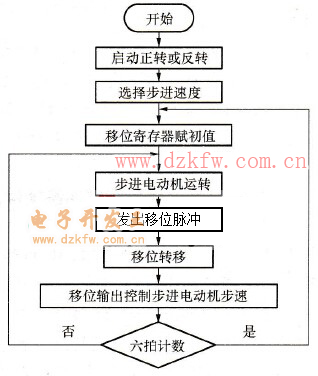
圖7-35 步進電動機控制系統的流程圖
在本例中,采用移位指令進行步進控制。首先指定移位寄存器MB0,按照三相六拍的步進順序,移位寄存器每左移一位,電動機前進一個步距角,完成六拍后重新賦初值。移位寄存器的初值如表7-6所示。
表7-6 移位寄存器初值
其中,M0.6和M0.7始終為“0”,據此,可做出移位寄存器輸出狀態及步進電動機繞組的狀態真值表,如表7-7所示。
表7-7 移位寄存器輸出狀態及步進電動機繞組的狀態真值表

以正轉為例對表7-7中數據進行解釋。初始狀態時,移位寄存器位M0.0~M0.5均為0,步進電動機三相繞組狀態均為0。當第一個脈沖到達后,M0.0位為1,步進電動機轉動一個步距角,A相繞組通電,即A相繞組狀態為1,其余兩相繞組狀態仍為0。當第二個脈沖到達時,M0.1位為1,A相通電轉為A相和B相同時通電,轉子的磁極停在A和B兩相磁極之間,所以此時A相和B相繞組狀態均為1,C相繞組狀態仍為0。當第三個脈沖到達時,M0.2位為1,步進電機再次轉過一個步距角,此時B相繞組通電,B相繞組狀態為1,A相和C相狀態為0。當第四個脈沖到達時,M0.3位為1,步進電機再次轉過一個步距角,此時B相和C相繞組通電,B、C相繞組狀態為1,A相狀態為0。當第5個脈沖到達時,M0.4位為1,步進電機再次轉過一個步距角,C相繞組通電,C相狀態為1,A、B相狀態為0。當第六個脈沖到達時,M0.5位為1,A相和C相繞組同時通電,A相、C相狀態為1,B相狀態為0。至此步進電機完成一個周期的運轉,當下一個脈沖達到時,步進電機重復上述的過程。反向運動時各相繞組的狀態可進行類似的分析。
步進電動機控制系統的PLC程序的梯形圖以及語句表如圖7-36所示。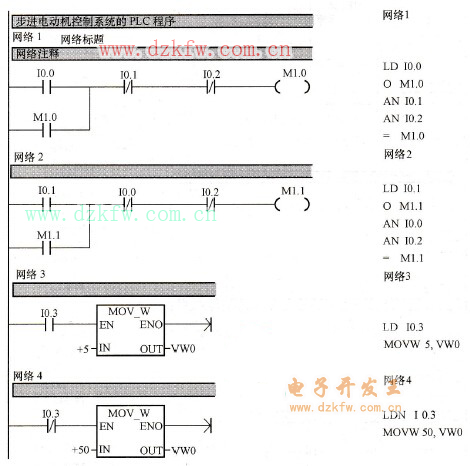
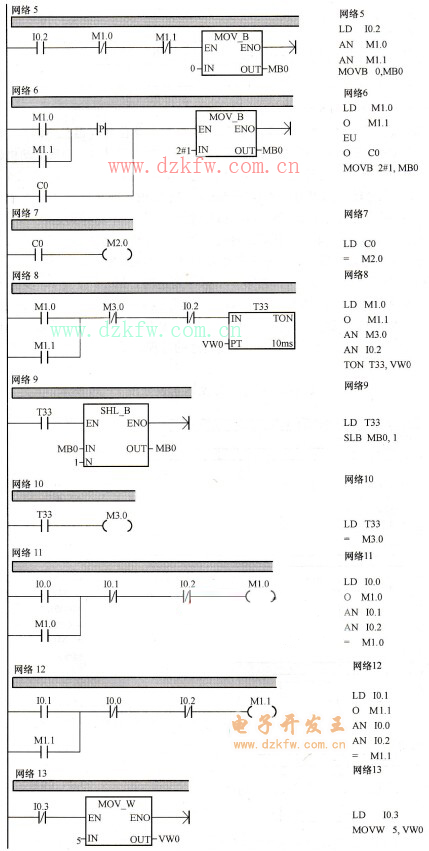
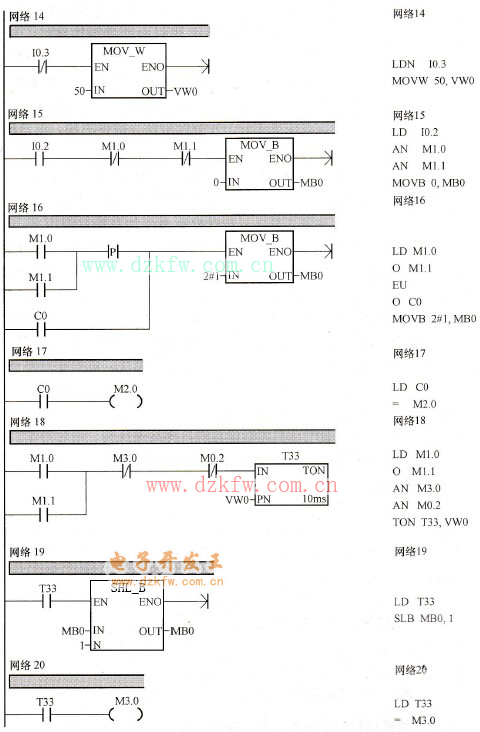
圖7-36 步進電動機控制系統的PLC程序梯形圖及語句表
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底