
這一篇文章就介紹一下順序控制設計法吧!在講順序控制設計法之前,我們先了解一下!
什么是順序控制?
如果一個控制系統可以分解成若干個獨立的控制動作,且這些動作必須按照一定的先后順序執行才能保證生產過程的正常運行,這樣的控制系統就稱為是順序控制系統。
比如說在機械行業,典型的機械手控制就可以利用順序控制的方法來實現控制。
我們所說的順序控制設計法,就是針對順序控制系統的一種專門的設計方法,我們以西門子S7-200 SMART PLC為例介紹一下!
我們可以采用三種程序編寫方法實現控制系統要求,包括使用邏輯指令、使用置位/復位指令、使用SCR/SCRT/SCRE指令,這些方法都可以設計出順序功能圖及其對應的梯形圖程序。
我們以沖床動力頭進給運動控制為例來介紹一下采用以上三種方法的編程。
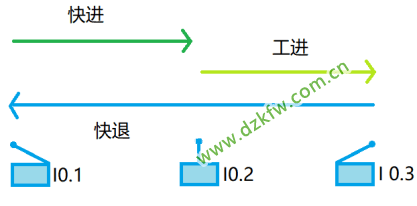
控制要求:某專用沖床動力頭的進給運動一個周期包括快進、工進和快退3步,動力頭的初始狀態停留在最左邊,限位開關I0.1狀態為1,啟動按鈕為I0.0,Q0.0~Q0.2控制3個電磁閥依次控制快進、工進和快退3步。
按下啟動按鈕,動力頭的運動如圖所示,工作一個循環后,動力頭返回并停留在初始位置。
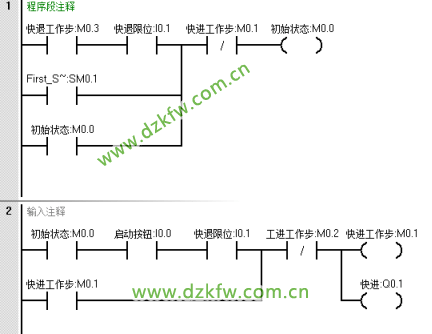
一、使用邏輯指令實現
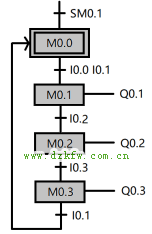
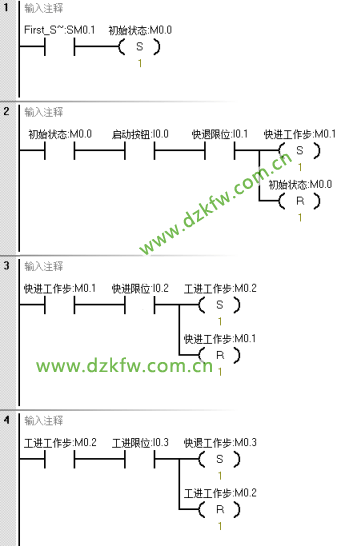
首先根據控制要求畫出順序功能圖,M0.0是初始狀態,M0.1是快進工作狀態步,M0.2是工進工作狀態步,M0.3是快退工作狀態步。
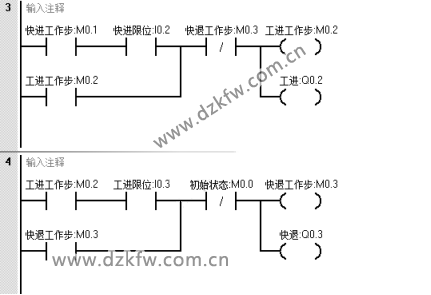
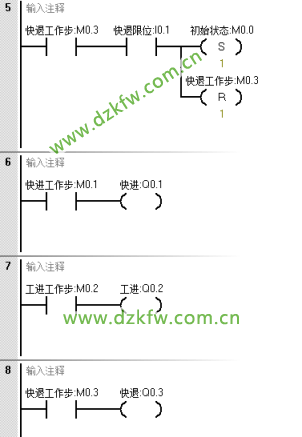
I0.1是快退限位開關,動力頭的初始狀態停留在最左邊即I0.1接通,并按下啟動按鈕I0.0時,開始執行快進Q0.1動作,到I0.2快進限位時執行工進Q0.2動作,到I0.3工進限位時執行快退Q0.3動作,快退到快退限位I0.1時進行循環。我們根據順序功能圖可以快速地編寫出梯形圖程序。
二、使用置位/復位指令
使用邏輯指令實現的順序功能控制同樣也可以利用置位復位指令實現,該方法是以轉換條件為中心的編程方法,所謂以轉換條件為中心,指的是同一種轉換在梯形圖中只能出現一次,而對輔助繼電器可以重復進行置位和復位。
我們以初始狀態步M0.0為例,如果步M0.0要實現轉換,必須滿足兩個條件。
首先M0.0是活動步,所以我們可以用SM0.1置位啟動初始狀態M0.0,其次是轉移條件滿足,即按下啟動按鈕I0.0接通,并且動力頭的初始狀態停留在最左邊即I0.1接通,所以將M0.0和I0.0、I0.1的常開觸點串聯在一起,當條件都滿足時,可以做置位M0.1,轉移到M0.1快進工作步,同時把上一個狀態M0.0復位掉。其他工作步也是按照同樣的方法去做即可。
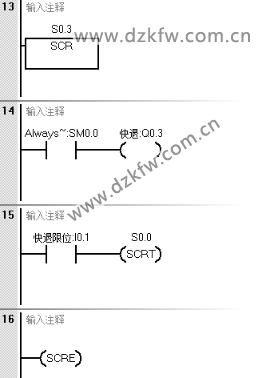
三、使用SCR/SCRT/SCRE指令
S7-200 SMART PLC提供有專用的順序控制指令,例如:
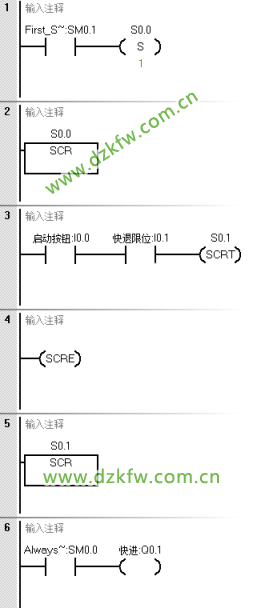
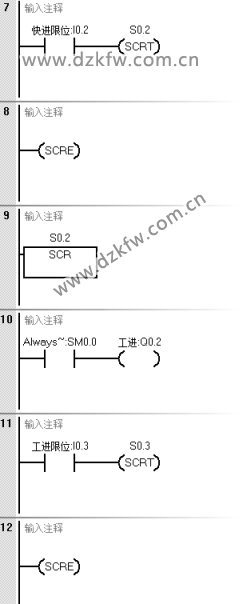
SCR/SCRT/SCRE,我們可以利用這些指令實現,這其實是由多個SCR程序段組成的,一個狀態就是一個SCR程序段,而每個SCR程序段又包括了步的起始即SCR,驅動輸出處理,轉移條件SCRT,和步的結束即SCRE。
寫程序的時候注意在SCR段中,用轉移條件對應的觸點驅動SCRT指令即可實現轉移到下一個狀態步。
這種方式跟前面的置位復位指令有所不同,這里我們將M0.0~M0.3的狀態步換成了狀態繼電器S0.0~S0.3,前面的轉移是用S置位指令,這里是使用SCRT指令。
以S0.0初始狀態為例,首先是SM0.1置位S0.0激活初始狀態,然后以SCR S0.0作為狀態的起始,SCRE作為狀態的結束,在其中間編寫轉移條件和轉移方向,也就是下啟動按鈕I0.0接通,并且動力頭的初始狀態停留在最左邊即I0.1接通,所以I0.0、I0.1的常開觸點串聯在一起,從而驅動SCRT S0.1,滿足條件時即可以轉移到S0.1狀態步中去。
以上就是使用邏輯指令、使用置位/復位指令、使用SCR/SCRT/SCRE指令等幾種不同的方法實現順序控制系統程序的方法,你掌握了嗎?沒掌握的話趕緊收藏起來~
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底