
1£®ḃÓÃĠḃġõÊỳṠŸÝS
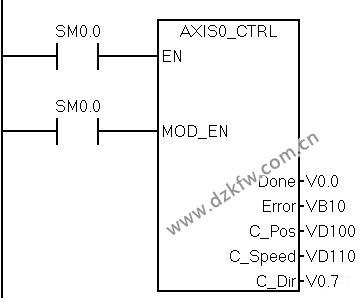
AXISx_CTRL ṪÓġÌŴò£ẀṡØÖÆ£©ḃÓÃẃÍġõÊỳṠŸß\(yẀṀn)Ó(dẀḞng)ÝS£ỲṖẄṖẀÊÇṪÔÓ(dẀḞng)ÃüÁîß\(yẀṀn)Ó(dẀḞng)ÝSÃṡṀÎCPU ẁüẁÄé RUN Ä£ÊẄr(shẀẂ)ỳÓÝdẄMB(tẀĊi)/ÇúẅḟíḂ£
ÔÚí(xiẀĊng)ÄṡÖŴÖṠḊ(duẀỲ)Ãṡlß\(yẀṀn)Ó(dẀḞng)ÝSÊṗÓÃṀËṪÓġÌŴòÒṠṀΣỲĠḃṀ_ḟ£ġÌŴòŷ(huẀỲ)ÔÚÃṡṀÎßÃèr(shẀẂ)Õ{(diẀĊo)ÓÃṀËṪÓġÌŴòḂ£ÊṗÓà SM0.0£ẀÊỳẄKé_ḃ£©Ṫṫé EN ḃṁ(shẀṀ)ṁÄÝÈëḂ£
ṗÜÄ_ẃỲÁx£ẃ
MODE£ẃ ḃÓÃÄ£KḂ£1=ṡÉḞl(fẀḂ)ËÍÃüÁî£Ṡ0=ÖŴÖṗßM(jẀỲn)ŴŴÖŴṁÄÈÎẃÎÃüÁî
Done £ẃÍêġÉË(biẀḂo)ÖẅÎṠ
Error £ẃåe(cuẀḞ)Õ`ṀúṀa£ẀṪÖṗ(jiẀḊ)£©
C_Pos £ẃÝSṁÄ®(dẀḂng)ÇḞÎṠÖãẀẄ^Ḋ(duẀỲ)¶ẀÎṠṠòÕßÏàḊ(duẀỲ)¶ẀÎṠ£©£ỲṗĊġÌÎÎṠ£ẃReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)£ṠÏàḊ(duẀỲ)Ã}_£ẃDINTŴÍṁ(shẀṀ)ŷ(jẀṀ)
C_Speed £ẃÝSṁÄ®(dẀḂng)ÇḞËÙ¶È £ỲReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)
C_Dir £ẃÝSṁÄ®(dẀḂng)ÇḞṖẄÏò£Ẁ1=ṖṀÏò£Ỳ0=ÕýÏò£©
2. ÊÖÓ(dẀḞng)ṡØÖÆÝS
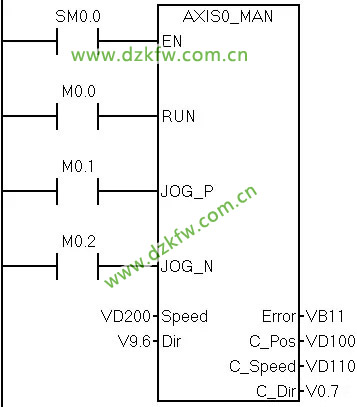
AXISx_MAN ṪÓÀýġÌ£ẀÊÖÓ(dẀḞng)Ä£ÊẄ£©ḃß\(yẀṀn)Ó(dẀḞng)ÝSÖÃéÊÖÓ(dẀḞng)Ä£ÊẄḂ£ß@ÔÊÔSëC(jẀ©)ḞṀĠṠÍỲṁÄËÙ¶Èß\(yẀṀn)ŴŴ£ỲṠòÑØÕýÏòṠòØ(fẀṀ)ÏòÂýßM(jẀỲn)Ḃ£
ÔÚÍỲÒṠr(shẀẂ)égHÄÜḃÓÃ RUNḂḃJOG_P Ṡò JOG_N ÝÈëÖ®ÒṠḂ£
ṗÜÄ_ẃỲÁx£ẃ
RUN£ẃ1=ÝSÊÖÓ(dẀḞng)ß\(yẀṀn)ŴŴ£ẀËÙ¶ÈẃÍṖẄÏòṖÖeÓÉ SpeedẃÍ Dir ṗÜÄ_ṡØÖÆ£©0=Í£ÖṗÊÖÓ(dẀḞng)ṡØÖÆ
JOG_P£ẃ1=ÕýŶD(zhuẀ£n)üc(diẀ£n)Ó(dẀḞng)ṡØÖÆ
JOG_N£ẃ1=ṖṀŶD(zhuẀ£n)üc(diẀ£n)Ó(dẀḞng)ṡØÖÆ
Speed£ẃRUNß\(yẀṀn)ŴŴr(shẀẂ)ṁÄÄṡË(biẀḂo)ËٶȣỲReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)
Dir£ẃRUNß\(yẀṀn)ŴŴr(shẀẂ)ṁÄṖẄÏò
Error £ẃåe(cuẀḞ)Õ`ṀúṀa£ẀṪÖṗ(jiẀḊ)£©
C_Pos £ẃÝS®(dẀḂng)ÇḞÎṠÖãẀẄ^Ḋ(duẀỲ)¶ẀÎṠṠòÕßÏàḊ(duẀỲ)¶ẀÎṠ£©£ỲṗĊġÌÎÎṠ£ẃReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)£ṠÏàḊ(duẀỲ)Ã}_£ẃDINTŴÍṁ(shẀṀ)ŷ(jẀṀ)
C_Speed £ẃÝS®(dẀḂng)ÇḞËÙ¶È £ỲReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)
C_Dir £ẃÝS®(dẀḂng)ÇḞṖẄÏò£Ẁ1=ṖṀÏò£Ỳ0=ÕýÏò£©
3. Ẅ^Ḋ(duẀỲ)ṠòÕßÏàḊ(duẀỲ)¶ẀÎṠ
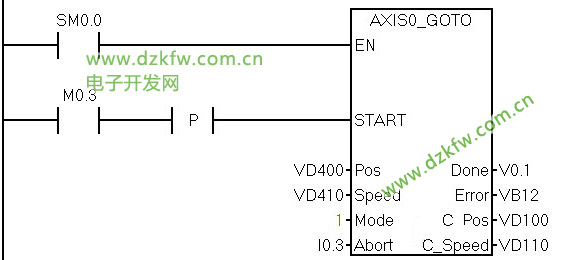
AXISx_GOTO ṪÓġÌŴòÃüÁîß\(yẀṀn)Ó(dẀḞng)ÝSŶD(zhuẀ£n)ṁẄËùŴèÎṠÖÃḂ£
ṗÜÄ_ẃỲÁx£ẃ
START£ẃÃṡẄÓÍẀÒṠ(gẀẀ)ßÃèÖÜÆÚ£ỲẅÍÌ(zhẀẂ)ŴŴÒṠṀζẀÎṠ
Pos£ẃÄṡË(biẀḂo)ÎṠÖãẀẄ^Ḋ(duẀỲ)¶ẀÎṠéṪøË(biẀḂo)üc(diẀ£n)£ỲÏàḊ(duẀỲ)¶ẀÎṠéÉüc(diẀ£n)égẅàëx£©£ỲṗĊġÌÎÎṠ£ẃReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)£ṠÏàḊ(duẀỲ)Ã}_£ẃDINTŴÍṁ(shẀṀ)ŷ(jẀṀ)
Speed£ẃÄṡË(biẀḂo)ËٶȣỲReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)
MODE£ẃÒÆÓ(dẀḞng)Ä£ÊẄ 0£ẃẄ^Ḋ(duẀỲ)ÎṠÖà 1£ẃÏàḊ(duẀỲ)ÎṠÖà 2£ẃ?jiẀ£n)ÎËÙßBÀm(xẀṀ)ÕýÏòŴýŶD(zhuẀ£n) 3£ẃ?jiẀ£n)ÎËÙßBÀm(xẀṀ)ṖṀÏòŴýŶD(zhuẀ£n)
Abort£ẃÍ£ÖṗÕýÔÚÌ(zhẀẂ)ŴŴṁÄß\(yẀṀn)Ó(dẀḞng)
Done £ẃÍêġÉË(biẀḂo)ÖẅÎṠ
Error £ẃåe(cuẀḞ)Õ`ṀúṀa£ẀṪÖṗ(jiẀḊ)£©
C_Pos £ẃÝS®(dẀḂng)ÇḞÎṠÖãẀẄ^Ḋ(duẀỲ)¶ẀÎṠṠòÕßÏàḊ(duẀỲ)¶ẀÎṠ£©£ỲṗĊġÌÎÎṠ£ẃReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)£ṠÏàḊ(duẀỲ)Ã}_£ẃDINTŴÍṁ(shẀṀ)ŷ(jẀṀ)
C_Speed £ẃÝS®(dẀḂng)ÇḞËÙ¶È £ỲReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)
4. ĠéÕÒ
ḃṡỳüc(diẀ£n)
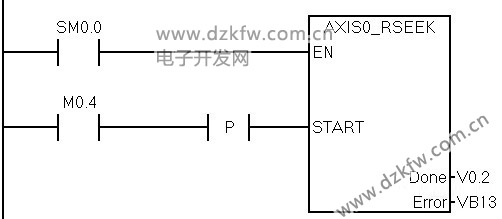
AXISx_RSEEK ṪÓġÌŴò£ẀËÑËṫ ḃṡỳüc(diẀ£n)ÎṠÖã©ÊṗÓÃẄMB(tẀĊi)/ÇúẅḟíÖŴṁÄËÑËṫṖẄṖẀḃÓ(dẀḞng) ḃṡỳüc(diẀ£n)ËÑËṫĠÙṪṫḂ£
ß\(yẀṀn)Ó(dẀḞng)ÝSÕÒṁẄ ḃṡỳüc(diẀ£n)ÇÒß\(yẀṀn)Ó(dẀḞng)Í£Öṗẃó£Ỳß\(yẀṀn)Ó(dẀḞng)ÝSḃ RP_OFFSET ḃṁ(shẀṀ)ÖṁÝdÈë®(dẀḂng)ÇḞÎṠÖÃḂ£
ṗÜÄ_ẃỲÁx£ẃ
START£ẃÃṡẄÓÍẀÒṠ(gẀẀ)ßÃèÖÜÆÚ£ỲẅÍÌ(zhẀẂ)ŴŴÒṠṀÎĠéÕÒ ḃṡỳüc(diẀ£n)£Ẁ ḃṡỳüc(diẀ£n)ĠéÕÒṖẄÊẄÓÉÝSẄMB(tẀĊi)Ṁ_¶Ẁ£©
Done £ẃÍêġÉË(biẀḂo)ÖẅÎṠ
Error £ẃåe(cuẀḞ)Õ`ṀúṀa£ẀṪÖṗ(jiẀḊ)£©
5. ỳÓÝd
ḃṡỳüc(diẀ£n)ÆḋÒÆÁṡ
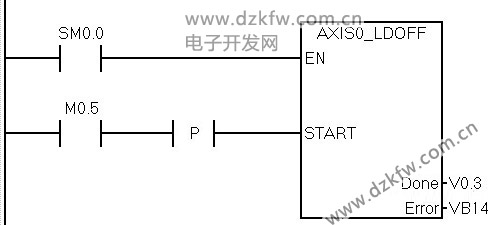
AXISx_LDOFF ṪÓġÌŴò£ẀỳÓÝd ḃṡỳüc(diẀ£n)ÆḋÒÆÁṡ£©ẄẀÁḃÒṠ(gẀẀ)Åc ḃṡỳüc(diẀ£n)ÌÓÚĠṠÍỲÎṠÖÃṁÄŴÂṁÄÁãÎṠÖÃḂ£
ÔÚÌ(zhẀẂ)ŴŴÔṪÓġÌŴòÖ®ÇḞ£ỲḟØíÊṪÏÈṀ_¶Ẁ ḃṡỳüc(diẀ£n)ṁÄÎṠÖÃḂ£ßḟØíḃC(jẀ©)ÆṫÒÆÖÁÆŵÊỳÎṠÖÃḂ£
®(dẀḂng)ṪÓġÌŴòḞl(fẀḂ)ËÍ LDOFF ÃüÁîr(shẀẂ)£Ỳß\(yẀṀn)Ó(dẀḞng)ÝSÓ(jẀỲ)ËãÆŵÊỳÎṠÖãẀ®(dẀḂng)ÇḞÎṠÖã©Åc ḃṡỳüc(diẀ£n)ÎṠÖÃÖ®égṁÄÆḋÒÆÁṡḂ£ß\(yẀṀn)Ó(dẀḞng)ÝSÈṠẃóḃËãġöṁÄÆḋÒÆÁṡṀæḊ(chẀġ)ṁẄ RP_OFFSET ḃṁ(shẀṀ)Ġḃḃ®(dẀḂng)ÇḞÎṠÖÃÔO(shẀẀ)é 0Ḃ£ß@ḃÆŵÊỳÎṠÖÃẄẀÁḃéÁãÎṠÖÃḂ£
ÈçṗûëC(jẀ©)ʧÈċḊ(duẀỲ)ÎṠÖÃṁÄṪṖÛ£ẀÀýÈçàëṠòÊÖÓ(dẀḞng)ẁüQëC(jẀ©)ṁÄÎṠÖã©£ỲÄúṡÉÒÔÊṗÓà AXISx_RSEEK ṪÓġÌŴòṪÔÓ(dẀḞng)ÖØŴÂẄẀÁḃÁãÎṠÖÃḂ£
ṗÜÄ_ẃỲÁx£ẃ
START£ẃÃṡẄÓÍẀÒṠ(gẀẀ)ßÃèÖÜÆÚ£ỲẅÍÌ(zhẀẂ)ŴŴÒṠṀÎỳÓÝd ḃṡỳüc(diẀ£n)ÆḋÒÆÁṡ
Done £ẃÍêġÉË(biẀḂo)ÖẅÎṠ
Error £ẃåe(cuẀḞ)Õ`ṀúṀa£ẀṪÖṗ(jiẀḊ)£©
6. ỳÓÝdÎṠÖÃ
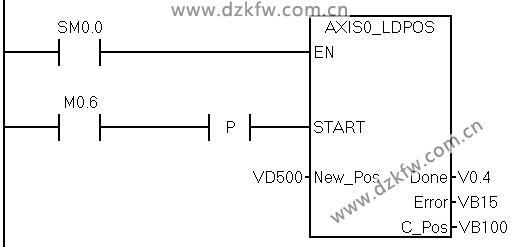
AXISx_LDPOS ṪÓġÌŴò£ẀỳÓÝdÎṠÖã©ḃß\(yẀṀn)Ó(dẀḞng)ÝSÖŴṁÄ®(dẀḂng)ÇḞÎṠÖÃÖṁẁüẁÄéŴÂÖṁḂ£
ßṡÉÒÔÊṗÓÃḟẅṪÓġÌŴò?yẀĊn)éÈÎẃÎẄ^Ḋ(duẀỲ)ÒÆÓ(dẀḞng)ÃüÁîẄẀÁḃÒṠ(gẀẀ)ŴÂṁÄÁãÎṠÖÃḂ£
ṗÜÄ_ẃỲÁx£ẃ
START£ẃÃṡẄÓÍẀÒṠ(gẀẀ)ßÃèÖÜÆÚ£ỲẅÍÌ(zhẀẂ)ŴŴÒṠṀÎỳÓÝdÎṠÖÃ
New_Pos£ẃÒẂỳÓÝdé®(dẀḂng)ÇḞÎṠÖÃṁÄÖṁ
Done £ẃÍêġÉË(biẀḂo)ÖẅÎṠ
Error £ẃåe(cuẀḞ)Õ`ṀúṀa£ẀṪÖṗ(jiẀḊ)£©
C_Pos £ẃÝS®(dẀḂng)ÇḞÎṠÖãẀẄ^Ḋ(duẀỲ)¶ẀÎṠṠòÕßÏàḊ(duẀỲ)¶ẀÎṠ£©£ỲṗĊġÌÎÎṠ£ẃReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)£ṠÏàḊ(duẀỲ)Ã}_£ẃDINTŴÍṁ(shẀṀ)ŷ(jẀṀ)
7. Ì(zhẀẂ)ŴŴÇúẅß\(yẀṀn)Ó(dẀḞng)
AXISx_RUN ṪÓġÌŴò£Ẁß\(yẀṀn)ŴŴÇúẅ£©ÃüÁîß\(yẀṀn)Ó(dẀḞng)ÝSḞṀÕÕṀæḊ(chẀġ)ÔÚẄMB(tẀĊi)/ÇúẅḟíṁÄÌضẀÇúẅÌ(zhẀẂ)ŴŴß\(yẀṀn)Ó(dẀḞng)ĠÙṪṫḂ£
ṗÜÄ_ẃỲÁx£ẃ
START£ẃÃṡẄÓÍẀÒṠ(gẀẀ)ßÃèÖÜÆÚ£ỲẅÍÌ(zhẀẂ)ŴŴÒṠṀÎÔO(shẀẀ)¶ẀṁÄÇúẅß\(yẀṀn)Ó(dẀḞng)
Profile£ẃŴèÒẂÌ(zhẀẂ)ŴŴṁÄÇúẅ£ẀÓÉṁØÖṖṀæḊ(chẀġ)£©
Aboyt£ẃÍ£Öṗ®(dẀḂng)ÇḞÌ(zhẀẂ)ŴŴṁÄÇúẅ
Done£ẃÍêġÉË(biẀḂo)Öẅ
Error£ẃåe(cuẀḞ)Õ`ṀúṀa£ẀṪÖṗ(jiẀḊ)£©
C_Profile£ẃÕýÔÚß\(yẀṀn)ŴŴṁÄÇúẅ
C_Step£ẃÕýÔÚß\(yẀṀn)ŴŴÇúẅÈ(nẀẀi)®(dẀḂng)ÇḞÌ(zhẀẂ)ŴŴṁÄĠẄ
C_Pos £ẃÝS®(dẀḂng)ÇḞÎṠÖãẀẄ^Ḋ(duẀỲ)¶ẀÎṠṠòÕßÏàḊ(duẀỲ)¶ẀÎṠ£©£ỲṗĊġÌÎÎṠ£ẃReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)£ṠÏàḊ(duẀỲ)Ã}_£ẃDINTŴÍṁ(shẀṀ)ŷ(jẀṀ)
C_Speed £ẃÝS®(dẀḂng)ÇḞËÙ¶È £ỲReal ŴÍṁ(shẀṀ)ŷ(jẀṀ)

ṡṀÍêß@Ŵ©ÄãW(xuẀḊ)ṁẄÁËá£ṡ
 ṖṁṠØíĠṡ
ṖṁṠØíĠṡ ËḃŴÂíÃæ
ËḃŴÂíÃæ ÏÂṁẄíṁṪ
ÏÂṁẄíṁṪ