
- 任務(wù)描述
某企業(yè)承擔(dān)了一個(gè)機(jī)械手控制系統(tǒng)設(shè)計(jì)任務(wù),要求用機(jī)械手將工件由A處抓取并放到B處,機(jī)械手控制示意圖如下圖所示。
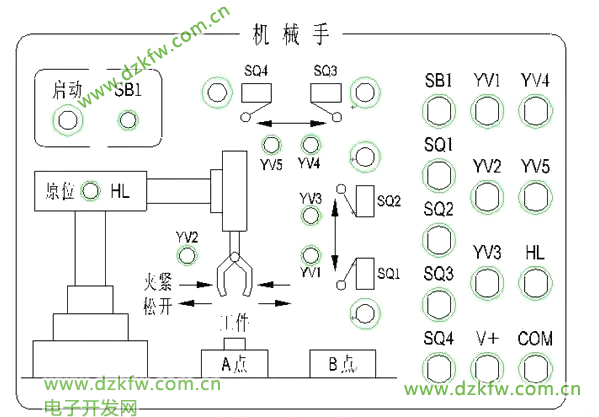
控制要求:機(jī)械手停在初始狀態(tài),SQ4=SQ2=1,SQ3=SQ1=0,原位指示燈HL點(diǎn)亮,按下“SB1”啟動(dòng)開(kāi)關(guān),下降指示燈YV1點(diǎn)亮,機(jī)械手下降,(SQ2=0)下降到A處后(SQ1=1)夾緊工件,夾緊指示燈YV2點(diǎn)亮;夾緊工件后,機(jī)械手上升(SQ1=0),上升指示燈YV3點(diǎn)亮,上升到位后(SQ2=1),機(jī)械手右移(SQ4=0),右移指示燈YV4點(diǎn)亮;機(jī)械手右移到位后(SQ3=1)下降指示燈YV1點(diǎn)亮,機(jī)械手下降;機(jī)械手下降到位后(SQ1=1)夾緊指示燈YV2熄滅,機(jī)械手放松。請(qǐng)用可編程控制器設(shè)計(jì)其控制系統(tǒng)并調(diào)試。
- I/O地址分配

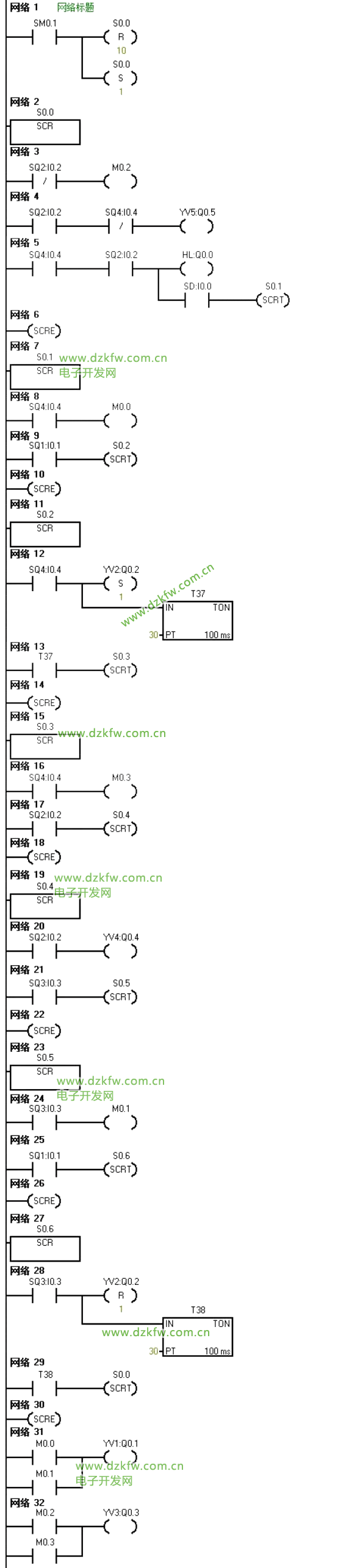
- 程序(梯形圖)西門子S7-200 SMART PLC的機(jī)械手控制控制系統(tǒng)設(shè)計(jì)
 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底