
【摘要】
本文提出一種運用可編程控制器(PLC)對停車場進出及停放指示進行管理的方案。本停車場由5位停車位、入口檢測器、出口檢測器、道閘管理系統、七段數碼管用來顯示車庫內車輛數、尚有車位指示燈、車位已滿指示燈等部分組成。采用PLC的自動控制系統,由于PLC具有可靠性、易操作性、靈活性等優點,因此,本控制系統與傳統停車場相比,大大提高了設計效率,維護周期短、調試方便、成本較低、易操作、可靠性高,有很強的實用價值。
目錄
1緒論
1.1課題的背景及意義
1.2 PLC在國內外的研究情況
2 PLC簡介
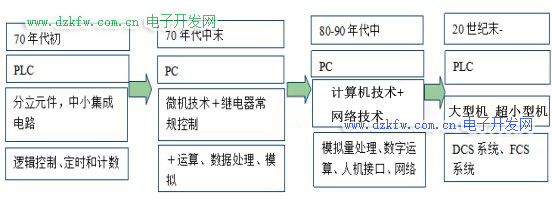
2.1 PLC的發展歷程
2.2可編程控器概述
2.3 可編程控制器的定義
2.4 PLC的基本結構
2.5 PLC的特點
2.5.1 可靠性高,抗干擾能力強
2.5.2 硬件配套齊全,功能完善,適用性強
2.5.3 易學易用,深受工程技術人員歡迎
2.5.4 系統的設計、安裝、調試工作量小,維護方便,容易改造
3 PLC控制系統的設計
3.1 PLC控制系統的設計內容及設計步驟
3.1.1 PLC控制系統的設計內容
3.1.2 設計步驟
3.2 PLC的硬件設計和軟件設計及調試
3.2.1 PLC的硬件設計
3.2.2 PLC的軟件設計
3.3.3 軟件硬件的調試
4 器件簡介
4.1 電機簡介
4.1.1電機簡介
4.1.2 定義
4.1.3 電機的分類
4.1.4 電機額定參數
4.1.5 電機的選型
4.2 光電傳感器簡介
4.2.1 光電傳感器的作用
4.2.2 光電傳感器工作原理
4.2.3 光電傳感器的分類和工作方式
4.2.4 光電傳感器優點
4.2.5 光電傳感器的應用
4.3 行程開關簡介
4.3.1 行程開關的概述
4.3.2 行程開關按其結構分類
4.3.3 行程開關用途
5 基于PLC的停車場車位控制系統概述
5.1課 題 內 容
5.2設計目標及原則
5.2.1目標
5.2.2原則
5.3課題要求
5.3.1控制系統的I/O分配及器件選型
5.3.2 程序的編制根據系統的控制要求,編制程序。
5.4系統工作過程
5.5控制程序流程圖
5.6系統硬件電路設計
5.6.1 CPU的選擇
5.6.2 I/O地址分配
5.6.3 I/O接線圖
結束語
致謝
參考文獻
1緒論
1.1課題的背景及意義
隨著社會的發展,城市中的汽車越來越多。車輛集中存放管理的場所被人類提出車輛進出的秩序、車輛存放的安全性、車輛存放管理的有償性等要求。停車場控制系統是指基于現代化電子與信息技術,在停車區域的出入口處安裝自動識別裝置,通過非接觸式卡或車牌識別來對出入此區域的車輛實施判斷識別、準入/拒絕、引導、記錄、收費、放行等管理,其目的是有效的控制車輛與人員的出入,記錄所有詳細資料并自動計算收費額度,實現對場內車輛與收費的安全管理。因此,本課題針對停車場控制系統進行研究具有很強的理論與現實意義。
采用PLC的自動控制系統,由于PLC本身具有的可靠性、易操作性、靈活性等優點,使得本控制系統與傳統停車場相比,大大提高了設計效率,維護周期短、調試方便、成本較低、易操作、可靠性高,有很強的實用價值。停車場管理系統重點要做到標準指示車輛進出,車輛進入時給予司機準確的車位數量與具體位置,車輛進入后,記錄車輛總量;車輛離開時,減少車輛的數量。車輛進出指示可完全由PLC作為中央控制處理,大大減輕了現代社會人“停車難”的問題。
本次設計課題結構特點明確,涵概面廣。在整個設計過程中,我得到了畢業設計指導老師孜孜不倦的指導,也深切體會到科學嚴謹的設計思想。由于本人設計經驗有限,不妥和錯誤之處,懇請各位老師指正。
1.2 PLC在國內外的研究情況
可編程控制器是六十年代發展起來的一種自動控制裝置是一種嵌入式的工控機,它以順序控制為主回路調節為輔能完成邏輯判斷、定時、計數、記憶和算術運算功能既能進行開關量控制又能進行模擬量控制還具有通信功能。
目前,在工業自動化控制領域主要分為PLC(可編程控制器簡)控制、工控機和嵌入式控制,而PLC自1968年誕生以后以驚人的速度成為了這一領域的主導者,為各種各樣的自動化控制設備提供了非常可靠的控制應用。其主要原因,在于它能夠為自動化控制應用提供安全可靠和比較完善的解決方案,適合于當前工業企業對自動化的需要,PLC將來在我國會有更廣闊的發展空間。
2 PLC簡介
2.1 PLC的發展歷程
2.2可編程控器概述
可編程控制器(Programmable Controller)是計算機家族中的一員,是為工業控制應用而設計制造的。早期的可編程控制器稱作可編程邏輯控制(Programmable Logic Controller),簡稱PLC,它主要用來代替繼電器實現邏輯控制。隨著技術的發展,這種裝置的功能已經大大超過了邏輯控制的范圍,因此,今天這種裝置稱作可編程控制器,簡稱PC。但是為了避免與個人計算機(Personal Computer)的簡稱混淆,所以將可編程控制器簡稱PLC。
2.3 可編程控制器的定義
可編程控制器簡稱PC(英文全稱:Programmable Controller),它經歷了可編程序矩陣控制器PMC、可編程序順序控制器PSC、可編程序邏輯控制器PLC(英文全稱:Programmable Logic Controller)和可編程序控制器PC幾個不同時期。為與個人計算機(PC)相區別,現在仍然沿用可編程邏輯控制器這個老名字。
1987年國際電工委員會(International Electrical Committee)頒布的PLC標準草案中對PLC做了如下定義:
“PLC是一種專門為在工業環境下應用而設計的數字運算操作的電子裝置。它采用可以編制程序的存儲器,用來在其內部存儲執行邏輯運算、順序運算、計時、計數和算術運算等操作的指令,并能通過數字式或模擬式的輸入和輸出,控制各種類型的機械或生產過程。PLC及其有關的外圍設備都應該按易于與工業控制系統形成一個整體,易于擴展其功能的原則而設計。”
2.4 PLC的基本結構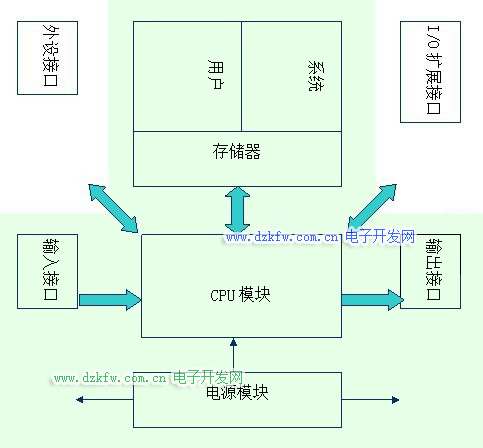
圖2-1 PLC基本結構
2.5 PLC的特點
2.5.1 可靠性高,抗干擾能力強
PLC用軟件代替大量的中間繼電器和時間繼電器,僅剩下與輸入和輸出有關的少量硬件,接線可減少到繼電器控制系統的1/10~1/100,因觸點接觸不良造成的故障大為減少。
高可靠性是電氣控制設備的關鍵性能。PLC由于采用現代大規模集成電路技術,采用嚴格的生產工藝制造,內部電路采取了先進的抗干擾技術,具有很高的可靠性。
2.5.2 硬件配套齊全,功能完善,適用性強
PLC發展到今天,已經形成了大、中、小各種規模的系列化產品,并且已經標準化、系列化、模塊化,配備有品種齊全的各種硬件裝置供用戶選用,用戶能靈活方便地進行系統配置,組成不同功能、不同規模的系統。PLC的安裝接線也很方便,一般用接線端子連接外部接線。PLC有較強的帶負載能力,可直接驅動一般的電磁閥和交流接觸器,可以用于各種規模的工業控制場合。除了邏輯處理功能以外,現代PLC大多具有完善的數據運算能力,可用于各種數字控制領域。近年來PLC的功能單元大量涌現,使PLC滲透到了位置控制、溫度控制、CNC等各種工業控制中。加上PLC通信能力的增強及人機界面技術的發展,使用PLC組成各種控制系統變得非常容易。
2.5.3 易學易用,深受工程技術人員歡迎
PLC作為通用工業控制計算機,是面向工礦企業的工控設備。它接口容易,編程語言易于為工程技術人員接受。梯形圖語言的圖形符號與表達方式和繼電器電路圖相當接近,只用PLC的少量開關量邏輯控制指令就可以方便地實現繼電器電路的功能。為不熟悉電子電路、不懂計算機原理和匯編語言的人使用計算機從事工業控制打開了方便之門。
2.5.4 系統的設計、安裝、調試工作量小,維護方便,容易改造
PLC的梯形圖程序一般采用順序控制設計法。這種編程方法很有規律,很容易掌握。對于復雜的控制系統,梯形圖的設計時間比設計繼電器系統電路圖的時間要少得多。
PLC用存儲邏輯代替接線邏輯,大大減少了控制設備外部的接線,使控制系統設計及建造的周期大為縮短,同時維護也變得容易起來。更重要的是使同一設備經過改變程序改變生產過程成為可能。這很適合多品種、小批量的生產場合。
3 PLC控制系統的設計
3.1 PLC控制系統的設計內容及設計步驟
3.1.1 PLC控制系統的設計內容
(1)根據設計任務書,進行工藝分析,并確定控制方案,它是設計的依據。
(2)選擇輸入設備(如按鈕、開關、傳感器等)和輸出設備(如繼電器、接觸器、指示燈等執行機構)。
(3)選定PLC的型號(包括機型、容量、I/O模塊和電源等)。
(4)分配PLC的I/O點,繪制PLC的I/O硬件接線圖。
(5)編寫程序并調試。
(6)設計控制系統的操作臺、電氣控制柜等以及安裝接線圖。
(7)編寫設計說明書和使用說明書。
3.1.2 設計步驟
(1)工藝分析
深入了解控制對象的工藝過程、工作特點、控制要求,并劃分控制的各個階段,歸納各個階段的特點,和各階段之間的轉換條件,畫出控制流程圖或功能流程圖。
(2)選擇合適的PLC類型
在選擇PLC機型時,主要考慮下面幾點:
a、功能的選擇。 對于小型的PLC主要考慮I/O擴展模塊、A/D與D/A模塊以及指令功能(如中斷、PID等)。
b、I/O點數的確定。 統計被控制系統的開關量、模擬量的I/O點數,并考慮以后的擴充(一般加上10%~20%的備用量),從而選擇PLC的I/O點數和輸出規格。
c、內存的估算。 用戶程序所需的內存容量主要與系統的I/O點數、控制要求、程序結構長短等因素有關。一般可按下式估算:存儲容量=開關量輸入點數×10+開關量輸出點數×8+模擬通道數×100+定時器/計數器數量×2+通信接口個數×300+備用量。
(3)分配I/O點。
分配PLC的輸入/輸出點,編寫輸入/輸出分配表或畫出輸入/輸出端子的接線圖,接著就可以進行PLC程序設計,同時進行控制柜或操作臺的設計和現場施工。
(4)程序設計。
對于較復雜的控制系統,根據生產工藝要求,畫出控制流程圖或功能流程圖,然后設計出梯形圖,再根據梯形圖編寫語句表程序清單,對程序進行模擬調試和修改,直到滿足控制要求為止。
(5)控制柜或操作臺的設計和現場施工。
設計控制柜及操作臺的電器布置圖及安裝接線圖;設計控制系統各部分的電氣互鎖圖;根據圖紙進行現場接線,并檢查。
(6)應用系統整體調試。
如果控制系統由幾個部分組成,則應先作局部調試,然后再進行整體調試;如果控制程序的步序較多,則可先進行分段調試,然后連接起來總調。
(7)編制技術文件。
技術文件應包括:可編程控制器的外部接線圖等電氣圖紙,電器布置圖,電器元件明細表,順序功能圖,帶注釋的梯形圖和說明。
3.2 PLC的硬件設計和軟件設計及調試3.2.1 PLC的硬件設計
PLC硬件設計包括:PLC及外圍線路的設計、電氣線路的設計和抗干擾措施的設計等。
選定PLC的機型和分配I/O點后,硬件設計的主要內容就是電氣控制系統的原理圖的設計,電氣控制元器件的選擇和控制柜的設計。電氣控制系統的原理圖包括主電路和控制電路。控制電路中包括PLC的I/O接線和自動、手動部分的詳細連接等。電器元件的選擇主要是根據控制要求選擇按鈕、開關、傳感器、保護電器、接觸器、指示燈、電磁閥等。
3.2.2 PLC的軟件設計
軟件設計包括系統初始化程序、主程序、子程序、中斷程序、故障應急措施和輔助程序的設計,小型開關量控制一般只有主程序。首先應根據總體要求和控制系統的具體情況,確定程序的基本結構,畫出控制流程圖或功能流程圖,簡單的可以用經驗法設計,復雜的系統一般用順序控制設計法設計。
3.3.3 軟件硬件的調試
調試分模擬調試和聯機調試。
軟件設計好后一般先作模擬調試。模擬調試可以通過仿真軟件來代替PLC硬件在計算機上調試程序。如果有PLC的硬件,可以用小開關和按鈕模擬PLC的實際輸入信號(如起動、停止信號)或反饋信號(如限位開關的接通或斷開),再通過輸出模塊上各輸出位對應的指示燈,觀察輸出信號是否滿足設計的要求。需要模擬量信號I/O時,可用電位器和萬用表配合進行。在編程軟件中可以用狀態圖或狀態圖表監視程序的運行或強制某些編程元件。
硬件部分的模擬調試主要是對控制柜或操作臺的接線進行測試。可在操作臺的接線端子上模擬PLC外部的開關量輸入信號,或操作按鈕的指令開關,觀察對應PLC輸入點的狀態。用編程軟件將輸出點強制ON/OFF,觀察對應的控制柜內PLC負載(指示燈、接觸器等)的動作是否正常,或對應的接線端子上的輸出信號的狀態變化是否正確。
聯機調試時,把編制好的程序下載到現場的PLC中。調試時,主電路一定要斷電,只對控制電路進行聯機調試。通過現場的聯機調試,還會發現新的問題或對某些控制功能的改進。
4 器件簡介
4.1 電機簡介
4.1.1電機簡介
電機,俗稱電“馬達”,是指依據電磁感應定律將電能轉換為機械能的一種電動設備。電動機也稱(俗稱)馬達,在電路中用字母“M”表示。它的主要作用是產生機械驅動轉矩,作為各種電器和機械運動的動力源,發電機在電路中用字母“G”表示。

圖5-1 電機
4.1.2 定義
依據電磁感應定律實現電能的轉換或傳遞的一種電磁裝置。
4.1.3 電機的分類
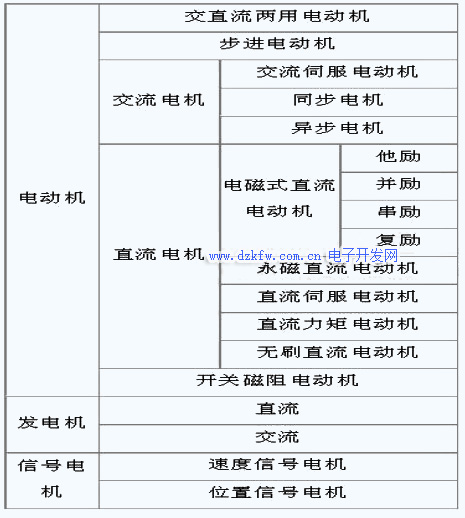
圖5-2 電機分類
4.1.4 電機額定參數
額定電壓、額定電流、額定功率、功率因數、效率
4.1.5 電機的選型
電動機的選擇是一部電動機節能運行的第一步。只有選好電動機,再加上采取一定的節能措施才能達到節能的目的。其基本原則是:
(1)根據生產機械的負載性質和生產工藝及各種不同的用途,對電動機的起動、制動、正反轉、調速的要求,選擇適合負載特性的電動機。
(2)選則具有與使用場所的環境相適應的,如溫度、濕度、灰塵、淋水及易燃易爆等確定防護及冷卻方式的電動機。其外殼防護和冷卻方式選擇方法見有關資料.
(3)根據負載轉矩、轉速變化和啟動頻繁程度等要求,計算和確定合適的電動機容量。通常電動機在75%—100%額定負載率時效率最高。但應考慮其溫升限度和過載能力和啟動轉矩,一般應留有一定的余量,選擇其負載率在80%—90%為最好。
(4)根據電源情況,對電動機功率因數等性能的影響,選擇電動機的額定電壓和類型。
(5)根據生產機械所要求的轉速 ,以及傳動設備系統的復雜程度,選擇電動機的轉速。
(6)選擇可靠性高、便于維修,并應考慮互換性,所以盡量選用標準電動機。
(1)根據生產機械的負載性質和生產工藝及各種不同的用途,對電動機的起動、制動、正反轉、調速的要求,選擇適合負載特性的電動機。
(2)選則具有與使用場所的環境相適應的,如溫度、濕度、灰塵、淋水及易燃易爆等確定防護及冷卻方式的電動機。其外殼防護和冷卻方式選擇方法見有關資料.
(3)根據負載轉矩、轉速變化和啟動頻繁程度等要求,計算和確定合適的電動機容量。通常電動機在75%—100%額定負載率時效率最高。但應考慮其溫升限度和過載能力和啟動轉矩,一般應留有一定的余量,選擇其負載率在80%—90%為最好。
(4)根據電源情況,對電動機功率因數等性能的影響,選擇電動機的額定電壓和類型。
(5)根據生產機械所要求的轉速 ,以及傳動設備系統的復雜程度,選擇電動機的轉速。
(6)選擇可靠性高、便于維修,并應考慮互換性,所以盡量選用標準電動機。
4.2 光電傳感器簡介
4.2.1 光電傳感器的作用
檢測物體的有無、檢測透明物體、檢測色標、檢測顏色、檢測發光物體、檢測位移。
4.2.2 光電傳感器工作原理
光電傳感器是通過把光強度的變化轉換成電信號的變化來實現控制的。光電傳感器在一般情況下,有三部分構成,它們分為:發送器、接收器和檢測電路。發送器對準目標發射光束,發射的光束一般來源于半導體光源,發光二極管(LED)、激光二極管及紅外發射二極管。光束不間斷地發射,或者改變脈沖寬度。接收器有光電二極管、光電三極管、光電池組成。在接收器的前面,裝有光學元件如透鏡和光圈等。在其后面是檢測電路,它能濾出有效信號和應用該信號。
4.2.3 光電傳感器的分類和工作方式
(1)槽型光電傳感器
把一個光發射器和一個接收器面對面地裝在一個槽的兩側的是槽形光電。發光器能發出紅外光或可見光,在無阻情況下光接收器能收到光。但當被檢測物體從槽中通過時,光被遮擋,光電開關便動作。輸出一個開關控制信號,切斷或接通負載電流,從而完成一次控制動作。槽形開關的檢測距離因為受整體結構的限制一般只有幾厘米。
把一個光發射器和一個接收器面對面地裝在一個槽的兩側的是槽形光電。發光器能發出紅外光或可見光,在無阻情況下光接收器能收到光。但當被檢測物體從槽中通過時,光被遮擋,光電開關便動作。輸出一個開關控制信號,切斷或接通負載電流,從而完成一次控制動作。槽形開關的檢測距離因為受整體結構的限制一般只有幾厘米。
(2)對射型光電傳感器
若把發光器和收光器分離開,就可使檢測距離加大。由一個發光器和一個收光器組成的光電開關就稱為對射分離式光電開關,簡稱對射式光電開關。它的檢測距離可達幾米乃至幾十米。使用時把發光器和收光器分別裝在檢測物通過路徑的兩側,檢測物通過時阻擋光路,收光器就動作輸出一個開關控制信號。
若把發光器和收光器分離開,就可使檢測距離加大。由一個發光器和一個收光器組成的光電開關就稱為對射分離式光電開關,簡稱對射式光電開關。它的檢測距離可達幾米乃至幾十米。使用時把發光器和收光器分別裝在檢測物通過路徑的兩側,檢測物通過時阻擋光路,收光器就動作輸出一個開關控制信號。
(3)反光板型光電開關
把發光器和收光器裝入同一個裝置內,在它的前方裝一塊反光板,利用反射原理完成光電控制作用的稱為反光板反射式(或反射鏡反射式)光電開關。正常情況下,發光器發出的光被反光板反射回來被收光器收到;一旦光路被檢測物擋住,收光器收不到光時,光電開關就動作,輸出一個開關控制信號。
把發光器和收光器裝入同一個裝置內,在它的前方裝一塊反光板,利用反射原理完成光電控制作用的稱為反光板反射式(或反射鏡反射式)光電開關。正常情況下,發光器發出的光被反光板反射回來被收光器收到;一旦光路被檢測物擋住,收光器收不到光時,光電開關就動作,輸出一個開關控制信號。
(4)擴散反射型光電開關
它的檢測頭里也裝有一個發光器和一個收光器,但前方沒有反光板。正常情況下發光器發出的光收光器是找不到的。當檢測物通過時擋住了光,并把光部分反射回來,收光器就收到光信號,輸出一個開關信號。
4.2.4 光電傳感器優點
它的檢測頭里也裝有一個發光器和一個收光器,但前方沒有反光板。正常情況下發光器發出的光收光器是找不到的。當檢測物通過時擋住了光,并把光部分反射回來,收光器就收到光信號,輸出一個開關信號。
光電傳感器是采用光電元件作為檢測元件,首先把被測量的變化轉變為信號的變化,然后借助光電元件進一步將光信號轉換成電信號。光電傳感器一般由光源、光學通路和光電元件3部分組成。光電檢測方法具有精度高、反應快、非接觸等優點,而且可測參數多,傳感器的結構簡單,形式靈活多樣,體積小。近年來,隨著光電技術的發展,光電傳感器已成為系列產品,其品種及產量日益增加,用戶可根據需要選用各種規格產品,在各種輕工自動機上獲得廣泛的應用。
4.2.5 光電傳感器的應用
光敏電阻可用于進行光的測量和光的控制,測量方面主要是用于測量光強,控制方面最常見的就是路燈控制和樓道感應燈的控制,在電路接通的狀態下,路燈會隨著周圍光強的變化而變化,樓道中的燈白天不亮晚上亮也利用了光敏電阻的對光的感應特點。光敏電阻還被應用于海上導航,通常海上的浮標用的就是光敏電阻作為航道燈的開關,到晚上光敏電阻阻值變小,接通控制電路,將燈打開;白天光敏電阻增大將控制電路斷開,關掉電燈。
光敏管大體有開關作用,環境光檢測作用,各種光線接收作用。在太陽能自動跟蹤控制中,做光電檢測用,接受太陽光,校正方位。光敏二級管被應用于收音機、電視、電腦等設備中,比如用LED發光二極光替代液晶顯示器背后的光源,能達到節能且穩定的作用。光敏三極管可用來控制開關的狀態,其主要原因是三極管對光照強度十分敏感,可以根據根據光照強弱來控制電流大小,從而在繼電器的配合下控制開關的通斷狀態,實現自動化控制。由于光敏管對光的敏感性很高,還可用于測量溫度,因為不同溫度的物體輻射的光不同,以此可以間接測量溫度。此外,光敏三極管還可用于傳輸信號,如光藕合器,光耦合器亦稱光電隔離器,簡稱光耦,光耦合器以光為媒介傳輸電信號,它對輸入、輸出電信號有良好的隔離作用,所以,它在各種電路中得到廣泛的應用。另外,紅光光敏管可用于測量紅外線,這一點可用來做夜視儀。
硅光電池在日常生活中也是十分常見的,因為它能將光能轉變為電能,像一些太陽能發電板和太陽能電池中就有硅光電池,被廣泛用于衛星、太陽能發電、太陽能熱水器以及手機等。
光電傳感器的用途很多很廣,還有一些等待我們去發現。比如我們經常抱怨陽光下看不清手機和電腦,我們可以利用光敏器件來改變手機和電腦的屏幕亮度,從而更能看清楚,。還有我們的空調,可以通過檢測紅外線自動調至人的舒適溫度,當溫度過低或過高就開啟調節裝置,若在人體舒適范圍左右則可關閉調節裝置,從而節省能源。我們還可以穿一件有硅光電池板的衣服,衣服內有溫度調節裝置,由硅光電池提供能源,調節溫度。
4.3 行程開關簡介4.3.1 行程開關的概述
行程限位開關又稱限位開關,用于控制機械設備的行程及限位保護。在實際生產中,將行程限位開關安裝在預先安排的位置,當裝于生產機械運動部件上的模塊撞擊行程開關時, 行程限位開關的觸點動作,實現電路的切換。因此, 行程限位開關是一種根據運動部件的行程位置而切換電路的電器,它的作用原理與按鈕類似。行程開關廣泛用于各類機床和起重機械,用以控制其行程、進行終端限位保護。在電梯的控制電路中,還利用行程限位開關來控制開關轎門的速度、自動開關門的限位,轎廂的上、下限位保護。
4.3.2 行程開關按其結構分類
- 直動式行程開關
- 其結構原理如圖5-3所示,其動作原理與按鈕開關相同,但其觸點的分合速度取決于生產機械的運行速度,不宜用于速度低于0.4m/min的場所。
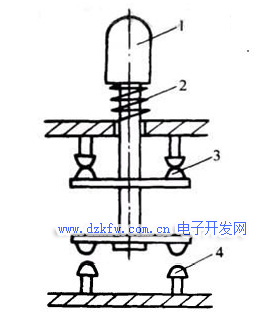
圖5-3 直動式行程開關
1-推桿 2-彈簧 3-動斷觸點 4-動合觸點
(2)滾輪式行程開關
其結構原理如圖5-4所示,當被控機械上的撞塊撞擊帶有滾輪的撞桿時,撞桿轉向右邊,帶動凸輪轉動,頂下推桿,使微動開關中的觸點迅速動作。當運動機械返回時,在復位彈簧的作用下,各部分動作部件復位。
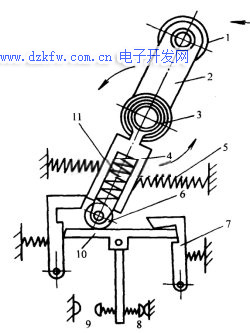
圖5-4 滾輪式行程開關
1-滾輪 2-上轉臂3、5、11-彈簧4-套架 6-滑輪 7-壓板 8、9-觸點 10-橫板
滾輪式行程開關又分為單滾輪自動復位和雙滾輪(羊角式)非自動復位式,雙滾輪行移開關具有兩個穩態位置,有“記憶”作用,在某些情況下可以簡化線路。
(3)微動開關式行程開關
其結構如圖5-5所示:
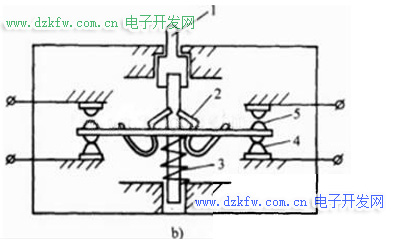
圖5-5 微動式行程開關
1.推桿 2.彈簧 3.壓縮彈簧4.動斷觸點 5.動合觸點
4.3.3 行程開關用途
行程開關主要用于將機械位移轉變成電信號,使電動機的運行狀態得以改變,從而控制機械動作或用作程序控制。
行程開關真正的用武之地是在工業上,在那里它與其它設備配合,組成更復雜的自動化設備。
機床上有很多這樣的行程開關,用它控制工件運動或自動進刀的行程,避免發生碰撞事故。有時利用行程開關使被控物體在規定的兩個位置之間自動換向,從而得到不斷的往復運動。比如自動運料的小車到達終點碰著行程開關,接通了翻車機構,就把車里的物料翻倒出來,并且退回到起點。到達起點之后又碰著起點的行程開關,把裝料機構的電路接通,開始自動裝車。總是這樣下去,就成了一套自動生產線,用不著人管,日以繼夜地工作,節省了人的體力勞動。
5 基于PLC的停車場車位控制系統概述5.1課 題 內 容
基于PLC的停車場車位控制系統技術要求
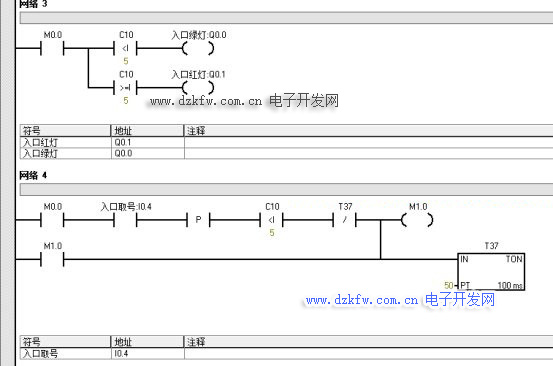
(1)停車場只永許停5輛車,當少于5輛車時,入口初綠燈亮,左欄桿抬起,司機取號(一次性)進入,5秒后,左欄桿落下達到5輛車,紅燈亮,左欄桿不會抬起,取車時出示號碼,右欄桿抬起,車輛離開后5秒后,右欄桿落下(注意:停車場的車輛數=入口車輛數-出口車輛數)。
(2)車輛進入停車場后,自動按號碼排放車輛。
(3)當一個車位工作時,其他車位不永許工作。
(4)4電機容量:2.2KW,2級;0.75KW,2級。
5.2設計目標及原則5.2.1目標
(1)方便、快捷、準確的滿位顯示服務功能;
(2)車輛保管的安全性功能;
(3)經濟合理的運營成本;
5.2.2原則
(1) 先進成熟的技術和設備,保證系統運作安全、可靠與穩定;
(2) 合理布局,提高系統的服務質量,縮短服務時間;
(3) 實用性、實時性、完整性原則;
(4) 可擴展性及易維護性原則。
5.3課題要求5.3.1控制系統的I/O分配及器件選型
根據控制系統的控制要求,確定I/O分配,并配置相應的PLC模塊。根據控制要求及I/O分配,畫出控制系統接線圖。
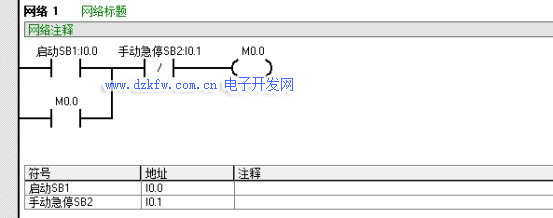
5.3.2 程序的編制根據系統的控制要求,編制程序。
系統調試
(1)根據控制系統的控制要求,畫出控制系統接線圖。
(2)輸入程序,將設計的程序正確輸入PLC中。
(3)模擬調試,進行模擬調試,觀察PLC控制程序是否有明顯不合理的情況,如有,修改PLC控制程序直至調試通過。
(4)系統調試,進行系統調試,觀察設備能否按控制要求運行,否則,檢查系統接線、參數設定、PLC程序,直至設備按控制要求運行。
5.4系統工作過程
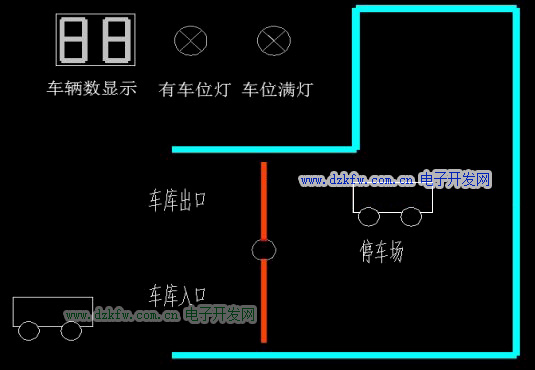
圖6-1停車場
(1)車庫啟用時,先對所有用到的存儲單元清零,并應有車庫空顯示;
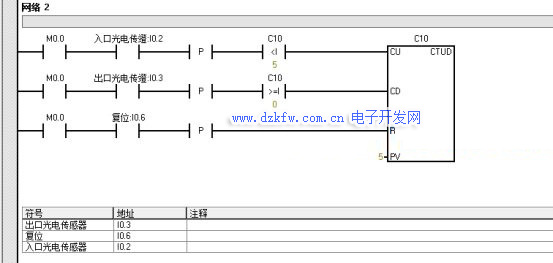
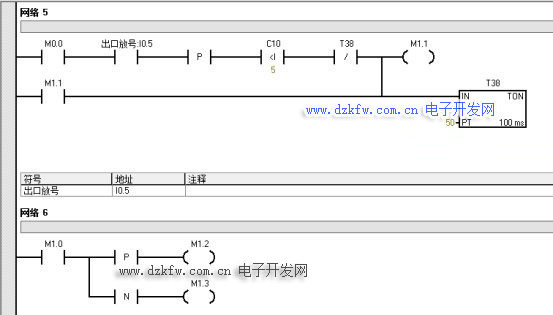
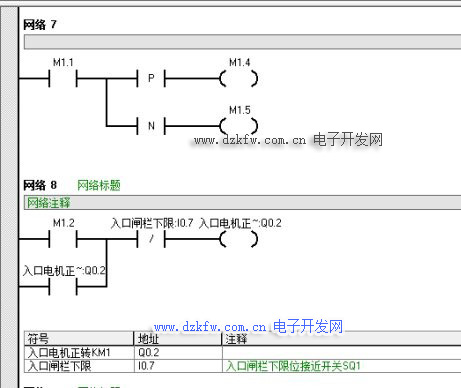
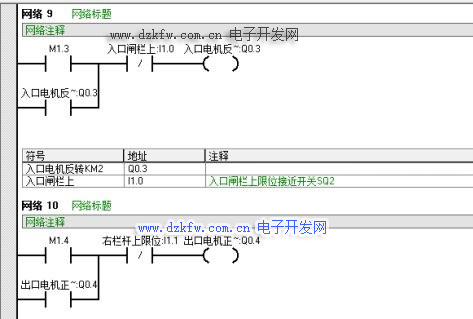
(2)入庫車輛前進時,經過入口光電傳感器,此時車位尚未滿的話,入口光電傳感器將信號送給電動機控制電動機正轉,柵欄向上打開,當達到上限位置時,柵欄打開停止,同時定時器T38開始定時5秒,定時器T38定時到將T38信號送給電動機控制電動機反轉,柵欄向下關閉,當達到下限位置時,柵欄門停止動作;另外,入口光電傳感器將信號送給加減計數器C10,加減計數器C10加1,并將加減計數器C10的差值信號實時傳給七段數碼顯示屏;
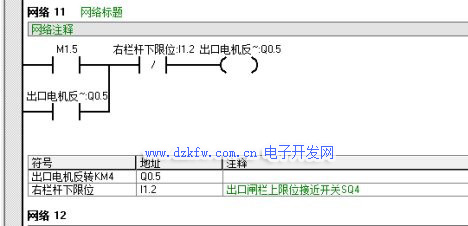
(3)出庫時,經過出口光電傳感器,出口光電傳感器將信號送給電動機控制電動機正轉,柵欄門向上打開,當達到上限的時候,柵欄停止打開,同時定時器T39開始定時計時5秒,定時器T39定時到將T39信號送給電動機控制電動機反轉,柵欄向下關閉,當達到下限位時,柵欄門停止動作;另外,出口光電傳感器將信號送給加減計數器C10,加減計數器C10加1,并將加減計數器C10信號實時傳給七段數碼顯示屏;
(4)若設車庫容量為4輛車,則車庫滿時應報警并顯示。
5.5控制程序流程圖
控制系統程序流程圖如下:
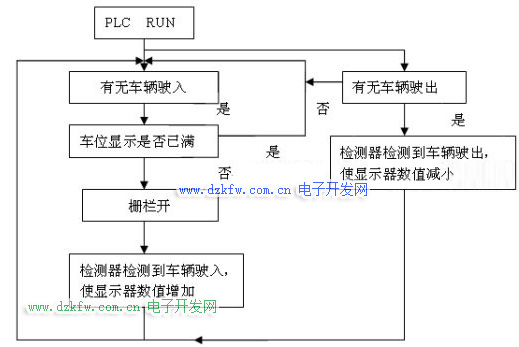
圖6-2 程序流程圖
5.6系統硬件電路設計5.6.1 CPU的選擇
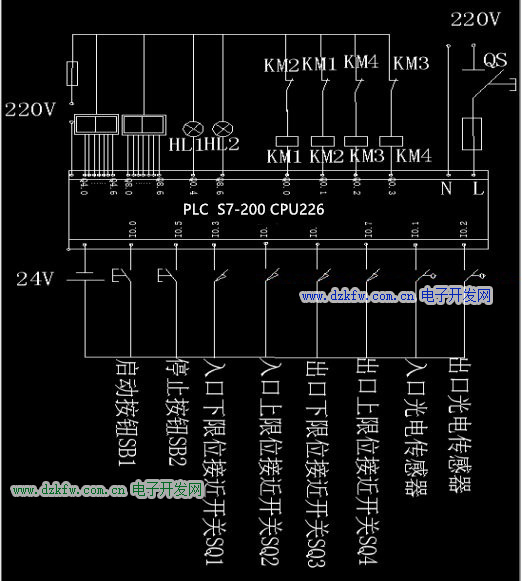
本次設計要求開始、停止、4個行程開關和2個傳感器共10個輸入接口,控制車滿和有位2個指示燈、電機正反轉及2個七段顯示屏共20輸出接口,所以選用CPU314。
5.6.2 I/O地址分配
停車場車位系統輸入開關及控制該系統的輸出端在PLC中的I/O地址分配表如下表所示。
表6-1 I/O地址分配表
|
控制信號 |
信號名稱 |
地址編碼 |
|
輸
入
信
號 |
啟動SB1 |
I0.0 |
|
手動急停SB2 |
I0.1 | |
|
入口光電傳感器 |
I0.2 | |
|
出口光電傳感器 |
I0.3 | |
|
入口取號 |
I0.4 | |
|
出口放號 |
I0.5 | |
|
復位 |
I0.6 | |
|
入口閘欄下限 |
I0.7 | |
|
入口閘欄上 |
I1.0 | |
|
右欄桿上限位 |
I1.1 | |
|
右欄桿下限位 |
I1.2 | |
|
輸
出
信
號 |
入口綠燈 |
Q0.0 |
|
入口紅燈 |
Q0.1 | |
|
入口電機正轉KM1 |
Q0.2 | |
|
入口電機反轉KM2 |
Q0.3 | |
|
出口電機正轉KM3 |
Q0.4 | |
|
出口電機反轉KM4 |
Q0.5 | |
5.6.3 I/O接線圖
結束語
從這次畢業設計中,我更加看清了自己的不足之處。為了搞好這次畢業設計,通過查閱資料以及在老師和同學的幫助下,最終基本達到了設計目的。通過實踐,鞏固了理論知識的學習,提高了實際應用所學知識的能力,還積累了許多寶貴的經驗。在這次的設計實踐過程中,我認識到不管做什么事,尤其是科學實踐,都需要大膽假設,小心求證。任何一個方案都要經過詳細周全的論證后才能著手去做,否則即使很快做出來,但經不起推敲和考驗。對于那些要求能夠擴展功能的課題更是如此。
在設計過程中,總是遇到這樣或那樣的問題。有時發現一個問題的時候,需要做大量的工作,花大量的時間才能解決。自然而然,我的耐心便在其中建立起來了。為以后的工作積累了經驗,增強了信心。
通過這次課程設計,我發現了我的理論知識掌握的不是特別好,而且很多方面掌握的都不到位,我們還需要大量的以前沒有學到過的知識,于是圖書館和網路成了我們很好的助手。在查閱資料的過程中,我們要判斷優劣、取舍相關知識,不知不覺中我們查閱資料的能力也得到了很好的鍛煉。我們學整個設計通過軟件和硬件上的調試。我想對自己以后的學習和工作都有很大的幫助。在課程設計中遇到了很多實際性的問題,在實際設計中才發現,只有理論與實際相結合,才能更加深入的了解問題。
只有了解了實際與理論知識并把它們相結合,才能解決問題。一切問題必須靠自己一點一滴的解決,而且要不斷的更正以前的錯誤。設計是比較簡單的,主要是解決程序設計中的問題,而程序設計是一個很靈活的東西,它反映了你解決問題的邏輯思維和創新能力,它才是一個設計的靈魂所在。因此大部分時間是用在程序設計上面的。
通過這次對停車場車位控制的PLC控制,讓我了解了PLC梯形圖、指令表、外部接線圖有了更好的了解,也讓我了解了關于PLC設計原理。有很多設計理念來源于實際,從中找出最適合的設計方法。
致謝
經過半學期的忙碌和工作,本次畢業設計已經接近尾聲,作為一個本科生的畢業設計,由于經驗的匱乏,難免有許多考慮不周全的地方,在畢業設計期間,無論是確定設計選題、收集資料,程序設計、撰寫論文,我都得到了xxx老師的全力幫助和耐心指導。張老師學識淵博、治學嚴謹、平易近人,是我們學習和生活的榜樣,在此我特向xxx老師表示最崇高的敬意和由衷的感謝。如果沒有xxx老師的督促指導,以及一起工作的同學們的支持,想要完成這個設計是難以想象的。
在這里首先要感謝我的指導老師。老師平日里工作繁多,但他會花很長時間來和我們探討一些問題,非常耐心。在我做畢業設計的每個階段,從查閱資料到設計草案的確定和修改,期間檢查,程序編寫等整個過程中,老師都給予了我悉心的指導。除了敬佩老師的專業水平外,他的治學嚴謹的精神也是我永遠學習的榜樣,并將積極影響我今后的學習和工作。
其次要非常感謝大學四年來所有老師的悉心輔導,使我們不再停滯在專業門檻的外面;使我們從理論到實踐更深刻地認識了電氣專業的方向性、實用性和前沿性。同時還要感謝所有的同學們,正是因為有了你們的支持和鼓勵,此次畢業設計才會順利完成。
最后再次感謝學院四年來對我的大力栽培,有多少可敬的師長、同學、朋友給了我無言的幫助,在這里請接受我誠摯的謝意!
附錄
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底