
一、動作分析
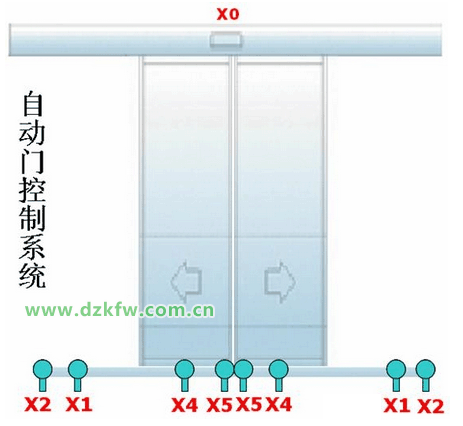
人靠近自動門時,感應器X0為ON,Y0驅動電動機高速開門,碰到開門減速開關X1時,變為低速開門。碰到開門極限開關X2時電動機停轉,開始延時。若在0.5s內感應器檢測到無人,Y2起動電動機高速關門。碰到關門減速開關X4時,改為低速關門,碰到關門極限開關X5時電動機停轉。在關門期間若感應器檢測到有人,停止關門,T1延時0.5s后自動轉換為高速開門。
二、硬件設計
根據前面的學習,再依據圖中的標示,同學們可以自己畫出輸入及輸出端口的分配,在這不加深述
三、順序功能圖的繪制

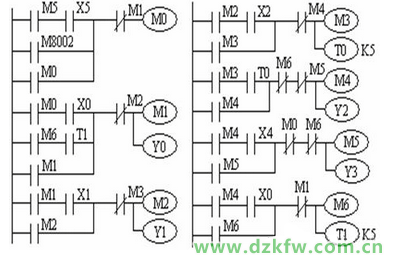
四、三菱plc自動門控制系統編程梯形圖
1、選擇序列起-保-停電路編程
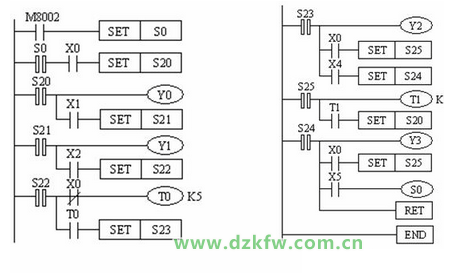
2、選擇序列結構的步進指令編程
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底