

任務
某設備上有一套伺服驅動系統,伺服驅動器的型號為MR-J2S,伺服電動機的型號為HF-KE13W1-S100,是三相交流同步伺服電動機,要求:壓下按鈕SB1時,伺服電動機帶動系統X方向移動,碰到SQ1停止,壓下按鈕SB3時,伺服電動機帶動系統X負方向移動,碰到SQ2時停止,X方向靠近接近開關SQ2時停止,當壓下SB2和SB4,伺服系統停機。
所需主要軟硬件配置
① 1套GX DEVELOPER V8.86;
② 1臺伺服電動機,型號為HF-KE13W1-S100;
③ 1臺伺服驅動器的型號為MR-J2S;
④ 1臺FX2N-32MT PLC。
所需編程——指令高速脈沖輸出指令
高速脈沖輸出功能即在PLC的指定輸出點上實現脈沖輸出和脈寬調制功能。FX系列PLC配有兩個高速輸出點(從FX3U開始有3個高速輸出點)。脈沖輸出指令(PLSY/DPLSY)的PLS指令格式見下表。

脈沖輸出指令(PLSY/DPLSY)按照給定的脈沖個數和周期輸出一串方波(占空比50%,如下圖1-1所示)。該指令可用于指定頻率、產生定量脈沖輸出場合,實例如圖1-2所示,[S1·]用于指定頻率,范圍是2~20kHz;[S2·]用于指定產生脈沖的數量,16位指令(PLSY)的指定范圍是1~32767,32位指令(DPLSY)的指定范圍是1~2147483647,[D·]用于指定輸出的Y的地址,僅限于晶體管輸出的Y000和Y001(對于FX2N及以前的產品)。當X1閉 合時,Y000發出高速脈沖,當X1斷開時,Y000停止輸出。輸出脈沖存儲在D8137和 D8136中。

圖1-1 脈沖串輸出
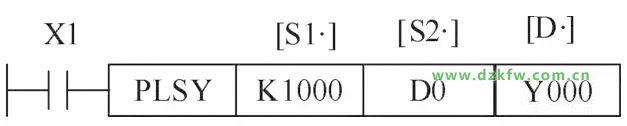
圖1-2 PLSY的使用示例
所需設備接線
伺服系統選用的是三菱MR系列,伺服電動機和伺服驅動器的連線比較簡單,伺服電動機后面的編碼器與伺服驅動器的連線是由三菱公司提供專用電纜,伺服驅動器端的接口是CN2,這根電纜一般不會接錯。伺服電動機上的電源線對應連接到伺服驅動器上的接線端子上,接線圖如圖1-3所示。
本伺服驅動器的供電電源可以是三相交流230V,也可以是單相交流230V,本例采用單相交流230V供電,伺服驅動器的供電接線端子排是CNP1。PLC的高速輸出點與伺服的PP端子連接,PLC的輸出和伺服驅動器的輸入都是NPN型,因此是匹配的。PLC的COM1必須和伺服驅動器的SG連接,達到共地的目的。
需要指出的是若不使用中間繼電器KA1、KA2、KA3,也是可行的,可直接將PLC的Y2、Y3、Y4與伺服驅動器的3、4、5接線端子相連。
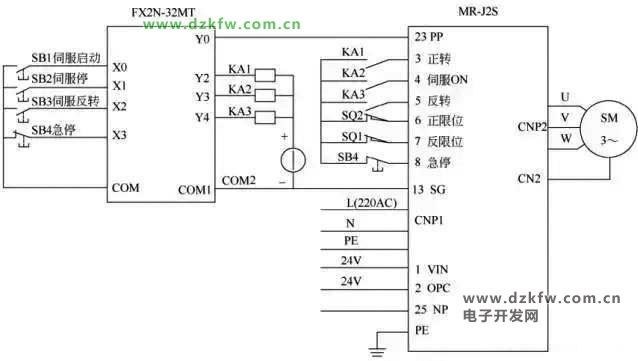
圖1-3 硬件接線圖
所需參數設定——伺服驅動器
用PLC的高速輸出點控制伺服電動機,除了接線比用PLC的高速輸出點控制步進電動機復雜外,后者不需要設置參數(細分的設置除外),而要伺服系統正常運行,必須對伺服系統進行必要的參數設置。參數設置如下:
① P0=0000,含義是位置控制,不進行再生制動;
② P3=100,含義是齒輪比的分子;
③ P4=1,含義是齒輪比的分母;
④ P41=0,含義是伺服ON、正行程限位和反行程限位都通過外部信號輸入。
雖然伺服驅動器的參數很多,但對于簡單的應用,只需要調整以上幾個參數就足夠了。
【關鍵點】
1、連線時,務必注意PLC與伺服驅動器必須共地,否則不能形成回路;此外,三菱的伺服驅動器只能接受NPN信號,因此在選擇PLC時,要注意選用NPN輸出的PLC。
2、為伺服電機設置完成以上參數后,不要忘記保存參數,伺服驅動器斷電后,以上設置才起作用。
此外,有的初學者編寫程序時輸入的脈沖數較少,而且齒輪比P3/P4又很小,發現系統運行后,伺服電動機并未轉動,從而不知所措,其實伺服電動機已經旋轉,只不過肉眼沒有發現其轉動,只要把輸入的脈沖數增加到足夠大,將齒輪比調大一些,就能發現伺服電動機旋轉。
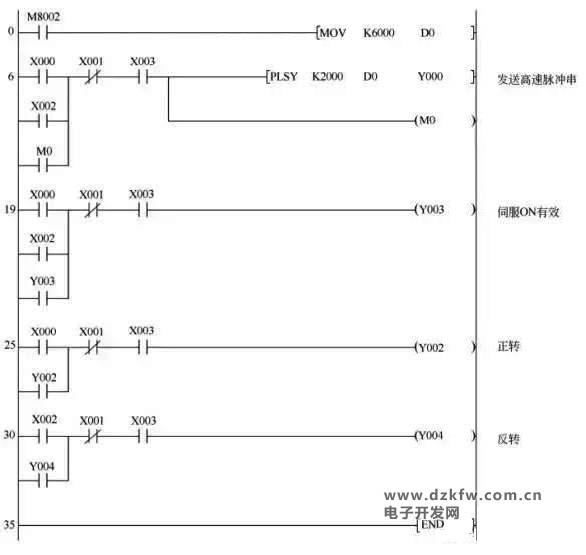
所需程序
如下圖:
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底