
一、問(wèn)題的提出
由電機(jī)及拖動(dòng)基礎(chǔ)可知,三相交流異步電動(dòng)機(jī)起動(dòng)時(shí)電流較大,一般是額定電流的( 5 ~ 7 )倍。故對(duì)于功率較大的電動(dòng)機(jī),應(yīng)采用降壓起動(dòng)方式, Y/ △降壓起動(dòng)是常用的方法之一。
起動(dòng)時(shí),定子繞組首先接成星形,待轉(zhuǎn)速上升到接近額定轉(zhuǎn)速時(shí),再將定子繞組的接線換成三角形,電動(dòng)機(jī)便進(jìn)入全電壓正常運(yùn)行狀態(tài)。圖 1(a),(b)為繼電器—接觸器實(shí)現(xiàn)的 Y/ △降壓控制電路。
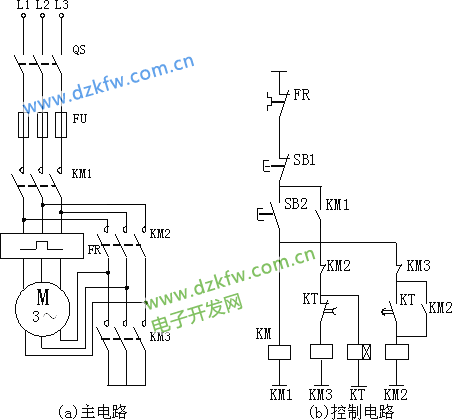
圖 1 三相異步電動(dòng)機(jī)Y/△降壓起動(dòng)控制電路
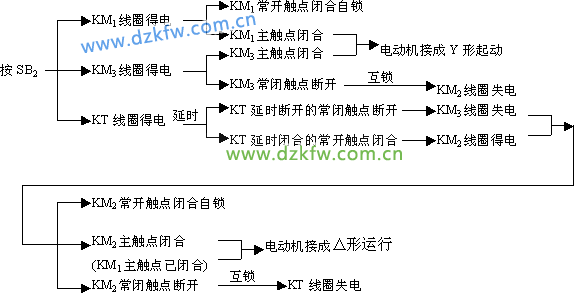
它是根據(jù)起動(dòng)過(guò)程中的時(shí)間變化,利用時(shí)間繼電器來(lái)控制 Y/ △的換接的。由( a)圖知,工作時(shí),首先合上刀開(kāi)關(guān)QS,當(dāng)接觸器KM 1 及KM 3 接通時(shí),電動(dòng)機(jī)Y形起動(dòng)。當(dāng)接觸器KM 1 及KM 2 接通時(shí),電動(dòng)機(jī)△形運(yùn)行。圖(b)為控制電路,其工作過(guò)程分析如下:
線路中 KM 2 和KM 3 的常閉觸點(diǎn)構(gòu)成電氣互鎖,保證電動(dòng)機(jī)繞組只能接成一種形式,即Y形或△形,以防止同時(shí)連接成Y形及△形而造成電源短路。
二、硬件配置
本模塊所需的硬件及輸入 /輸出端口分配如圖2所示。由圖可見(jiàn):本模塊除可編程控制器之外,還增添了部分器件,其中,SB 1 為停止按鈕,SB 2 為起動(dòng)按鈕,F(xiàn)R為熱繼電器的常開(kāi)觸點(diǎn),KM 1 為主電源接觸器,KM 2 為△形運(yùn)行接觸器,KM 3 為Y形起動(dòng)接觸器。
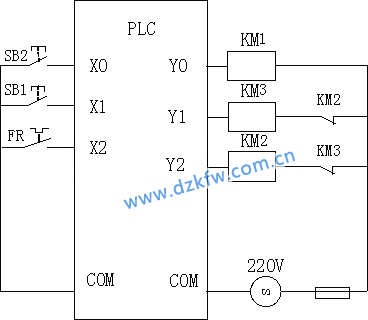
圖 2 輸入/輸出接線圖
三、軟件設(shè)計(jì)
本模塊的軟件設(shè)計(jì)除應(yīng)用前述的部分基本指令及軟元件之外,還新增軟元件輔助繼電器 M100及定時(shí)器T 0 ,新增主控觸點(diǎn)指令MC、MCR。可編程控制的梯形圖及指令表如圖3所示。
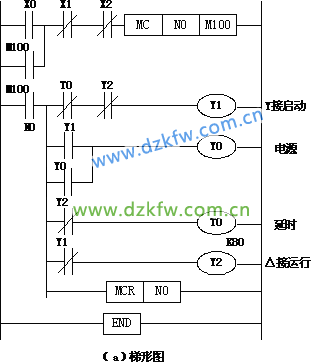
工作過(guò)程分析如下:按下啟動(dòng)按鈕 SB 2 時(shí),輸入繼電器X0的常開(kāi)觸點(diǎn)閉合,并通過(guò)主控觸點(diǎn)(M100常開(kāi)觸點(diǎn))自鎖,輸出繼電器Y1接通,接觸器KM 3 得電吸合,接著Y0接通,接觸器KM1得電吸合,電動(dòng)機(jī)在Y形接線方式下起動(dòng);同時(shí)定時(shí)器T 0 開(kāi)始計(jì)時(shí),延時(shí)8秒后T 0 動(dòng)作,使Y1斷開(kāi),Y1斷開(kāi)后,KM 3 失電,互鎖解除,使輸出繼電器Y2接通,接觸器KM2得電,電動(dòng)機(jī)在△形接線方式下運(yùn)行。
 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底