
一、功能指令
1)概述
功能指令實際上就是一個個具有不同功能且被封裝好的函數(shù)塊,功能指令的利用不僅提高了編程效率,還拓寬了PLC的應(yīng)用范圍。
2)格式和執(zhí)行方式
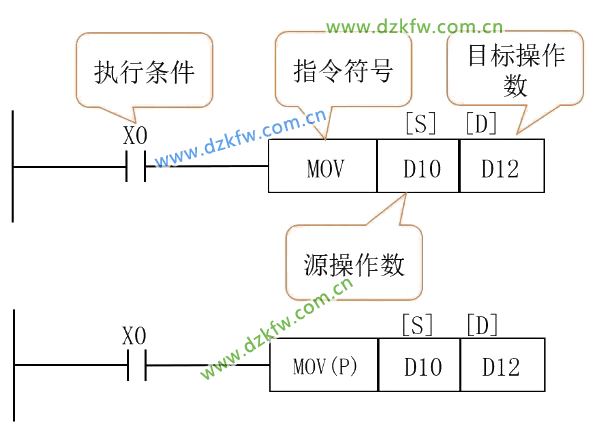
功能指令一般由執(zhí)行條件、指令符號和操作數(shù)三部分組成。可以選擇連續(xù)執(zhí)行和脈沖執(zhí)行,選擇脈沖執(zhí)行時需要在指令符號后加(P),表示檢測到執(zhí)行條件(X0)的上升沿時執(zhí)行一次;連續(xù)執(zhí)行則表示當(dāng)X0為ON狀態(tài)時一直執(zhí)行。
處理32位數(shù)據(jù)時需要在指令符號前加(D)。
用MOV指令完成任務(wù),要了解MOV指令使用的格式:

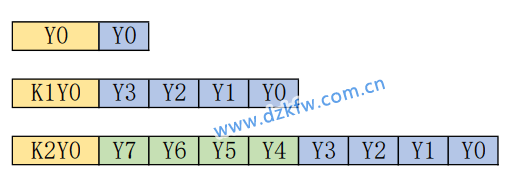
注釋:K表示十進(jìn)制常數(shù);H表示十六進(jìn)制常數(shù);KnX… KnS以K1Y000進(jìn)行說明:K1Y000表示以Y0為開始的連續(xù)4*1個位,即Y0,Y1,Y2,Y3; T表示定時器;C表示計數(shù)器;D表示數(shù)據(jù)寄存器;V/Z表示變址寄存器。
例如:K1Y000表示Y000~Y003(4個),如果是K2Y000則表示Y000~Y007(8個)以此類推。
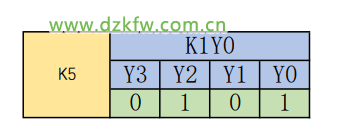
指令意思:k2變成0010然后放入Y003~Y000,即Y003=Y002=Y000=0,Y001=1
3)數(shù)據(jù)格式
a)位元件和字符件
只處理0/1的軟組件稱為位元件,如X、Y、M、S等。處理數(shù)字?jǐn)?shù)據(jù)的組件稱為字符件,如T、C、D等。一個字符件由16位的存儲單元組成,其中最高位(第15位)為符號位,第0~14位為數(shù)值位。
b)位元件的組合
位元件組合起來也可以表示數(shù)字?jǐn)?shù)據(jù)。每4個位元件為一組,通常在起始的軟組件前加Kn,n為組數(shù)。16位數(shù)操作時可取K1-K4,32為操作數(shù)時可取K1-K8。
二、傳送指令(MOV)
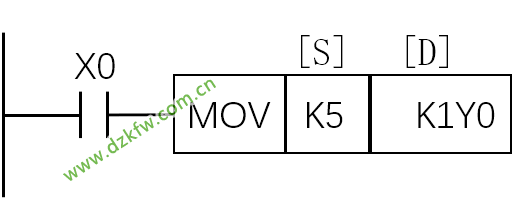
該指令的功能是將源操作數(shù)傳送到指定的目標(biāo)操作數(shù)。當(dāng)執(zhí)行條件為ON時,該指令執(zhí)行;當(dāng)執(zhí)行條件為OFF時,該指令不執(zhí)行,數(shù)據(jù)保持不變。下圖表示將常數(shù)5傳入到位元件組K1Y0中,在傳入時常數(shù)5會自動轉(zhuǎn)換為二進(jìn)制數(shù)。
執(zhí)行結(jié)果為
三、指令運用
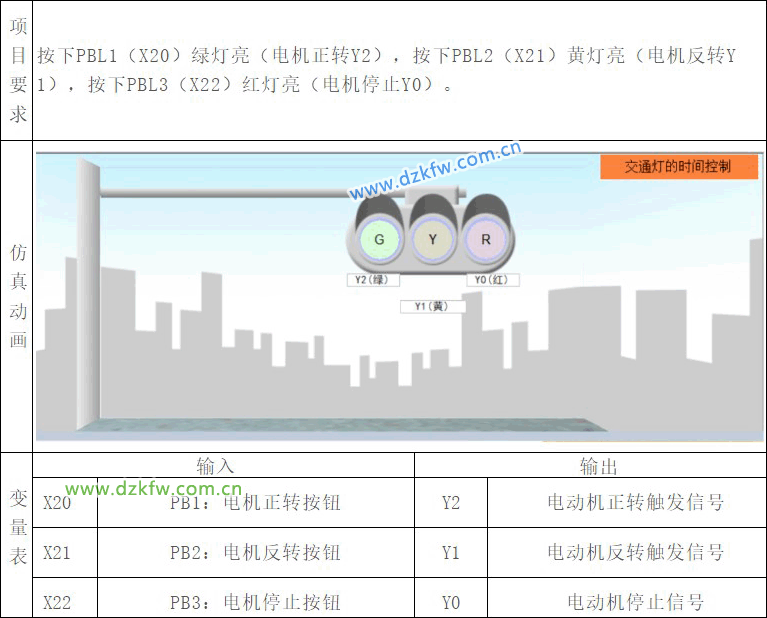
利用傳送指令(MOV)實現(xiàn)電機(jī)的正反轉(zhuǎn)控制。
1)確定變量表
進(jìn)入項目后,根據(jù)項目要求和仿真動畫確定各個元件所對應(yīng)的I/O地址。
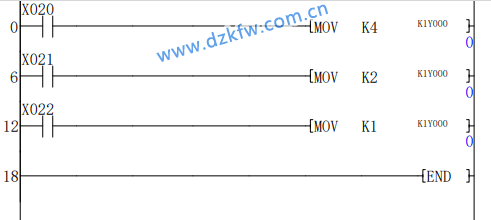
2)編輯程序
| 程序段1:電動機(jī)正轉(zhuǎn)按下PB1將常數(shù)4傳入位元件組K1Y0中,使Y2為ON。電動機(jī)正轉(zhuǎn)的條件為:Y3為0,Y2為1,Y1為0,Y0為0。即對應(yīng)的二進(jìn)制數(shù)為:0100,轉(zhuǎn)換為十進(jìn)制則為:4。傳送指令輸入方式:MOV(空格)K4(空格)K1Y0
![]()
|程序段2:電動機(jī)反轉(zhuǎn)按下PB2將常數(shù)2傳入位元件組K1Y0中,使Y1為ON。電動機(jī)正轉(zhuǎn)的條件為:Y3為0,Y2為0,Y1為1,Y0為0。即對應(yīng)的二進(jìn)制數(shù)為:0010,轉(zhuǎn)換為十進(jìn)制則為:2。

|程序段3:電動機(jī)停止按下PB3將常數(shù)1傳入位元件組K1Y0中,使Y0為ON。電動機(jī)正轉(zhuǎn)的條件為:Y3為0,Y2為0,Y1為0,Y0為1。即對應(yīng)的二進(jìn)制數(shù)為:0001,轉(zhuǎn)換為十進(jìn)制則為:1。

程序整體瀏覽
3)程序測試

 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底