
1. 設計任務與要求
用 PLC 對步進電機進行控制。實現調速、正反轉換向。
2. 實驗設備
| 設備 | 型號 |
|---|---|
| PLC |
CF2N-20MT 注:CF2N-20MT替代FX1S-20MT |
| 步進電機驅動器 | HB420 0.25-2A DC12-36V |
| 步進電機 | 42BYG250-40 0.4N.m |

3. 實驗原理
硬件:
控制步進脈沖信號,可實現變速;
控制方向控制信號,可實現正反轉。
軟件:
PLC 中 PLSY 指令的使用
關于這部分網上已有不少資料,建議自行百度搞懂原理
4. 控制方案
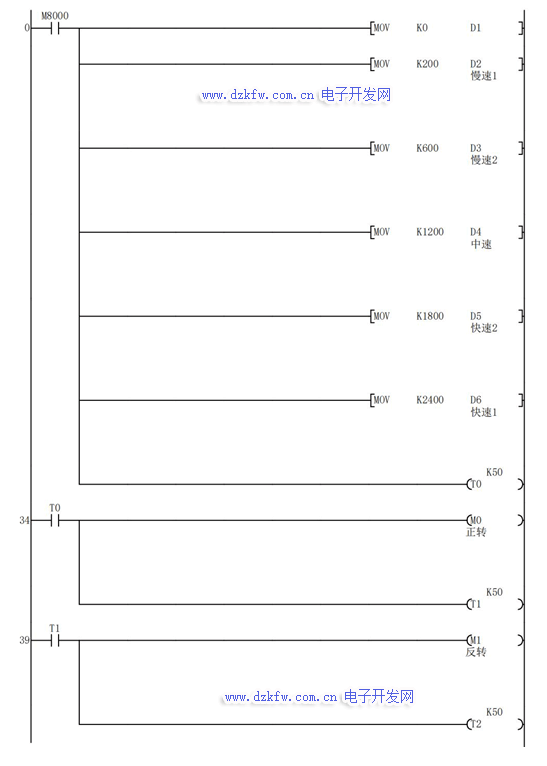
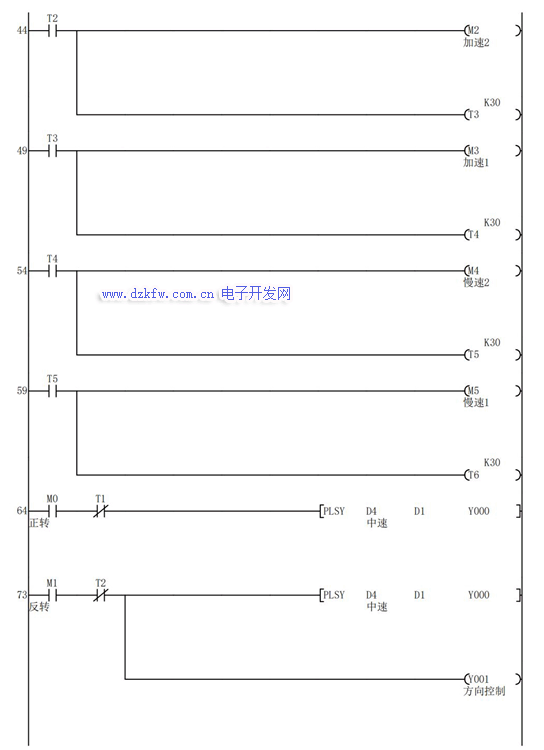
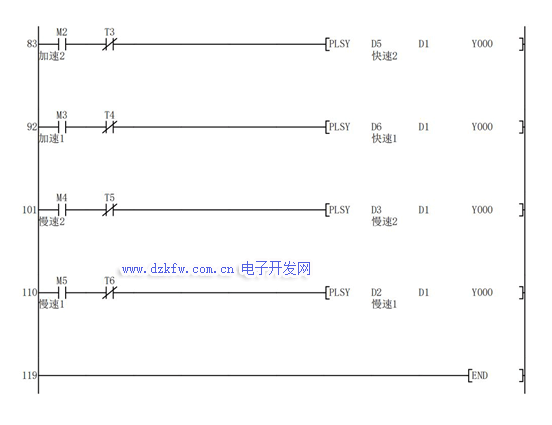
PLC開機→5s后電機開始以1200Hz(中速)的脈沖頻率正轉→經過5s后,以1200Hz的脈沖頻率反轉→經過5s后,以1800Hz(加速2檔)的脈沖頻率轉→經過3s后,以2400Hz(加速1檔)的脈沖頻率轉→經過3s后,以600Hz(慢速2檔)的脈沖頻率轉→經過3s后,以200Hz(慢速1檔)的脈沖頻率轉→經過3s后,電機停止轉動
5. 硬件連接
電機驅動 VDC- —— PLC GND
電機驅動 VDC+ —— 電機驅動 VCC+
電機驅動 A+ —— 電機 紅線
電機驅動 A- —— 電機 藍線
電機驅動 B+ —— 電機 綠線
電機驅動 B- —— 電機 黑線
電機驅動 PLS- —— PLC Y0
電機驅動 DIR- —— PLC Y1
電機驅動 VCC+ —— PLC 24V
6. 梯形圖
7. 補充說明
- PLC與步進驅動器之間應串聯一只2KΩ電阻
PLC不能直接與步進驅動器相連接,因為步進驅動器的控制信號是+5V,而三菱 PLC 的輸出信號通常是+24V,電壓不匹配的。解決方法就是在PLC與步進驅動器之間串聯一只2KΩ電阻,起分壓作用。
-
PLSY 指令第2個參數S2.(輸出脈沖個數)設為0
S2. 設為0,表示輸出無窮多脈沖,則執行該指令時,電機會一直轉 -
調速時注意脈沖頻率范圍
根據實際電機的參數,設置PLSY 指令第1個參數S1.(輸出脈沖頻率)
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底