

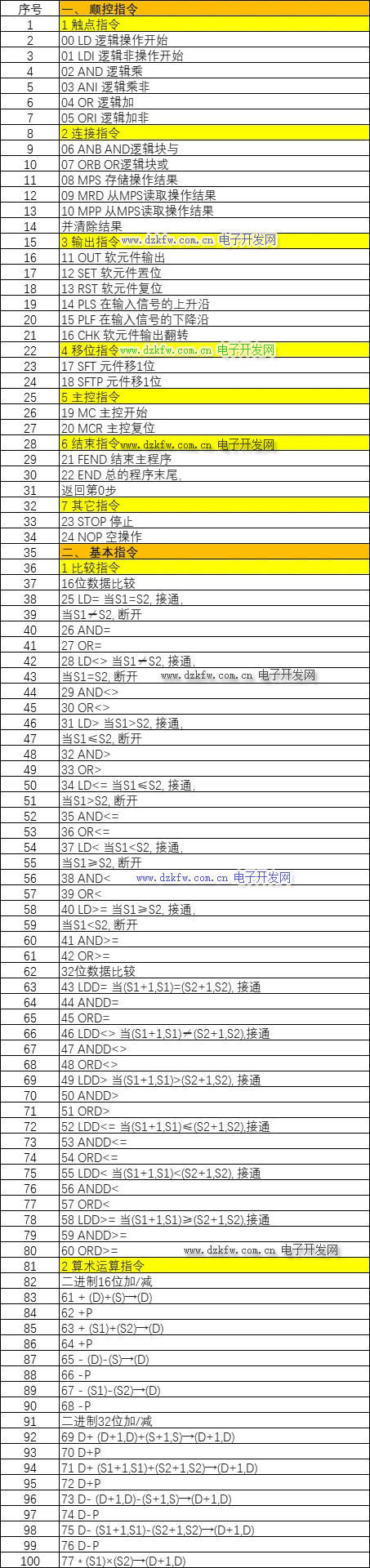
一、 順控指令
1 觸點指令
00 LD 邏輯操作開始
01 LDI 邏輯非操作開始
02 AND 邏輯乘
03 ANI 邏輯乘非
04 OR 邏輯加
05 ORI 邏輯加非
2 連接指令
06 ANB AND邏輯塊與
07 ORB OR邏輯塊或
08 MPS 存儲操作結果
09 MRD 從MPS讀取操作結果
10 MPP 從MPS讀取操作結果
并清除結果
3 輸出指令
11 OUT 軟元件輸出
12 SET 軟元件置位
13 RST 軟元件復位
14 PLS 在輸入信號的上升沿
15 PLF 在輸入信號的下降沿
16 CHK 軟元件輸出翻轉
4 移位指令
17 SFT 元件移1位
18 SFTP 元件移1位
5 主控指令
19 MC 主控開始
20 MCR 主控復位
6 結束指令
21 FEND 結束主程序
22 END 總的程序末尾,
返回第0步
7 其它指令
23 STOP 停止
24 NOP 空操作
二 基本指令
1 比較指令
16位數據比較
25 LD= 當S1=S2, 接通,
當S1≠S2, 斷開
26 AND=
27 OR=
28 LD<> 當S1≠S2, 接通,
當S1=S2, 斷開
29 AND<>
30 OR<>
31 LD> 當S1>S2, 接通,
當S1≤S2, 斷開
32 AND>
33 OR>
34 LD<= 當S1≤S2, 接通,
當S1>S2, 斷開
35 AND<=
36 OR<=
37 LD< 當S1接通,
當S1≥S2, 斷開
38 AND<
39 OR<
40 LD>= 當S1≥S2, 接通,
當S1斷開
41 AND>=
42 OR>=
32位數據比較
43 LDD= 當(S1+1,S1)=(S2+1,S2), 接通
44 ANDD=
45 ORD=
46 LDD<> 當(S1+1,S1)≠(S2+1,S2),接通
47 ANDD<>
48 ORD<>
49 LDD> 當(S1+1,S1)>(S2+1,S2), 接通
50 ANDD>
51 ORD>
52 LDD<= 當(S1+1,S1)≤(S2+1,S2),接通
53 ANDD<=
54 ORD<=
55 LDD< 當(S1+1,S1)<(S2+1,S2), 接通
56 ANDD<
57 ORD<
58 LDD>= 當(S1+1,S1)≥(S2+1,S2),接通
59 ANDD>=
60 ORD>=
2 算術運算指令
二進制16位加/減
61 + (D)+(S)→(D)
62 +P
63 + (S1)+(S2)→(D)
64 +P
65 - (D)-(S)→(D)
66 -P
67 - (S1)-(S2)→(D)
68 -P
二進制32位加/減
69 D+ (D+1,D)+(S+1,S)→(D+1,D)
70 D+P
71 D+ (S1+1,S1)+(S2+1,S2)→(D+1,D)
72 D+P
73 D- (D+1,D)-(S+1,S)→(D+1,D)
74 D-P
75 D- (S1+1,S1)-(S2+1,S2)→(D+1,D)
76 D-P
77 * (S1)×(S2)→(D+1,D)
78 *P
79 / (S1)/(S2)→商(D), 余數(D+1)
80 /P
81 D* (S1+1,S1)×(S2+1,S2)→
(D+3,D+2,D+1,D)
82 D*P
83 D/ (S1+1,S1)/(S2+1,S2)→
商(D+1,D),余數(D+3,D+2)
84 D/P
85 B+ (D)+(S)→(D)
86 B+P
87 B+ (S1)+(S2)→(D)
88 B+P
89 B- (D)-(S)→(D)
90 B-P
91 B- (S1)-(S2)→(D)
92 B-P
93 DB+ (D+1,D)+(S+1,S) →(D+1,D)
94 DB+P
95 DB+ (S1+1,S1)+(S2+1,S2)→(D+1,D)
96 DB+P
97 DB- (D+1,D)-(S+1,S)→(D+1,D)
98 DB-P
99 DB- (S1+1,S1)-(S2+1,S2)→(D+1,D)
100 DB-P
101 B* (S1)×(S2)→(D+1,D)
102 B*P
103 B/ (S1)/(S2)→商(D),余數(D+1)
104 B/P
105 DB* (S1+1,S1)×(S2+1,S2)→
(D+3,D+2,D+1,D)
106 DB*P
107 DB/ (S1+1,S1)/(S2+1,S2)→
商(D+1,D),余數(D+3,D+2)
108 DB/P
109 INC (D)+1→(D)
110 INCP
111 DINC (D+1,D)+1→(D+1,D)
112 DINCP
113 DEC (D)-1→(D)
114 DECP
115 DDEC (D+1,D)-1→(D+1,D)
116 DDECP
3 BCD—二進制轉換
117 BCD (S)→(D)BCD轉換
118 BCDP
119 DBCD (S+1,S)→(D+1,D)
120 DBCDP
121 BIN (S)→(D)二進制轉換
122 BINP
123 DBIN (S+1,S)→(D+1,D)
124 DBINP
4 數據傳送指令
125 MOV (S)→(D)
126 MOVP
127 DMOV (S+1,S)→(D+1,D)
128 DMOVP
129 CML (S)→(D)
130 CMLP
131 DCML (S+1,S)→(D+1,D)
132 DCML
133 DCMLP
134 BMOV (S)→(D)n個
135 BMOVP
136 FMOV (S)→(D)n個
137 FMOVP
138 XCH (D1)←→(D2)
139 XCHP
140 DXCH (D1+1,D1)←→(D2+1,D2)
141 DXCHP
5 程序分支指令
142 CJ 條件滿足,跳轉到P**處
143 SCJ 條件滿足后緊接的掃描周期,
跳轉到P**處
144 JMP 無條件跳轉到P**處
145 CALL 執行P**處子程序
146 CALLP
147 RET 從子程序返回
148 EI 允許中斷
149 DI 禁止中斷
150 IRET 從中斷程序返回
151 SUB 執行n指定的程序
152 SUBP
6 程序切換指令
153 CHG 在主副程序間切換
7 刷新指令
154 COM 執行通訊刷新
155 EI 允許通訊刷新
156 DI 禁止通訊刷新
157 SEG 對應軟元件的刷新,僅執行1個掃描周期,M9052 ON時有效
三 應用指令
1 邏輯運算指令
158 WAND (D) AND (S)→(D)
159 WANDP
160 WAND (S1) AND (S2)→(D)
161 WANDP
162 DAND (D+1,D) AND (S+1,S)→(D+1,D)
163 DANDP
164 WOR (D) OR (S)→(D)
165 WORP
166 WOR (S1) OR (S2)→(D)
167 WORP
168 DOR (D+1,D) OR (S+1,S)→(D+1,D)
169 DORP
170 WXOR (D) XOR (S)→(D)異或
171 WXORP
172 WXOR (S1) XOR (S2)→(D)
173 WXORP
174 DXOR (D+1,D) XOR (S+1,S)→(D+1,D)
175 DXORP
176 WXNR (D) XOR (S)→(D)
177 WXNRP
178 WXNR (S1) XOR (S2)→(D)
179 WXNRP
180 DXNR (D+1,D) XOR (S+1,S)→(D+1,D)
181 DXNRP
182 NEG 0-(D)→(D)補碼
183 NEGP
2 旋轉指令
184 ROR n位右轉
185 RORP
186 RCR n位右轉(帶進位)
187 RCRP
188 ROL n位左轉
189 ROLP
190 RCL n位左轉(帶進位)
191 RCLP
192 DROR n位右轉
193 DRORP
194 DRCR n位右轉(帶進位)
195 DRCRP
196 DROL n位左轉
197 DROLP
198 DRCL n位左轉(帶進位)
199 DRCLP
3 移位指令
200 SFR n位右移
201 SFRP
202 SFL n位左移
203 SFLP
204 BSFR 1位右移
205 BSFRP
206 BSFL 1位左移
207 BSFLP
208 DSFR 1位右移
209 DSFRP
210 DSFL 1位左移
211 DSFLP
4 數據處理指令
212 SER 數據搜索
213 SERP
214 SUM 位檢查
215 SUMP
216 DSUM
217 DSUMP
218 DECO 譯碼編碼
219 DECOP
220 ENCO
221 ENCOP
222 SEG 7段編碼
223 BSET 對字中n位置位
224 BSETP
225 BRST 對字中n位復位
226 BRSTP
227 DIS 組合分離
228 DISP
229 UNI
230 UNIP
231 ASC ASCII轉化
5 先進先出指令
232 FIFW FIFO寫
233 FIFWP
234 FIFR FIFO讀
235 FIFRP
6 內存緩沖區存取指令
236 FROM 從特殊功能模塊讀取數據
237 FROMP
238 DFRO
239 DFROP
240 TO 向特殊功能模塊寫數據
241 TOP
242 DTO
243 FROM 從遠程I/O站讀數據
244 FROMP
245 DFRO
246 DFROP
247 TO 向遠程站寫數據
248 TOP
249 DTO
250 DTOP
7 FOR/NEXT指令
251 FOR 重復n次
252 NEXT
8 本地站、遠程I/O站存取指令
253 LRDP 從本地站讀數據
254 LWTP 向本地站寫數據
255 RFRP 從遠程特殊功能模塊讀數據
256 RTOP 向遠程特殊功能模塊寫數據
9 顯示指令
257 PR 從指定的8點字軟元件輸出
16個字符的ASCII碼
258 PR 順序向輸出模塊輸出ASCII
碼, 直到結束符NUL(00H)
259 PRC 將字軟元件的注釋轉換成
ASCII碼,并輸出
260 LED 將指定的8點字軟元件顯示
16個字符的ASCII碼
261 LEDA 顯示指定的英文數字字符
262 LEDB
263 LEDC 顯示軟元件S的注釋
264 LEDR 顯示復位
10 其它指令
265 WDT WDT復位
266 WDTP
267 CHK 故障檢測
268 SLT 按參數設定的條件,數據被鎖定
269 SLTR 狀態鎖存復位,且執行SLT
270 STRA 按參數設定的條件,采樣數據存入
271 STRAR 采樣跟蹤復位,且允許執行
272 STC 進位標志(M9012)ON
273 CLC 進位標志(M9012)OFF
274 DUTY 用戶定義時鐘
11 伺服指令
275 DSFRP 請求啟動伺服程序
276 PSFLP 數據修改
特殊繼電器和特殊寄存器
一 特殊繼電器M清單
M9000 熔絲斷
M9002 I/O組件校驗出錯
M9004 MINI網通訊出錯
M9005 AC電源掉電檢測
M9006 電池電壓低
M9007 電池電壓低鎖存
M9008 自診斷出錯
M9009 信號報警器檢測
M9010 運算出錯標志
M9011 運算出錯標志鎖存
M9012 進位標志
M9016 數據存儲區清零標志
M9017 數據存儲區清零標志
M9018 數據通訊監控切換
M9020 0號用戶定時時鐘
M9021 1號用戶定時時鐘
M9022 2號用戶定時時鐘
M9023 3號用戶定時時鐘
M9024 4號用戶定時時鐘
M9025 時鐘數據設置請求
M9026 時鐘數據出錯
M9027 時鐘數據顯示
M9028 時鐘數據讀請求
M9030 0.1秒時鐘
M9031 0.2秒時鐘
M9032 1秒時鐘
M9033 2秒時鐘
M9034 1分鐘時鐘
M9036 常開
M9037 常閉
M9038 RUN后第一個掃描周期ON
M9039 運行標志
M9040 暫停PAUSE允許線圈
M9041 PAUSE狀態觸點
M9042 停止狀態觸點
M9043 采樣跟蹤完成
M9044 采樣跟蹤
M9046 采樣跟蹤
M9047 采樣跟蹤準備
M9048 RUN LED閃爍標志
M9049 切換輸出字符數目
M9050 存放操作結果的存儲區交換觸點
M9051 CHG指令執行禁止
M9052 SEG指令切換
M9053 EI/DI指令切換
M9054 單步運行標志
M9055 狀態鎖存完成標志
M9056 主程序P, I設置請求
M9057 副程序P, I設置程序
M9060 副程序2P, I設置程序
M9061 副程序3P, I設置程序
M9060 遠程終端出錯
M9061 通訊出錯
M9065 分離傳送狀態
M9066 傳送處理切換
M9067 I/O組件出錯檢測
M9068 測試模式
M9069 線路故障時的輸出
M9073 WDT出錯標志
M9074 PCPU準備完成標志
M9075 測試模式標志
M9076 外部急停輸入標志
M9077 手動脈沖發生器軸設置錯誤標志
M9078 測試模式請求出錯標志
M9079 伺復程序設置出錯標志
M9081 對遠程模塊的通訊請求
M9082 最終站數不一致
M9084 出錯檢測
M9086 運行標志BASIC程序
M9087 暫停(PAUSE)標志
M9091 操作運行出錯細節標志
M9091 微機子程序調用出錯標志
M9092 雙電源模塊過熱
M9093 雙工電源模塊出錯
M9094 I/O改變標志
M9095 雙工運行校驗出錯
M9096 A3VCPU A自校出錯
M9097 A3VCPU B自校出錯
M9098 A3VCPU C自校出錯
M9099 A3VTU自校出錯
M9100 SFC程序登記
M9101 SFC程序起/停
M9102 SFC啟動狀態
M9103 連續步轉移有效/失效
M9104 連續轉移防止標志
M9108 步轉移監控定時器起始
(對應D9108)
M9109 步轉移監控定時器起始
(對應D9109)
M9110 步轉移監控定時器起始
(對應D9110)
M9111 步轉移監控定時器起始
(對應D9111)
M9112 步轉移監控定時器起始
(對應D9112)
M9113 步轉移監控定時器起始
(對應D9113)
M9114 步轉移監控定時器起始
(對應D9114)
M9180 激活步采樣跟蹤完成標志
M9181 激活步采樣跟蹤執行標志
M9182 激活步采樣跟蹤有效
M9196 在塊停止時控制輸出
M9197~9198 保險絲熔斷,
I/O校核出錯顯示切換
1、觸點指令
LD a觸點的邏輯運算開始
LDI b觸點的邏輯運算開始
LDP 檢測上升沿的運算開始
LDF 檢測下降沿的運算開始
AND 串聯a觸點
ANI 串聯b觸點
ANDP 檢測上升沿的串聯連接
ANDF 檢測下降沿的串聯連接
OR 并聯a觸點
ORI 并聯b觸點
ORP 檢測上升沿的并聯連接
ORF 檢測下降沿的并聯連接
2、結合指令
ANB 回路塊的串聯連接
ORB 回路塊的并聯連接
MPS 入棧
MRD 讀棧
MPP 出棧
INV 運算結果的反轉
MEP 運算結果上升沿脈沖化(Ver.2.30以上的產品對應)
MEF 運算結果下降沿脈沖化(Ver.2.30以上的產品對應)
3、輸出指令
OUT 線圈驅動
SET 動作保持
RST 解除保持的動作, 當前值及寄存器的清除
PLS 上升沿脈沖輸出
PLF 下降沿脈沖輸出
4、主控指令
MC 標志主控指令塊開始
MCR 標志主控指令塊結束
5、其他指令
NOP 無操作
6、結束指令
END 程序結束及輸入輸出處理, 并返回0步
二、FX3U步進梯形圖指令
STL 步進梯形圖的開始
RET 步進梯形圖的結束
三、FX3U應用指令-FNC.No順序
1、程序流程
00 CJ 條件跳轉
01 CALL 子程序調用
02 SRET 子程序返回
03 IRET 中斷返回
04 EI 允許中斷
05 DI 禁止中斷
06 FEND 主程序結束
07 WDT 看門狗定時器
08 FOR 循環范圍的開始
09 NEXT 循環范圍的結束
2、傳送· 比較
10 CMP 比較
11 ZCP 區間比較
12 MOV 傳送
13 SMOV 移位
14 CML 反轉傳送
15 BMOV 成批傳送
16 FMOV 多點傳送
17 XCH 交換
18 BCD BCD轉換
19 BIN BIN轉換
3、四則· 邏輯運算
20 ADD BIN加法運算
21 SUB BIN減法運算
22 MUL BIN乘法運算
23 DIV BIN除法運算
24 INC BIN加一
25 DEC BIN減一
26 WAND 邏輯與
27 WOR 邏輯或
28 WXOR 邏輯異或
29 NEG 求補碼
4、循環· 移位
30 ROR 循環右移
31 ROL 循環左移
32 RCR 帶進位循環右移
33 RCL 帶進位循環左移
34 SFTR 位右移
35 SFTL 位左移
36 WSFR 字右移
37 WSFL 字左移
38 SFWR 移位寫入[先入先出/先入后出控制用]
39 SFRD 移位讀出[先入先出控制用]
5、數據處理
40 ZRST 成批復位
41 DECO 譯碼
42 ENCO 編碼
43 SUM ON位數
44 BON ON位的判定
45 MEAN 平均值
46 ANS 信號報警器置位
47 ANR 信號報警器復位
48 SQR BIN開平方
49 FLT BIN整數→2進制浮點數轉換
6、高速處理
50 REF 輸入輸出刷新
51 REFF 輸入刷新(帶濾波器設定)
52 MTR 矩陣輸入
53 HSCS 比較置位(高速計數器用)
54 HSCR 比較復位(高速計數器用)
55 HSZ 區間比較(高速計數器用)
56 SPD 脈沖密度
57 PLSY 脈沖輸出
58 PWM 脈寬調制
59 PLSR 帶加減速的脈沖輸出
7、便捷指令
60 IST 初始狀態
61 SER 數據檢索
62 ABSD 凸輪控制絕對方式
63 INCD 凸輪控制相對方式
64 TTMR 示教定時器
65 STMR 特殊定時器
66 ALT 交替輸出
67 RAMP 斜坡信號
68 ROTC 旋轉工作臺控制
69 SORT 數據排列
8、外圍設備I/O
70 TKY 數字鍵輸入
71 HKY 16鍵輸入
72 DSW 數字開關
73 SEGD 7段譯碼
74 SEGL 7段碼時分顯示
75 ARWS 箭頭開關
76 ASC ASCII數據輸入
77 PR ASCII碼打印
78 FROM 特殊功能模塊的讀出
79 TO 特殊功能模塊的寫入
9、外圍設備(選件設備)
80 RS 串行數據的傳送
81 PRUN 8進制位傳送(8進制的)
82 ASCI HEX→ASCII的轉換
83 HEX ASCII→HEX的轉換
84 CCD 校驗碼
85 VRRD 電位器讀出
86 VRSC 電位器刻度
87 RS2 串行數據的傳送2
88 PID PID運算
10、數據傳送2
102 ZPUSH 變址寄存器的成批避讓保存
103 ZPOP 變址寄存器的恢復
11、浮點數運算
110 ECMP 2進制浮點數比較
111 EZCP 2進制浮點數區間比較
112 EMOV 2進制浮點數數據傳送
116 ESTR 2進制浮點數→字符串的轉換
117 EVAL 字符串→2進制浮點數的轉換
118 EBCD 2進制浮點數→科學計數法的轉換
119 EBIN 科學計數法→2進制浮點數的轉換
120 EADD 2進制浮點數加法運算
121 ESUB 2進制浮點數減法運算
122 EMUL 2進制浮點數乘法運算
123 EDIV 2進制浮點數除法運算
124 EXP 2進制浮點數指數運算
125 LOGE 2進制浮點數自然對數運算
126 LOG10 2進制浮點數常用對數運算
127 ESQR 2進制浮點數開平方根
128 ENEG 2進制浮點數符號反轉
129 INT 2進制浮點數→BIN整數的轉換
130 SIN 2進制浮點數SIN運算
131 COS 2進制浮點數COS運算
132 TAN 2進制浮點數TAN運算
133 ASIN 2進制浮點數SIN-1運算
134 ACOS 2進制浮點數COS-1運算
135 ATAN 2進制浮點數TAN-1運算
136 RAD 2進制浮點數角度→弧度的轉換
137 DEG 2進制浮點數弧度→角度的轉換
12、數據處理2
140 WSUM 算出數據合計值
141 WTOB 字節單位的數據分離
142 BTOW 字節單位的數據結合
143 UNI 16位數據的4位結合
144 DIS 16位數據的4位分離
147 SWAP 上下字節轉換
149 SORT2 數據排列2
13、定位
150 DSZR 帶DOG搜索的原點回歸
151 DVIT 中斷定位
152 TBL 表格設定定位
155 ABS 讀出ABS當前值
156 ZRN 原點回歸
157 PLSV 可變速脈沖輸出
158 DRVI 相對定位
159 DRVA 絕對定位
14、時鐘運算
160 TCMP 時鐘數據比較
161 TZCP 時鐘數據區間比較
162 TADD 時鐘數據加法運算
163 TSUB 時鐘數據減法運算
164 HTOS [小時]數據的秒轉換
165 STOH 秒數據的[小時]轉換
166 TRD 讀出時鐘數據
167 TWR 寫入時鐘數據
169 HOUR 計時表
15、外部設備
170 GRY 格雷碼的轉換
171 GBIN 格雷碼的逆轉換
176 RD3A 模擬量模塊的讀出
177 WR3A 模擬量模塊的寫入
16、其他指令
182 COMRD 讀出軟元件的注釋數據
184 RND 產生隨機數
186 DUTY 發出定時脈沖
188 CRC CRC運算
189 HCMOV 高速計數器傳送
17、數據塊的處理
192 BK+ 數據塊加法運算
193 BK- 數據塊減法運算
194 BKCMP= 數據塊的比較 S1=S2
195 BKCMP> 數據塊的比較 S1>S2
196 BKCMP< 數據塊的比較 S1<S2
197 BKCMP<> 數據塊的比較 S1≠S2
198 BKCMP<= 數據塊的比較 S1≦S2
199 BKCMP>= 數據塊的比較 S1≧S2
18、字符串控制
200 STR BIN→字符串的轉換
201 VAL 字符串→BIN的轉換
202 $+ 字符串的合并
203 LEN 檢測出字符串的長度
204 RIGHT 從字符串的右側開始取出
205 LEFT 從字符串的左側開始取出
206 MIDR 從字符串中任意選擇
207 MIDW 字符串中的任意替換
208 INSTR 字符串的檢索
209 $MOV 字符串的傳送
19、數據處理3
210 FDEL 數據表的數據刪除
211 FINS 數據表的數據插入
212 POP 讀取后入的數據[先入后出控制用]
213 SFR 16位數據n位右移(帶進位)
20、觸點比較
224 LD= 觸點比較LD S1=S2
225 LD> 觸點比較LD S1>S2
226 LD< 觸點比較LD S1<S2
228 LD<> 觸點比較LD S1≠S2
229 LD<= 觸點比較LD S1≦S2
230 LD>= 觸點比較LD S1≧S2
232 AND= 觸點比較AND S1=S2
233 AND> 觸點比較AND S1>S2
234 AND< 觸點比較AND S1<S2
236 AND<> 觸點比較AND S1≠S2
237 AND<= 觸點比較AND S1≦S2
238 AND>= 觸點比較AND S1≧S2
240 OR= 觸點比較OR S1=S2
241 OR> 觸點比較OR S1>S2
242 OR< 觸點比較OR S1<S2
244 OR<> 觸點比較OR S1≠S2
245 OR<= 觸點比較OR S1≦S2
246 OR>= 觸點比較OR S1≧S2
214 SFL 16位數據n位左移(帶進位)
21、數據表的處理
256 LIMIT 上下限限位控制
257 BAND 死區控制
258 ZONE 區域控制
259 SCL 量程(不同點座標數據)
260 DABIN 10進制ASCII→BIN的轉換
261 BINDA BIN→10進制ASCII的轉換
269 SCL2 量程2(X/Y座標數據)
22、外部設備通信(變頻器通信)
270 IVCK 變頻器的運轉監視
271 IVDR 變頻器的運行控制
272 IVRD 讀取變頻器的參數
273 IVWR 寫入變頻器的參數
274 IVBWR 變頻器的參數成批寫入
275 IVMC 變頻器的多個命令
23、數據傳送3
278 RBFM BFM分割讀出
279 WBFM BFM分割寫入
24、高速處理2
280 HSCT 高速計數器表比較
25、擴展文件寄存器的控制
290 LOADR 讀出擴展文件寄存器
291 SAVER 擴展文件寄存器的成批寫入
292 INITR 文件寄存器及擴展文件寄存器的初始化
293 LOGR 寫入文件寄存器及擴展文件寄存器
294 RWER 擴展文件寄存器的重新寫入
295 INITER 擴展文件寄存器的初始化
26、FX3U-CF-ADP用CF卡控制
300 FLCRT 文件的創建· 確認(Ver.2.61以上的產品對應)
301 FLDEL 文件的刪除· CF卡格式化(Ver.2.61以上的產品對應)
302 FLWR 數據寫入(Ver.2.61以上的產品對應)
303 FLRD 數據讀出(Ver.2.61以上的產品對應)
304 FLCMD 對FX3U-CF-ADP的動作指示(Ver.2.61以上的產品對應)
305 FLSTRD FX3U-CF-ADP的狀態讀出(Ver.2.61以上的產品對應)
三菱PLC指令代碼表
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底