
軌跡跟隨:指一個運動的物體跟隨另一個主動運動物體而實現實時的位置,速度和方向的運動。在變壓器漆包線纏繞機,一次性筷子包裝機,數控機床手搖輪等機械上廣泛應用,下面來介紹其工作原理。
首先要有一個主動運動的軸簡稱:主軸。主軸通常做無規律的運動,通過編碼器檢測主軸旋轉一圈的時間,再根據跟隨軸一圈需要行進的距離算出跟隨速度,利用可實時修改頻率的發脈沖指令發送脈沖,驅動步進或伺服運動。
例題:主軸由變頻器帶動運行,主軸上安裝了一個600線的編碼器,跟隨軸由步進電機驅動,旋轉一圈需要3200個脈沖。要求實現編碼器旋轉一圈的同時,步進電機也旋轉一圈,方向也會隨著主軸改變。
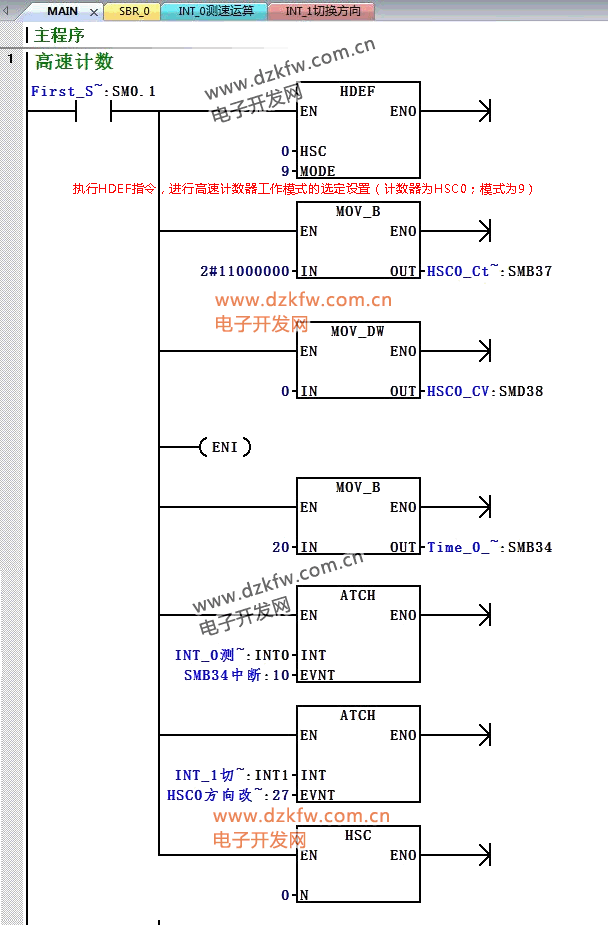
主程序需要編寫高速計數每20ms讀取一次計數值,(高速脈沖HDEF指令和中斷程序運用)如下所示:
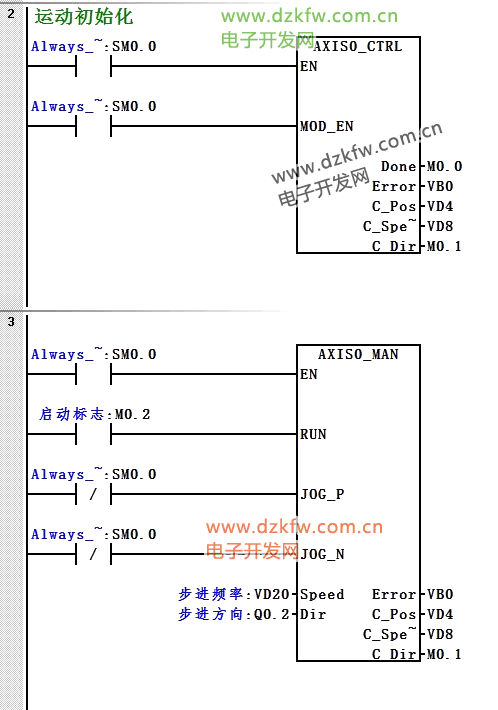
高速脈沖輸出程序,此處省略運動向導組態。
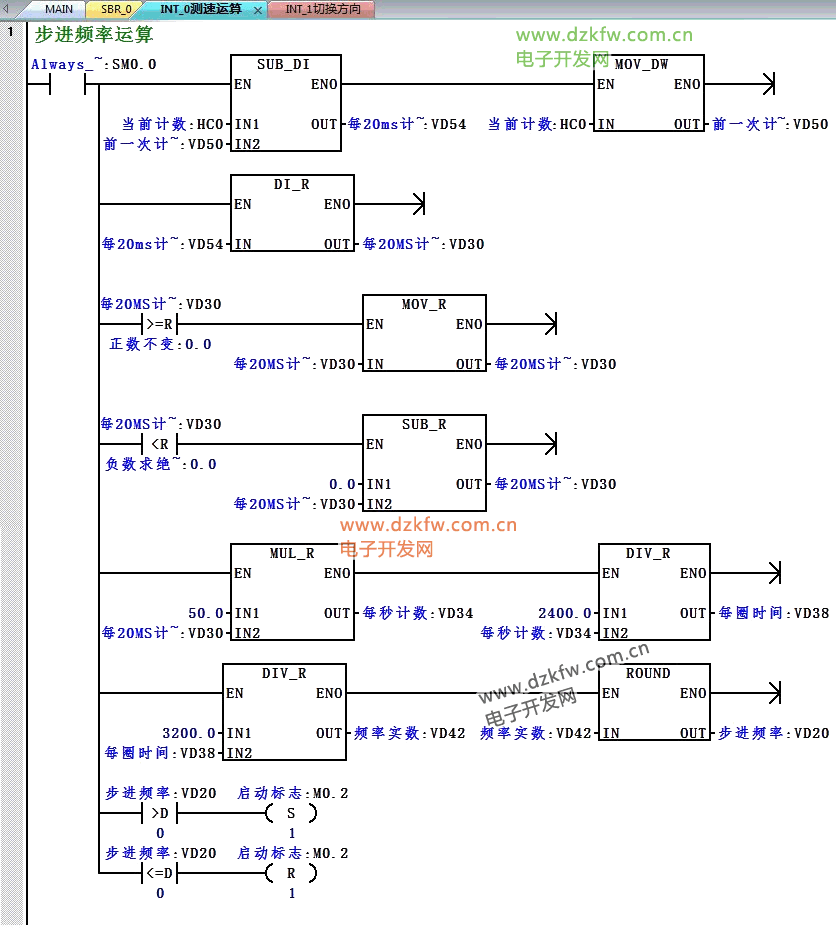
每20ms測算出步進電機頻率的中斷程序如下所示:
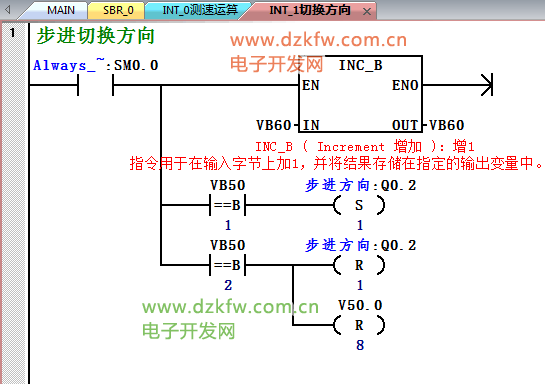
由于方向要實時根據編碼器旋轉方向而改變,所以在向導中沒有組態方向,而需要利用高速計數方向改變中斷來切換方向,程序如下所示:
此處只介紹跟隨的主體程序,利用這個原理可以做出很多復雜的運動控制,如果閱讀過程中有什么問題或者你有更好的方法,歡迎關注“電子開發網”公眾號。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底