
(2) HMI上能有手動、自動控制畫面;并能顯示報警具體信息
(3) HMI上能顯示當前位置、目標位置、當前速度、目標速度的顯示
(4) HMI上能設置各段位置和速度
(5) 當在手動模式時,自動模式不能運行,兩種模式需互鎖
(6) 要求每次啟動時均在A 位置開始運行,在沒有按下停止按鈕時,應在ABC三點循環運行,可隨意更改三點位置值及運行速度
(7) 當按下停止按鈕時,不能立即停止,應運行完該段位置才能停止
(8) 當按下急停按鈕時,電機應立即停止
本例子采用200SMART ST20 CPU,在看本案例時需要有一定的定位基礎知識,能夠清楚步進電機是如何進行控制的,是怎么去實現改變運行方向并了解運動控制向導操作!
二、案例介紹:下圖是電機的示意圖;I0.2為正限位 I0.3為原點信號I0.4為負限位
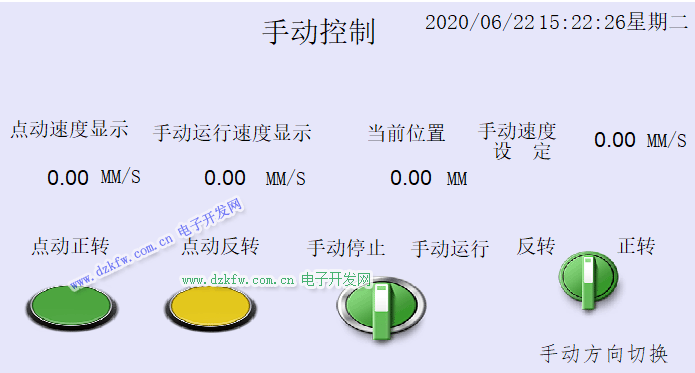
HMI手動控制畫面顯示當前位置、點動速度、手動運行速度及設置手動運行速度
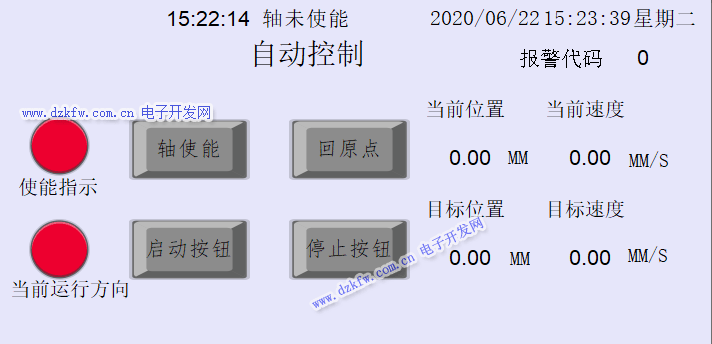
自動控制畫面 顯示當前位置和速度,目標位置和速度,使能指示等
參數設置畫面可設置各段速度和位置
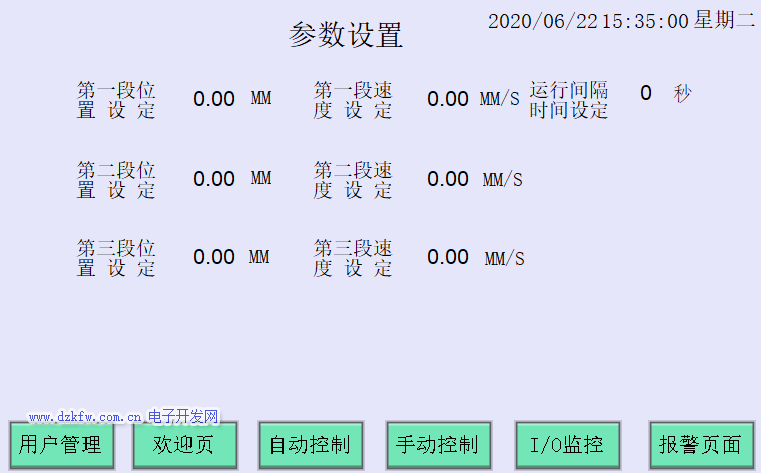
其他畫面不一一展示
按鈕和plc怎樣關聯請查看以下教程:
1、www.tuo13886.net.cn/Article/HMI/8008.html
昆侖通態連接西門子plc_昆侖通態觸摸屏和s7-200 smart以太網通訊的通訊
2、www.tuo13886.net.cn/Article/Kingview/10004.html
KingView組態王與S7-200 SMART通過網口連接 TCP通訊
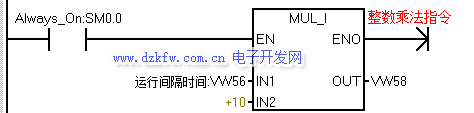
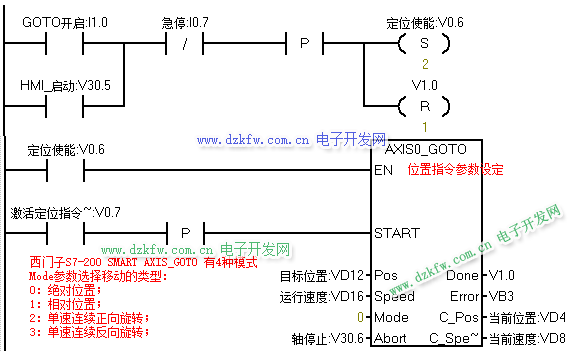
下面我們開始寫程序,首先應該是軸使能以及初始化程序,但在編寫初始化程序之前,我們考慮在HMI方便運行間歇時間的設定,做了個時間數據的運算程序
接著使用單按鈕的方式編寫軸使能程序 HMI及硬件按鈕均可使能
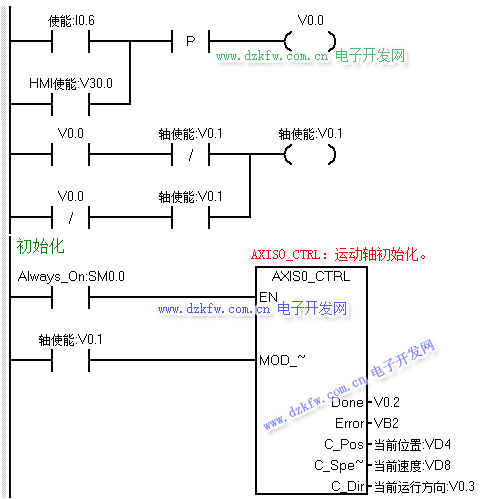
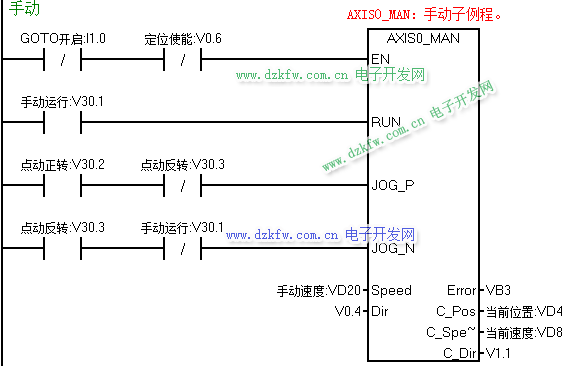
其次我們接著編寫手動部分的程序,手動運行正反轉時需要互鎖,并且在自動模式時手動模式不能運行,所以用定位使能及自動運行兩個條做手動程序的EN位
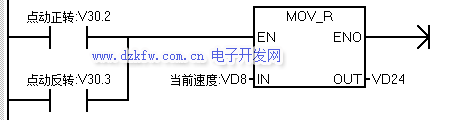
當點動正轉或反轉時,我們把當前速度傳送至HMI上顯示
執行回原點程序
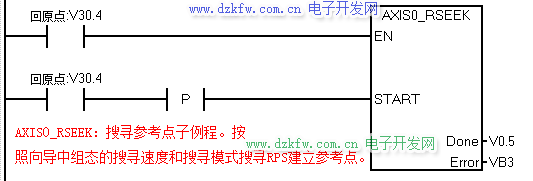
原點完成后把第一A點的位置和速度傳送至目標位置和速度中

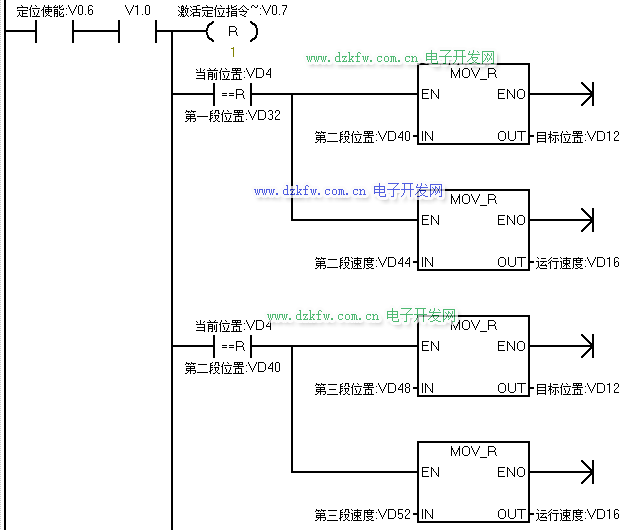
最后是自動部分的程序,當沒有急停的情況下,按下啟動按鈕后,則開始執行GOTO指令,開始運行依第一段速度運行至第一段位置
當當前位置和第一段A點位置相等時,把B點位置和速遞傳送至目標值地址內,延時一定時間后,運行至B點,當到達B點后把C點的位置和速度傳送至目標位置地址
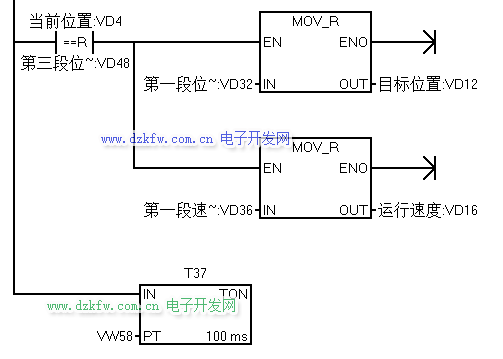
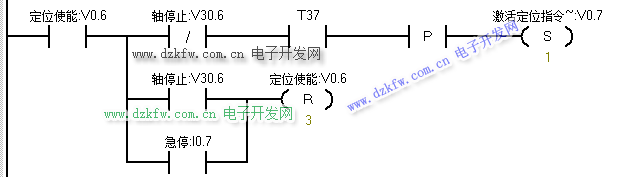
在沒按下停止時,在ABC三處反復循運行;按下停止按鈕后,則不再運行下一段目標值;按下急停按鈕時,則需立即停止
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底