
這些指令主要是針對(duì)用 PLC 直接聯(lián)動(dòng)伺服放大器,目的是可以不借助其他擴(kuò)展設(shè)備(例如1GM 模塊)來進(jìn)行簡(jiǎn)單的點(diǎn)位控制, 使用這些指令時(shí)最好配合三菱的伺服放大器 (如 MR-J2)。然而,我們也可以用這些指令來控制步進(jìn)電機(jī)的運(yùn)行,下面我們來了解相關(guān)指令的用法:
這些介紹的指令只適用于 FX1S、FX1N 系列的晶體管輸出 PLC,如 FX1N-60MT 。
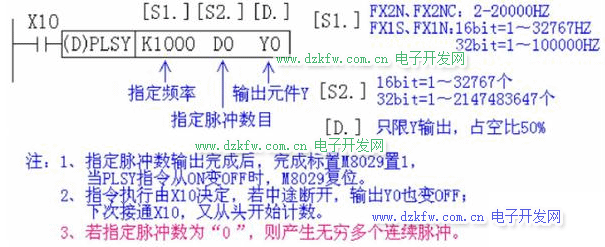
1、 脈沖輸出指令 PLSY (FNC57 )
PLSY 指令用于產(chǎn)生指定數(shù)量的脈沖。 助記法為 HZ、數(shù)目 Y 出來。 指令執(zhí)行如下:
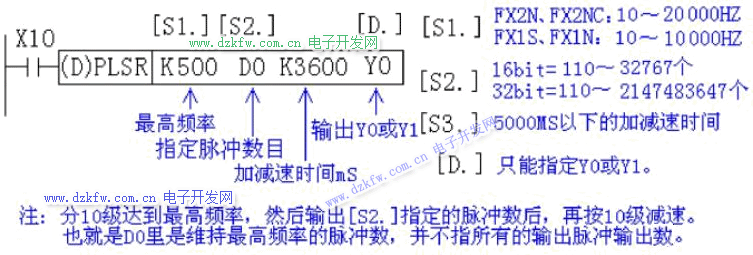
2、 帶加減速的脈沖輸出指令 PLSR(FNC59)
3、 回原點(diǎn) ZRN (FNC156)-------- 重點(diǎn)撐握
ZRN 指令用于校準(zhǔn)機(jī)械原點(diǎn)。 助記法為高速、減速至原點(diǎn)。 指令執(zhí)行如下:

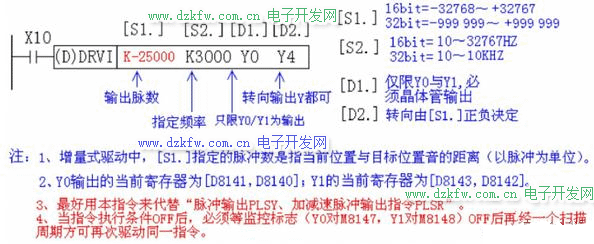
4、 增量驅(qū)動(dòng) DRVI (FNC158 )-------- 重點(diǎn)撐握
DRVI 為單速增量驅(qū)動(dòng)方式脈沖輸出指令。這個(gè)指令與脈沖輸出指令類似但又有區(qū)別,
只是根據(jù)數(shù)據(jù)脈沖的正負(fù)多了個(gè)轉(zhuǎn)向輸出。本指令執(zhí)行如下:
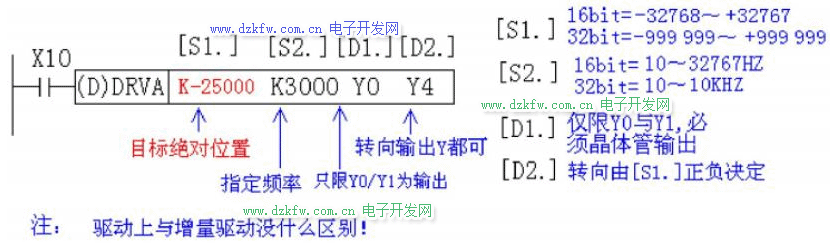
5、 絕對(duì)位置驅(qū)動(dòng)指令 DRVA (FNC159 )
本指令與 DRVI 增量驅(qū)動(dòng)形式與數(shù)值上基本一樣,唯一不同之處在于 [S1.]:
在增量驅(qū)動(dòng)中, [S1.]指定的是距離,也就是想要發(fā)送的脈沖數(shù);而在絕對(duì)位置驅(qū)動(dòng)指令中,[S1.]定義的是目標(biāo)位置與原點(diǎn)間的距離,即目標(biāo)的絕對(duì)位置。
下面以此次的設(shè)備為例,說明步進(jìn)電機(jī)的驅(qū)動(dòng)方法:
在用步進(jìn)電機(jī)之前,可以考慮以下幾個(gè)相關(guān)的問題:
1、何謂步進(jìn)電機(jī)的步距角?何為整步、半步?何謂步進(jìn)電機(jī)的細(xì)分?jǐn)?shù)?
2、用步進(jìn)電機(jī)拖動(dòng)絲桿移動(dòng)一定的距離,其脈沖數(shù)是如何估算的?
3、在步進(jìn)順控中運(yùn)用點(diǎn)位指令應(yīng)注意什么?( 切斷電源的先后問題! )
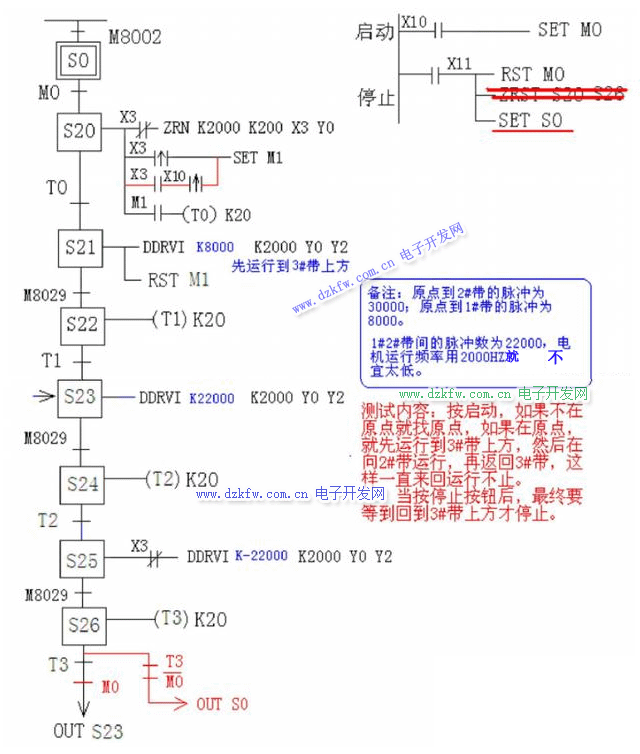
步進(jìn)電機(jī)測(cè)試程序與接線如下:
1、按下啟動(dòng)按鈕,絲桿回原點(diǎn), 5 秒鐘后向中間移動(dòng), 2 秒后回到原點(diǎn)。
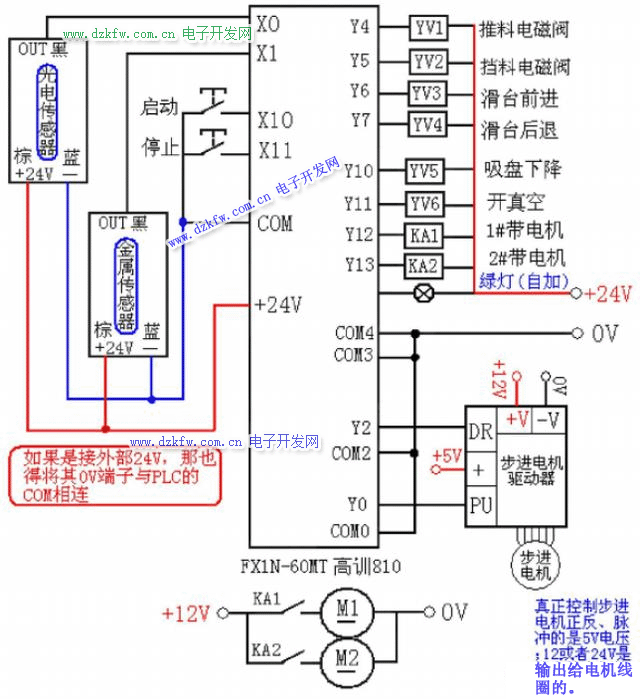
注:步進(jìn)電機(jī)正數(shù)為后退, Y2 亮,負(fù)數(shù)為向前, Y2 不亮。向前方為向 (3#帶側(cè))運(yùn)動(dòng)為,向后為向( 1#帶側(cè))運(yùn)動(dòng)。
給正數(shù) DDRVI 時(shí),后退 M8029 不動(dòng)作,沒有完成標(biāo)志;但給負(fù)值前進(jìn)時(shí),會(huì)有完成標(biāo)志M8029 的動(dòng)作。
為什么會(huì)在前進(jìn)時(shí)(有 M8029 為標(biāo)志時(shí)),按停后,可以再次按 X10 啟動(dòng)起來,而在后退 Y2 點(diǎn)亮?xí)r,不能再按 X10 啟動(dòng)呢?
M8029 標(biāo)志位必須在同一掃描周期內(nèi)捕捉,而且要緊鄰相應(yīng)的點(diǎn)位控制指令下一步!
2、另一個(gè)示例:
要求制做一個(gè)觸摸屏畫面,輸出指定的位置( MM 為單位),讓步進(jìn)電機(jī)運(yùn)動(dòng)到指定位置后停下。假定工件指定位置大于實(shí)際位置值,電機(jī)正轉(zhuǎn)到位;反之,反轉(zhuǎn)到位。且步進(jìn)電機(jī)走 1MM 要 80個(gè)脈沖。

以上,歡迎動(dòng)動(dòng)手分享及收藏!
 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底