
01實(shí)現(xiàn)功能介紹
1. 介紹三菱PLC定位控制的一些常用特殊寄存器
2. 介紹三菱PLC回原點(diǎn)的二種方式
3. 三菱PLC原點(diǎn)回歸程序編寫
02硬件設(shè)備
1. FX3U-MT/ESS

2. MR-JE-10A

03軟件
1. GX Work2
2. MR Configurator2
04定位常見特殊寄存器介紹
一、特殊輔助繼電器
相關(guān)特殊輔助繼電器如下表所示。Y000、Y001、Y002、Y003為脈沖輸出端軟元件。

1.在實(shí)際編程過程種,把M8029和M8329寫在定位指令后面,來判斷這條定位指令是否正常完成,定位指令正常運(yùn)行完成,m8029會(huì)導(dǎo)通一個(gè)掃描周期,反之m8329會(huì)導(dǎo)通一個(gè)掃描周期。
2.脈沖輸出中監(jiān)控常用于監(jiān)控當(dāng)前軸是否處于運(yùn)動(dòng)狀態(tài)。
3.原點(diǎn)回歸方向指定用來改變當(dāng)前軸回原點(diǎn)的方向,當(dāng)發(fā)現(xiàn)回原點(diǎn)方向不是實(shí)際需要回原點(diǎn)的方向,改變這個(gè)特殊繼電器。
4.正轉(zhuǎn)極限和反轉(zhuǎn)極限,一般是用外部極限傳感器的X點(diǎn)來驅(qū)動(dòng)。
二、特殊數(shù)據(jù)寄存器
相關(guān)特殊數(shù)據(jù)寄存器如下表所示。Y000、Y001、Y002、Y003為脈沖輸出端軟元件。

1. 當(dāng)前值寄存器D8340用來記錄當(dāng)前脈沖軸位置,常用于DMOV傳送到其他寄存器,注意寄存器要間隔使用,占用32位,目的是為了記錄更大的數(shù)據(jù),如果寄存器連著使用,會(huì)造成寄存器之間數(shù)據(jù)沖突,導(dǎo)致數(shù)據(jù)異常
2. 基地速度D8342,用于設(shè)定當(dāng)前脈沖軸回原點(diǎn)的基地速度,是當(dāng)前脈沖軸的一個(gè)最低速度。
3. 原點(diǎn)回過速度D8346用于設(shè)定一個(gè)回原點(diǎn)的一個(gè)速度。
4. 爬行速度D8345,是脈沖軸運(yùn)行了回原點(diǎn)速度后當(dāng)碰到原點(diǎn)后,有一個(gè)減速過程,切換成爬行速度,然后在離開原點(diǎn)的時(shí)候,停止脈沖軸,并對(duì)當(dāng)前脈沖軸位置清零。
5. 加減速時(shí)間的設(shè)定是為了軸啟動(dòng)和軸停止的時(shí)候,有一個(gè)平滑的過渡。
05原點(diǎn)回歸指令舉例
一、ZRN指令
1、指令格式 ZRN S1 S2 S3 D
S1:指令開始原點(diǎn)回歸的速度
S2: 指令爬行速度
S3:指定輸入近點(diǎn)信號(hào)的軟元件編程
D:指定要輸出脈沖的輸出
2、舉例
ZRN D0 D2 X1 Y0—按下X1啟動(dòng)后,Y0后發(fā)出以D0為頻率的回歸速度(通常較快),到達(dá)X1原點(diǎn)開關(guān)位置,變?yōu)橐訢2為頻率的爬行速度(一般比較慢)到剛好離開X1的位置后停下,為機(jī)械原點(diǎn)和程序原點(diǎn)重合;
3、注意
D8340為記錄當(dāng)前脈沖軸當(dāng)前位置,回零點(diǎn)完成后D8340的值自動(dòng)清零;每次在執(zhí)行回原點(diǎn)的時(shí)候,需要保證軸的當(dāng)前位置在原點(diǎn)的正方向。
相對(duì)絕對(duì)指令程序舉例:
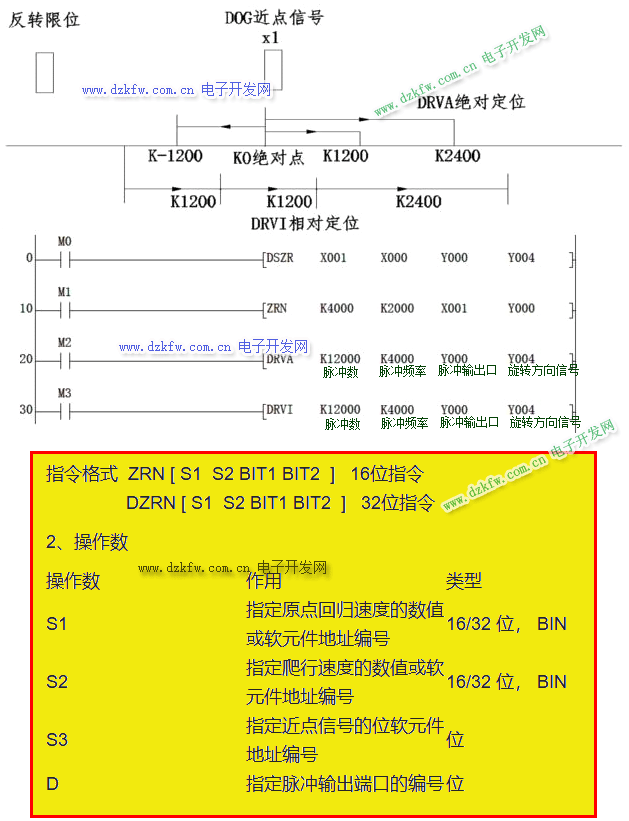
三菱PLC指令教程DDRVI和DDRVA、ZRN、DZRN指令用法實(shí)例
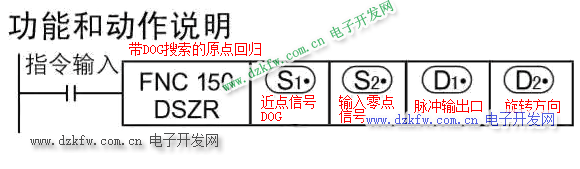
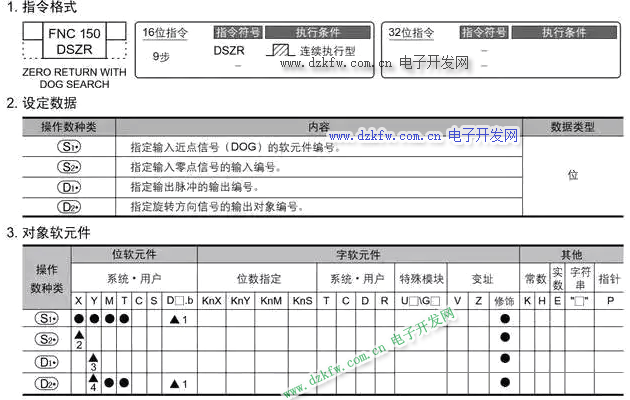
二、DSZR指令
1、指令格式DSZR S1 S2 D1 D2
S1:近點(diǎn)輸入信號(hào)。
S2:零點(diǎn)輸入信號(hào)。
D1:脈沖輸出端。
D2:電機(jī)旋轉(zhuǎn)方向信號(hào)的輸出端。
2、舉例
DSZR是帶DOG搜索的原點(diǎn)回 歸指令;例如 DSZR X0 X1 Y0 Y3;那么X0是原點(diǎn)接近信號(hào),X1是原位置信號(hào),Y0是脈沖輸出信號(hào),Y3是方向輸出信號(hào)。
DSZR / 帶DOG搜索的原點(diǎn)回歸
概要:
執(zhí)行原點(diǎn)回歸,使機(jī)械位置與可編程控制器內(nèi)的當(dāng)前值寄存器一致的指令。
DOG搜索功能的對(duì)應(yīng)
允許使用近點(diǎn)DOG和零點(diǎn)信號(hào)的原點(diǎn)回歸,但是不可以對(duì)零點(diǎn)信號(hào)計(jì)數(shù)后決定原點(diǎn)。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底