
一、案例(項目)描述
如圖,有4臺電機,分別控制了4條傳送帶,物料源源不斷的從左邊流入,每個工位上有對應的工人,工人處理完物料之后就按放行按鈕,物料將流入下個工位,控制要求具體如下:
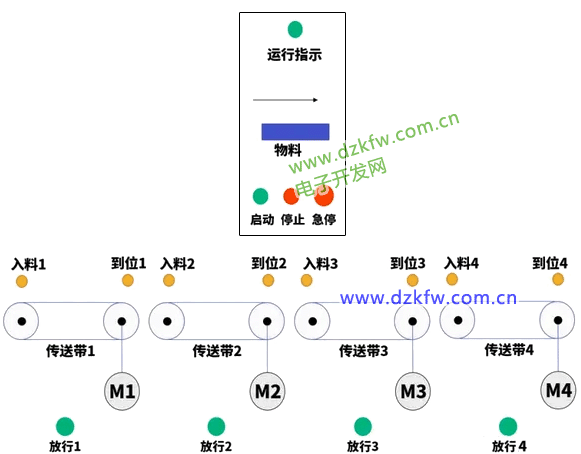
1.按下啟動按鈕,運行指示燈點亮,設備啟動,按下停止按鈕,設備停止,再按啟動時設備能按照之前的動作繼續運行。
2.每個工位上沒有工件的時候,入料感應器有物體流入,該傳送帶運行,直到物料碰到到位感應器后停止。
3.工件上有物料的時候,下個工位無物料時,按下放行,物料會流入下個工位(此時定義為“獨立運行”)。
4.工件上有物料的時候,下個工位也有物料時,按下放行,需要等待下個工位放行時,再觸發電機運轉,實現本工位和下個工位一起運行(該工位的運行我們稱為“同步運行”)(此處為本程序的難點)
二、I/O分配
下表是所有輸入輸出點位的分配
| 輸入點 | 標簽 | 符號 | 輸出點 | 標簽 | 符號 |
| X0 | 啟動 | PB1 | Y0 | 運行指示燈 | H1 |
| X1 | 停止 | PB2 | Y1 | 電機1 | KM1 |
| X2 | 急停 | ES1 | Y2 | 電機2 | KM2 |
| X3 | 放行1 | PB3 | Y3 | 電機3 | KM3 |
| X4 | 放行2 | PB4 | Y4 | 電機4 | KM4 |
| X5 | 放行3 | PB5 | |||
| X6 | 放行4 | PB6 | |||
| X7 | 入料1 | PH1 | |||
| X10 | 到位1 | PH2 | |||
| X11 | 入料2 | PH3 | |||
| X12 | 到位2 | PH4 | |||
| X13 | 入料3 | PH5 | |||
| X14 | 到位3 | PH6 | |||
| X15 | 入料4 | PH7 | |||
| X16 | 到位4 | PH8 |
控制的過程中,需要用到很多中間繼電器,輔助去控制,這個是本案例的核心!下表格是各個工位運行的標志位,“1”表示的傳送帶1,“2”表示的傳送帶2;“獨立運行”和“同步運行”的說明在上面案例描述中有說明,詳細的控制說明將在后面的程序講解中進行描述,這些標志位都采用的普通中間繼電器,假如想要首先斷電保持,可以使用M1023以上的中間繼電器。
電機4下面沒有下一臺電機了,所以電機4只有獨立運行,沒有其對應的同步運行。
| 標志位 | 注釋 | 標志位 | 注釋 |
| M0 | 獨立運行1 | M4 | 同步運行1 |
| M1 | 獨立運行2 | M5 | 同步運行2 |
| M2 | 獨立運行3 | M6 | 同步運行3 |
| M3 | 獨立運行4 | M7 | 入料運行 |
三、電路圖紙
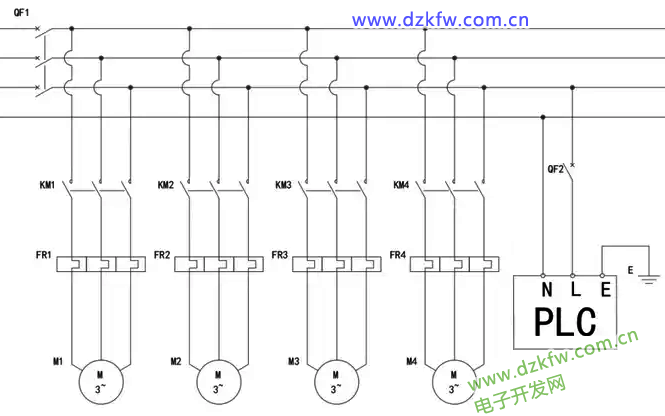
1.主電路
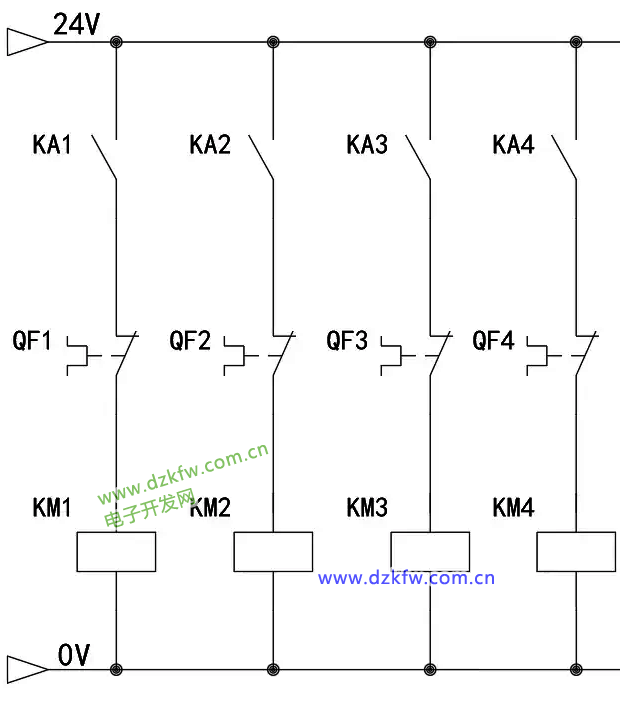
2.繼電器電路
3.控制電路

四、程序編寫
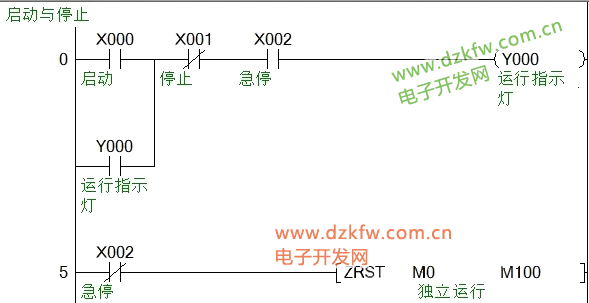
1.啟動與停止。
啟動按鈕按下后觸發Y0啟動并且形成自鎖,停止按鈕 X1或者急停按鈕X2按下后,運行指示燈熄滅,此處的急停按鈕外部接線接的是常閉觸點,所以程序內部寫成常開;正常情況下,停止按鈕按下后,重新按啟動可以繼續運行,而如果按下的是急停,就把M0到M100中間的所有點位都復位。
2.電機1的控制。
電機的啟動必須要在設備啟動狀態Y0的條件下動作,因此加了Y0的常開觸點,這樣能夠實現暫停控制,停止時只是斷開Y點的輸出,不復位控制的M點,重新按啟動按鈕時,電機能保持之前的動作。
入料運行指的是工位1沒有物料,感應器碰到工位1的入料感應器是觸發的動作情況。
“獨立運行1”指的是2好工位沒有物料時,按下放行按鈕,本工位的物料會留往下一個工位,這個對應的M點在后面的程序里還需要控制下一臺電機。
“同步運行1”指的是工位1上面有物料,工位2上面也有物料時,我們按下放行1,物料暫時還不能流走,必須等待下一臺電機在動作時電機才能動作,跟著下一臺電機走,所以這里串聯了一個Y2的常開,同時,第二臺電機的動作不一定說明時候完成動作,所以這里需要加一個Y1的常開觸點,保持自鎖。
假如上個工位的物料到達了這個工位了,碰到X10了,而流往下個工位的物料還沒到達下個工位,這個時候同步運行還沒結束,電機1也不應該運行,所以這里加了一個X10的常閉觸點。
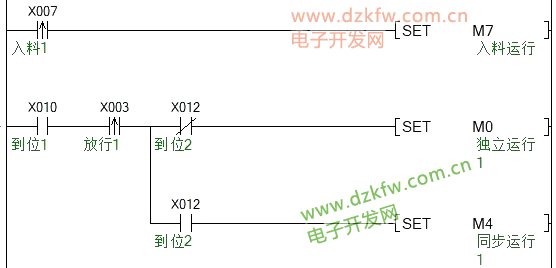
入料1感應器感應到有物體就觸發M7入料運行;工位1有物料(X10有信號)時,下一個工位有沒物料時(X12無信號)觸發獨立運行M0,下個工位有物料時,觸發同步運行M4.
停止控制部分的程序如下:
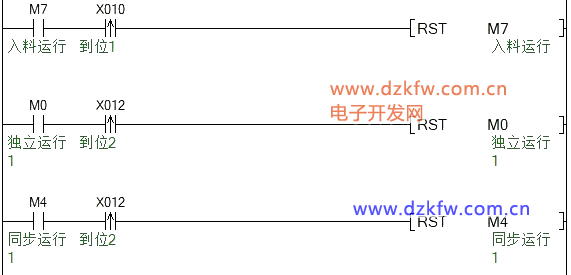
入料運行時,碰到工位1的到位感應器X10時,復位對應的M7標志位;
獨立運行時,保證物料流入下一個工位的感應器X12時,復位對應的M0標志位;
同步運行時,需要保證下個工位到位感應器X12碰到,這個過程一開始工位2也有物料,在運行的過程中,X12一開始是閉合的,工位2的物料離開工位2,X12斷開,工位1的物料離開工位1到達工位2,X12再次導通,所以這里必須用用上升沿,不能用常開點替換。
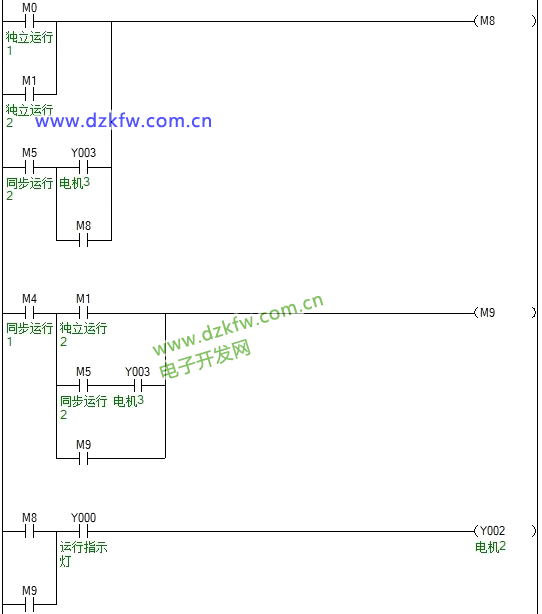
3.電機2的控制。
能控制電機Y2轉動的有以下4個動作:
獨立運行1、獨立運行2、同步運行2、同步運行1,同步運行2(M5)的輸出也需要下個電機Y3條件的觸發才能啟動,這里并聯了M8常開觸點,可以形成自鎖;“同步運行1”不是說一觸發電機就得轉動,還必須要電機2配合才能啟動,這里電機2可以是處于獨立運行的狀態,也可以處于同步運行狀態,處于同步運行狀態時需要電機Y3也處于運行狀態,所以這里串聯了Y3的常開觸點,輸出M9,為了防止“同步運行1”的動作還沒完成,而“獨立運行2”和“同步運行2”已經斷開了保證動作完成,這里給了M9常開觸點,形成自鎖。
控制工位2的2個標志位M1(獨立運行2)和M2(同步運行2)的觸發主要看下個工位的到位感應器X14,按下放行按鈕X4,下個工位沒有物料時(X14常閉)觸發獨立運行2,下個工位有物料時(X14常開)觸發同步運行2。

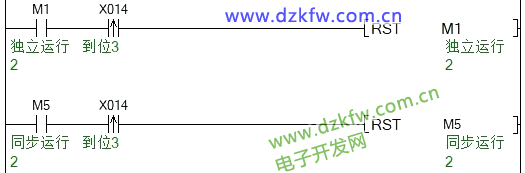
停止控制部分的程序如下:
獨立運行時,保證物料流入下一個工位的感應器X14時(這里可以用上升沿或者常開觸點),復位對應的M1標志位;
同步運行時,需要保證下個工位到位感應器X14碰到,這個過程一開始工位3也有物料,在運行的過程中,X14一開始是閉合的,工位3的物料離開工位3,X14斷開,工位2的物料離開工位2到達工位3,X14再次導通,所以這里必須用用上升沿,不能用常開點替換。
4.電機3的控制。
能控制電機Y3轉動的有以下4個動作:獨立運行2、獨立運行3、同步運行3、同步運行2,由于 “同步運行2”不是說一觸發電機就得轉動,還必須要電機3也處于啟動的條件,因此這里面串聯了控制本臺電機轉動的兩個標志位“獨立運行3”和“同步運行3”,并且為了保證動作完成,防止“同步運行2”的動作還沒完成,而“獨立運行3”和“同步運行3”已經斷開了,所以加了個M11常開觸點形成自鎖。
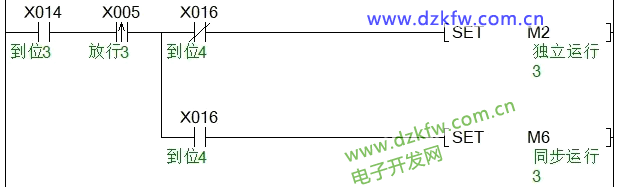
控制工位3的2個標志位M2(獨立運行3)和M6(同步運行3)的觸發主要看下個工位的到位感應器X16,按下放行按鈕X5,下個工位沒有物料時(X16常閉)觸發獨立運行3,下個工位有物料時(X16常開)觸發同步運行3。
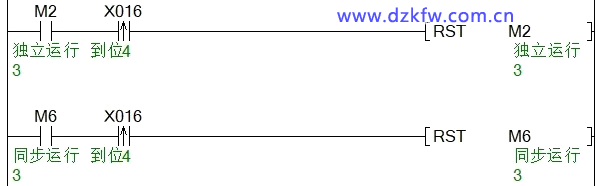
停止控制部分的程序如下:
“獨立運行”和“同步運行”在物料流入下一個工位的到位感應器X16時,說明動作已經完成,此時復位對應的M點。
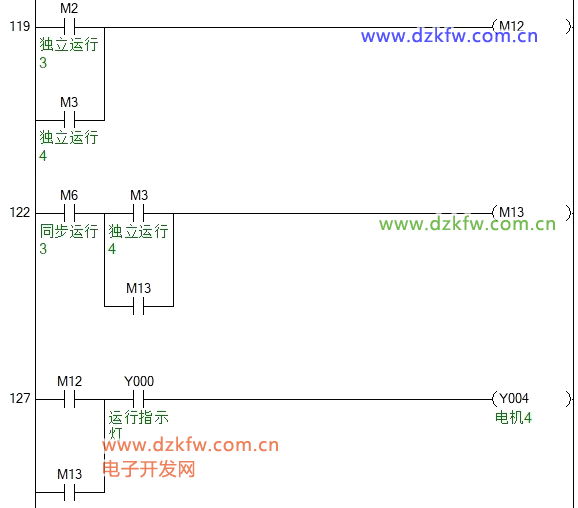
5.電機4的控制。
能控制電機Y3轉動的有以下3個動作:獨立運行3、獨立運行4、同步運行3,由于 “同步運行3”不是說一觸發電機就得轉動,還必須要電機4也處于啟動的條件,因此這里面串聯了控制本臺電機轉動的標志位“獨立運行4”,并且為了保證動作完成,防止“同步運行3”的動作還沒完成,而“獨立運行3”和“同步運行3”已經斷開了,所以加了個M13常開觸點形成自鎖。
工位4獨立運行的觸發需要工位4到位感應X16有物料的條件下,按下放行按鈕X5上升沿時區觸發。
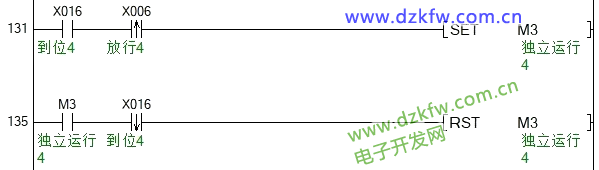
工位4獨立運行的停止需要物體離開工位4(X16下降沿)時區進行復位。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底