
位置控制模式
在自動控制系統中經常用到幾種控制模式分別是位置控制模式、速度控制模式、轉矩控制模式、全閉環控制模式。但是比較常用的控制模式還是位置控制模式,說到位置控制模式那么我們就想到了定位控制指令,下面分別對這幾個指令講解一遍。在步進電機和伺服電機控制中,以下這些指令經常用到。
定位指令
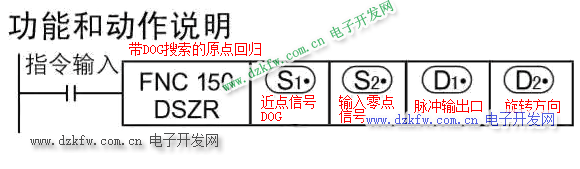
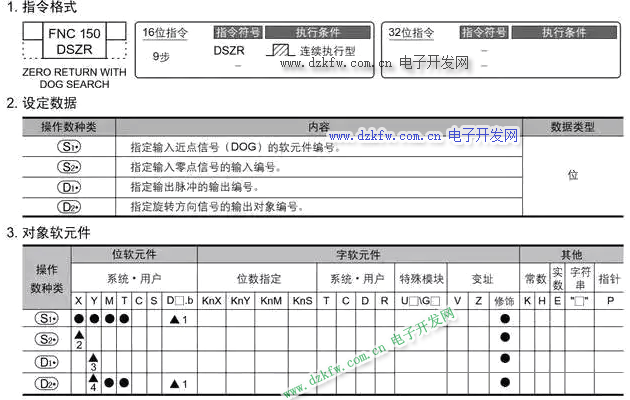
一DSZR / 帶DOG搜索的原點回歸
概要:
執行原點回歸,使機械位置與可編程控制器內的當前值寄存器一致的指令。
DOG搜索功能的對應
允許使用近點DOG和零點信號的原點回歸,但是不可以對零點信號計數后決定原點。
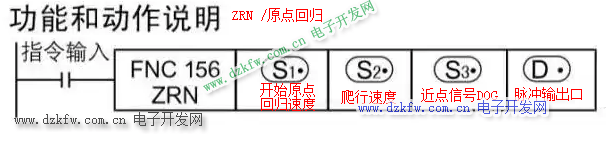
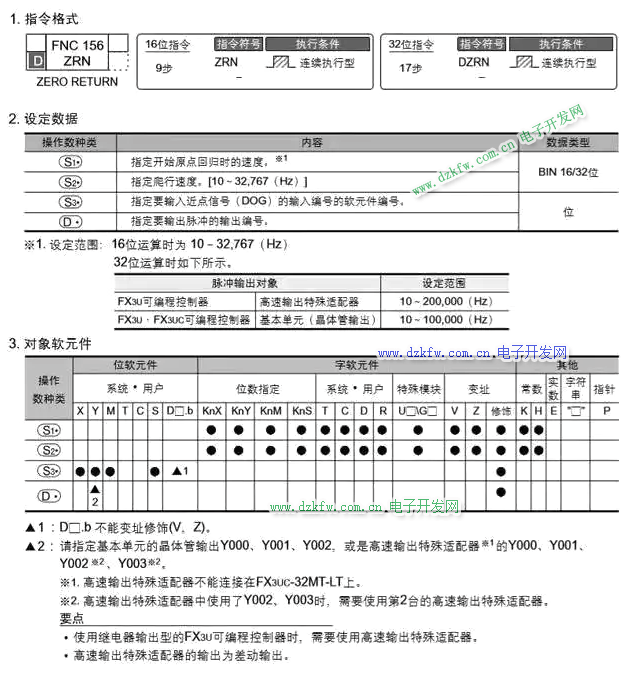
概要:
執行原點回歸使機械位置與可編程控制器內的當前寄存器一致的指令
該指令是PLC與伺服驅動器配合工作時,用指定脈沖速度和脈沖輸出端口,讓執行機構向動作原點(DOG)移動,直到遇到原點信號滿足條件為止。
概要:
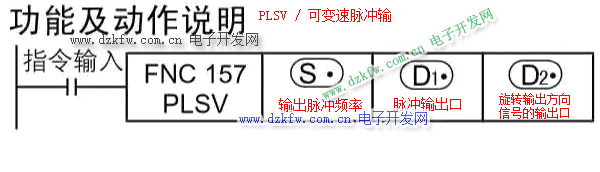
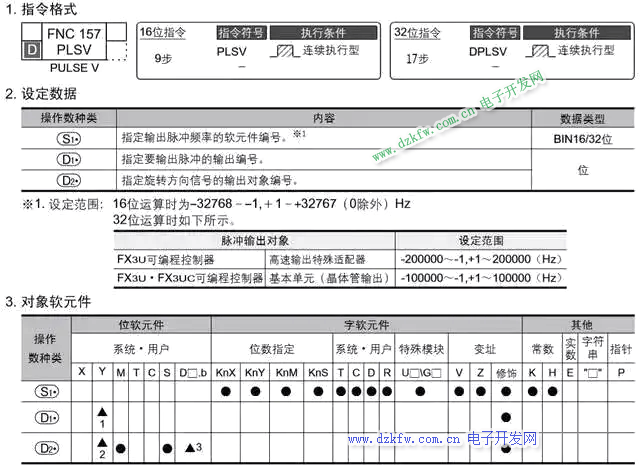
輸出帶旋轉方向的可變速的脈沖指令
概要:
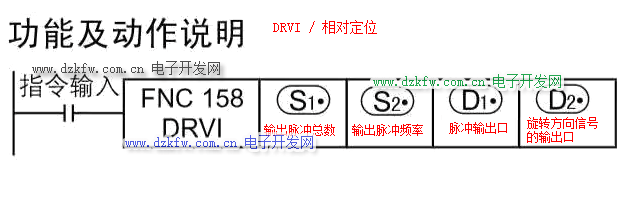
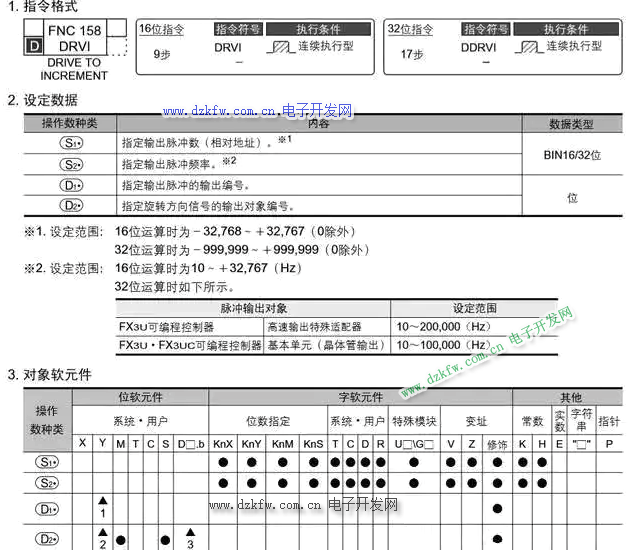
以相對驅動方式執行單速定位的指令,用帶正/負的符號指定從當前位置開始的移動距離的方式,也稱為增量(相對)驅動方式
只有晶體管輸出PLC才能使用該指令。
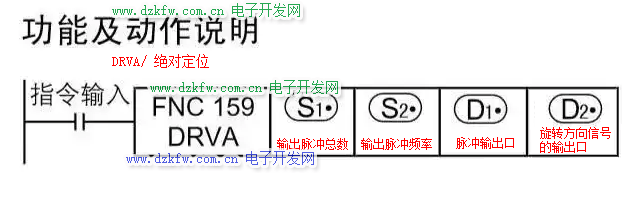
概要:
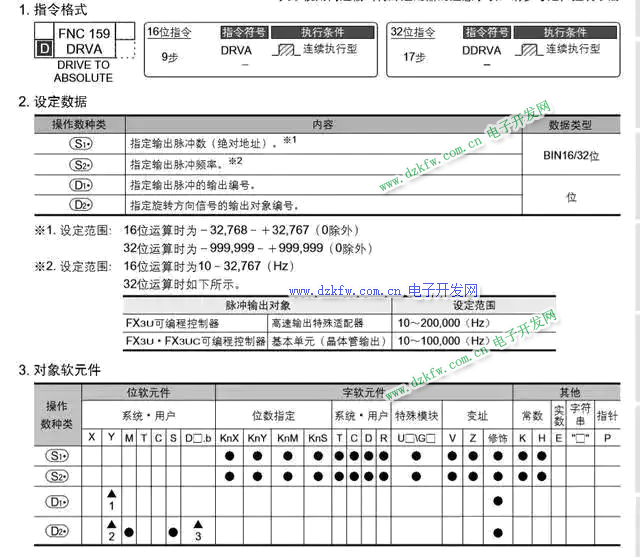
以絕對驅動方式執行單速定位的指令。該指令是按指定的端口、頻率和運行方向輸出脈沖,令伺服執行機構運動到指定目的點。只有晶體管輸出PLC才能使用該指令。
在三菱plc定位功能中,采用目標位置設定方式不同的相對定位(DRVI)指令和絕對定位(DRVA)指令, 進行單速定位。相對定位(DRVI)的目標位置設定方式采用相對地址的位置即增量式,絕對定位(DRVA)的目標位置設定方式采用絕對地址的位置即絕對量式。(聽起來很繞口)
首先我們需要了解的是增量式和絕對量.。
所謂的增量式就是以當前停止的位置作為起點,指定移動方向和移動量進行定位,簡單來說就是以我現在停的地方作為起點你指定我向哪個方向走多少我就走多少,比如輸入500,就向前走500,輸入-1000,就往后退1000。

所謂的絕對方式就是以原點為基準指定位置(絕對地址)進行定位,起點在哪里都沒有關系,就是說與現在我停在哪地方無關,只與原點做比較,比如我現在在100的位置,我們輸入100,是不會動的,輸入500,會向前走400,輸入-500,會向后退600,因為只和原點做比較,現在在100的位置,輸入100與原點比較無變化,輸入500,源原點做比較還差400,所以往前走400,輸入-500,與原點比較,發現不僅要走100回到原點還要往回再走500加起來就是600。
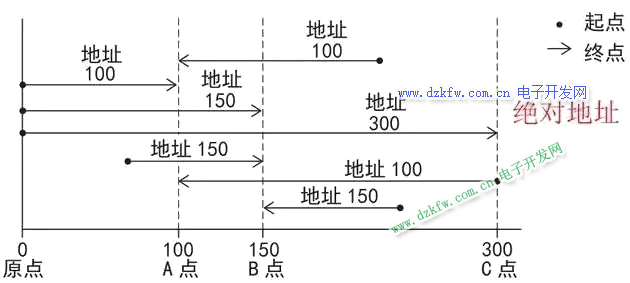
現在明白它們的區別了嗎,相對位置是多少就走多少,絕對位置是一個位置數據,它走多少和走的方向要計算現在的位置與絕對位置之間的距離差。通俗的將就是,一個指定距離,一個指定目的。
兩個指令都帶有加減速時間、基底、最高速度設置,而且都有脈沖發送完成標志位M8029,其他的相關軟元件與PLSV類似。
這里主要強調下旋轉方向的變換,對于DRVI,當脈沖輸出值(相對地址)為正數時正轉,脈沖寄存器的脈沖當前值增加,當脈沖輸出值為負時反轉,脈沖寄存器的脈沖當前值減少,比如設置脈沖輸出數為10000,則電機正轉,脈沖輸出數為-5000時反轉。
對于DRVA,它的正反轉需要由脈沖輸出值(絕對地址)與當前寄存器中的大小做比較,比如當前寄存器為1000,我們設置脈沖輸出數為4000,則電機正轉,如果設置脈沖輸出數為500,則電機反轉。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底