
Ê╗íó▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)¤Á¢y(t¿»ng)
▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)¤Á¢y(t¿»ng)░³║¼▓¢▀M(j¿¼n)ÙèäË(d¿░ng)ÖC(j¿®)║═▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)ã¸ú¼Ã░Â╦Ë╔PLC░l(f¿í)├}ø_íú
▓¢▀M(j¿¼n)ÙèÖC(j¿®)╩ÃîóÙè├}ø_ð┼╠û(h¿ño)ÌD(zhu¿ún)Îâ?y¿¡u)?STRONG>¢Ã╬╗Êã╗‗¥Ç╬╗ÊãÊÈ┐ÏÍãÌD(zhu¿ún)ÎËÌD(zhu¿ún)äË(d¿░ng)Á─Ú_¡h(hu¿ón)┐ÏÍãÙèÖC(j¿®)ú¿┐╔ÊÈ═¿▀^░▓Ðb¥Ä┤aã¸ð╬│╔Ú]¡h(hu¿ón)¤Á¢y(t¿»ng)ú®íú
╦³ð²ÌD(zhu¿ún)╩ÃÊÈ╣╠¿Á─¢ÃÂ╚ú¿▓¢¥Ó¢Ãú®Ê╗▓¢Ê╗▓¢▀\(y¿┤n)ððÁ─ú¼╣╩ÀQ▓¢▀M(j¿¼n)ÙèÖC(j¿®)íúÈ┌ÀÃ│¼¦dÁ─ÃÚør¤┬ú¼ÙèÖC(j¿®)Á─ÌD(zhu¿ún)╦┘íó═úÍ╣Á─╬╗Í├Í╗╚íøQË┌├}ø_ð┼╠û(h¿ño)Á─¯l┬╩║═├}ø_öÁ(sh¿┤)ú¼Â°▓╗╩▄Ïô(f¿┤)¦dÎâ╗»Á─Ë░Ýæú¼Ê‗┤╦¥▀Ëð¦^©▀Á─¿╬╗¥½Â╚íú
▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)ã¸ú¿▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)ÙèÈ┤ú®¤‗ÙèäË(d¿░ng)ÖC(j¿®)└@¢M╠ß╣®├}ø_Ùè┴¸ú¼▓¢▀M(j¿¼n)ÙèäË(d¿░ng)ÖC(j¿®)Á─▀\(y¿┤n)ðððÈ─▄øQ¿Ë┌ÙèäË(d¿░ng)ÖC(j¿®)┼c▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)ã¸Á─┴╝║├┼õ║¤íú
ÙèÖC(j¿®)Á─Ýææ¬(y¿®ng)âHË╔öÁ(sh¿┤)Îͦö╚Ù├}ø_┤_¿ú¼Ê‗°┐╔ÊÈ▓╔Ë├Ú_¡h(hu¿ón)┐ÏÍãú¼▀@╩╣Á├ÙèÖC(j¿®)Á─¢Y(ji¿ª)ÿï(g¿░u)┐╔ÊÈ▒╚¦^║å(ji¿ún)å╬°ÃÊ┐ÏÍã│╔▒¥íú
Â■íó ▓¢▀M(j¿¼n)ÙèÖC(j¿®)╗¨▒¥È¡└Ý
▓¢▀M(j¿¼n)ÙèÖC(j¿®)╩ÃÊ╗ÀNË├Ùè├}ø_▀M(j¿¼n)ðð┐ÏÍãú¼îóÙè├}ø_(öÁ(sh¿┤)ÎÍð┼╠û(h¿ño))ÌD(zhu¿ún)╗»×Ú¢Ã╬╗ÊãÁ─ê╠(zh¿¬)ððÖC(j¿®)ÿï(g¿░u)íú
═¿│ú▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─ÌD(zhu¿ún)ÎË×ÚË└┤┼¾wú¼«ö(d¿íng)Ùè┴¸┴¸▀^¿ÎË└@¢Mòr(sh¿¬)ú¼Â¿ÎË└@¢M«a(ch¿ún)╔·Ê╗╩©┴┐┤┼ê÷(ch¿úng)íú
Èô┤┼ê÷(ch¿úng)ò■(hu¿¼)ĺäË(d¿░ng)ÌD(zhu¿ún)ÎËð²ÌD(zhu¿ún)Ê╗¢ÃÂ╚ú¼╩╣Á├ÌD(zhu¿ún)ÎËÁ─Ê╗îª(du¿¼)┤┼ê÷(ch¿úng)À¢¤‗┼c¿ÎËÁ─┤┼ê÷(ch¿úng)À¢¤‗Ê╗Í┬íú«ö(d¿íng)¿ÎËÁ─╩©┴┐┤┼ê÷(ch¿úng)ð²ÌD(zhu¿ún)Ê╗éÇ(g¿¿)¢ÃÂ╚ú¼ÌD(zhu¿ún)ÎËÊ▓ÙSÍ°Èô┤┼ê÷(ch¿úng)ÌD(zhu¿ún)Ê╗éÇ(g¿¿)¢ÃÂ╚íú
«ö(d¿íng)▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)㸢Ë╩ıÁ¢Ê╗éÇ(g¿¿)├}ø_ð┼╠û(h¿ño)ú¼╦³¥═‗î(q¿▒)äË(d¿░ng)▓¢▀M(j¿¼n)ÙèÖC(j¿®)░┤ÈO(sh¿¿)¿Á─À¢¤‗ÌD(zhu¿ún)äË(d¿░ng)Ê╗éÇ(g¿¿)╣╠¿Á─¢ÃÂ╚ (ÀQ×Ú"▓¢¥Ó¢Ã")ú¼╦³Á─ð²ÌD(zhu¿ún)╩ÃÊÈ╣╠¿Á─¢ÃÂ╚Ê╗▓¢Ê╗▓¢▀\(y¿┤n)ððÁ─íú
▓¢▀M(j¿¼n)ÙèÖC(j¿®)¦ö│÷Á─¢Ã╬╗Êã┼c¦ö╚ÙÁ─├}ø_öÁ(sh¿┤)│╔ı²▒╚ú¼ÌD(zhu¿ún)╦┘┼c├}ø_¯l┬╩│╔ı²▒╚ú¼©─Îâ└@¢M═¿ÙèÁ─Ýÿð‗ú¼ÙèÖC(j¿®)¥═ò■(hu¿¼)À┤ÌD(zhu¿ún)íúÊ‗┤╦ú║
┐╔ÊÈ═¿▀^┐ÏÍã├}ø_éÇ(g¿¿)öÁ(sh¿┤)üÝ(l¿ói)┐ÏÍã¢Ã╬╗Êã┴┐ú¼Å─°▀_(d¿ó)Á¢£╩(zh¿│n)┤_¿╬╗Á──┐Á─ú╗
┐╔ÊÈ═¿▀^┐ÏÍã├}ø_¯l┬╩üÝ(l¿ói)┐ÏÍãÙèÖC(j¿®)ÌD(zhu¿ún)äË(d¿░ng)Á─╦┘Â╚║═╝Ë╦┘Â╚ú¼Å─°▀_(d¿ó)Á¢ı{(di¿ño)╦┘Á──┐Á─ú╗
┐╔ÊÈ═¿▀^┐ÏÍã└@¢M═¿ÙèÝÿð‗ú¼▀_(d¿ó)Á¢┐ÏÍãÙèÖC(j¿®)ı²À┤ÌD(zhu¿ún)Á──┐Á─íú
╚²íó▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─͸ʬàóöÁ(sh¿┤)┼c╝╝ðg(sh¿┤)Í©ÿ╦(bi¿ío)
▓¢▀M(j¿¼n)ÙèÖC(j¿®)͸ʬàóöÁ(sh¿┤)░³└¿ú║¯~¿Ùèë║íó¯~¿Ùè┴¸íó¤ÓöÁ(sh¿┤)íó▓¢¥Ó¢Ãíó▓¢¥Ó¢Ãı`▓¯íóί┤¾ýoÌD(zhu¿ún)¥Ïíó┐ı¦dãäË(d¿░ng)¯l┬╩íóί©▀▀\(y¿┤n)ðð¯l┬╩Á╚íú
3.1 ¤ÓöÁ(sh¿┤)
╩ÃÍ©ÙèÖC(j¿®)â╚(n¿¿i)▓┐Á─¥Ç╚ª¢MöÁ(sh¿┤)ú¼─┐Ã░│úË├Á─Ëðâ╔¤Óíó╚²¤Óíó╬Õ¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)íú
3.2 ┼─öÁ(sh¿┤)
═Û│╔Ê╗éÇ(g¿¿)┤┼ê÷(ch¿úng)Í▄ã┌ðÈÎâ╗»┐sðÞ├}ø_öÁ(sh¿┤)╗‗?q¿▒)ºÙèá¯æB(t¿ñi)ú¼Ë├m▒Ý╩¥ú¼╗‗Í©ÙèÖC(j¿®)ÌD(zhu¿ún)▀^Ê╗éÇ(g¿¿)²X¥Ó¢Ã╦¨ðÞ├}ø_öÁ(sh¿┤)íú
3.3 ▒ú│ÍÌD(zhu¿ún)¥Ï
╩ÃÍ©▓¢▀M(j¿¼n)ÙèÖC(j¿®)═¿ÙèÁ½ø]ËðÌD(zhu¿ún)äË(d¿░ng)òr(sh¿¬)ú¼Â¿Î˵iÎíÌD(zhu¿ún)ÎËÁ─┴ª¥Ïíú
(Îóú║═¿│ú▓¢▀M(j¿¼n)ÙèÖC(j¿®)È┌Á═╦┘òr(sh¿¬)Á─┴ª¥Ï¢Ë¢³▒ú│ÍÌD(zhu¿ún)¥Ïíú╚╦éâ│úıf(shu¿¡)Á─2NíñMÁ─▓¢▀M(j¿¼n)ÙèÖC(j¿®)ú¼È┌ø]Ëð╠Ï╩Ôıf(shu¿¡)├¸Á─ÃÚør¤┬╩ÃÍ©▒ú│ÍÌD(zhu¿ún)¥Ï×Ú2NíñMÁ─▓¢▀M(j¿¼n)ÙèÖC(j¿®))
3.4 ¿╬╗ÌD(zhu¿ún)¥Ï
ÙèÖC(j¿®)È┌▓╗═¿Ùèá¯æB(t¿ñi)¤┬ú¼ÙèÖC(j¿®)ÌD(zhu¿ún)ÎËÎÈ╔ÝÁ─µi¿┴ª¥Ïíú
3.5 ▓¢¥Ó¢Ã
îª(du¿¼)æ¬(y¿®ng)Ê╗éÇ(g¿¿)├}ø_ð┼╠û(h¿ño)ú¼ÙèÖC(j¿®)ÌD(zhu¿ún)ÎËÌD(zhu¿ún)▀^Á─¢Ã╬╗Êãíú
3.6 ╩º▓¢
ÙèÖC(j¿®)▀\(y¿┤n)ÌD(zhu¿ún)òr(sh¿¬)▀\(y¿┤n)ÌD(zhu¿ún)Á─▓¢öÁ(sh¿┤)ú¼▓╗Á╚┼c└Ýıô╔¤Á─▓¢öÁ(sh¿┤)íú
3.7 ╩ºı{(di¿ño)¢Ã
ÌD(zhu¿ún)Î˲X¦S¥Çã½Êã¿Î˲X¦S¥ÇÁ─¢ÃÂ╚ú¼ÙèÖC(j¿®)▀\(y¿┤n)ÌD(zhu¿ún)▒Ï┤µÈ┌╩ºı{(di¿ño)¢Ãú¼Ë╔╩ºı{(di¿ño)¢Ã«a(ch¿ún)╔·Á─ı`▓¯ú¼▓╔Ë├╝Ü(x¿¼)ÀÍ‗î(q¿▒)äË(d¿░ng)╩Ã▓╗─▄¢ÔøQÁ─íú
3.8 ▀\(y¿┤n)ðð¥Ï¯l╠ÏðÈ
ÙèÖC(j¿®)È┌─│ÀN£y(c¿¿)Èçùl╝■¤┬£y(c¿¿)Á├▀\(y¿┤n)ððÍð¦ö│÷┴ª¥Ï┼c¯l┬╩ÛP(gu¿ín)¤ÁÁ─÷¥Çíú
╦─íó▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)ã¸È¡└Ý
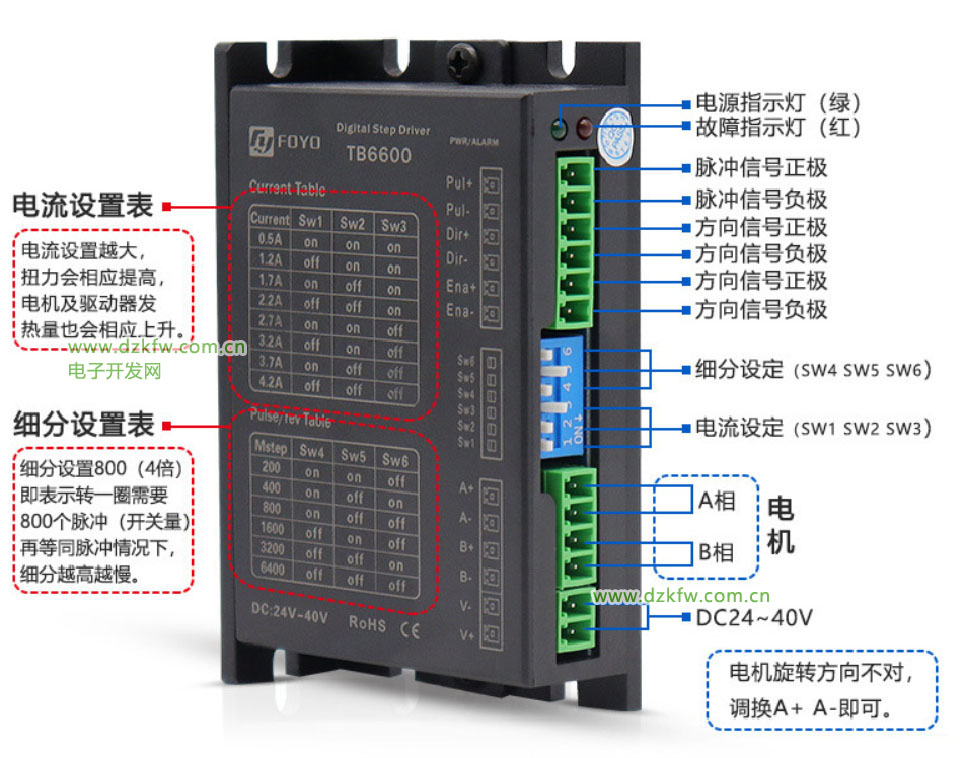
3.1 ┐ÏÍãð┼╠û(h¿ño)¢Ë┐┌
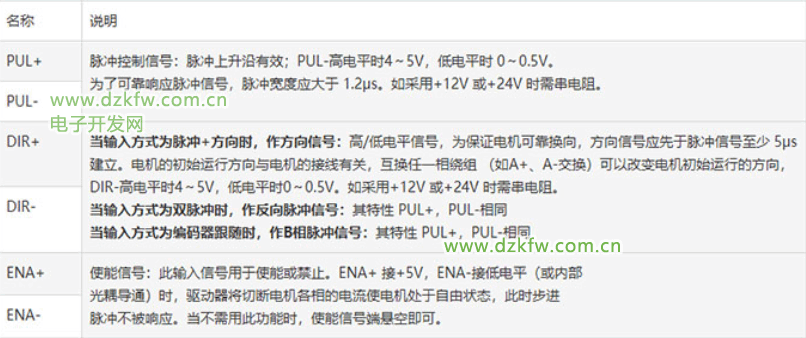
3.2 ╣ª┬╩¢Ë┐┌

3.3 ô▄┤a║¼┴x
3.4 á¯æB(t¿ñi)Í©╩¥
¥G╔½ LED ×ÚÙèÈ┤Í©╩¥ƒ¶ú¼«ö(d¿íng)‗î(q¿▒)äË(d¿░ng)㸢Ë═¿ÙèÈ┤òr(sh¿¬)ú¼Èô LED │ú┴┴ú╗
«ö(d¿íng)‗î(q¿▒)äË(d¿░ng)ã¸ÃðöÓÙèÈ┤òr(sh¿¬)ú¼ÈôLED ¤¿£þíú╝t╔½ LED ×Ú╣╩ı¤Í©╩¥ƒ¶ú¼«ö(d¿íng)│÷¼F(xi¿ñn)╣╩ı¤òr(sh¿¬)ú¼ÈôÍ©╩¥ƒ¶©¨ô■(j¿┤)╣╩ı¤¯Éð═ú¼ÊÈ0.2├ÙС¡h(hu¿ón)ÚWáqÈO(sh¿¿)¿Á─┤╬öÁ(sh¿┤)ú¼╚╗║¾ÊÈ1├ÙÚg©¶└^└m(x¿┤)ÍÏÅ═(f¿┤)ÊÈ0.2├ÙС¡h(hu¿ón)ÚWáqÈO(sh¿¿)¿Á─┤╬öÁ(sh¿┤)íú
Í▒Á¢╣╩ı¤▒╗Ë├æ¶ÃÕ│²ú¼╝t╔½ LED│ú£þíú╣╩ı¤¯Éð═îª(du¿¼)æ¬(y¿®ng)Á─ÚWáq┤╬öÁ(sh¿┤)╚þ¤┬▒Ýú║

3.5 â╔¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)à^(q¿▒)ÀͤÓð‗Á─À¢À¿
À¢À¿Ê╗
â╔¤Ó╦─¥ÇÂ╝ø]ËðÂ╠¢Ëòr(sh¿¬)ú¼ð²ÌD(zhu¿ún)▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─¦Sú¼┤╦òr(sh¿¬)ÌD(zhu¿ún)¦Sæ¬(y¿®ng)Èô▒╚¦^╚¦ÊÎÌD(zhu¿ún)äË(d¿░ng)íú
îó╚╬ÊÔâ╔©¨¥ÇÂ╠¢Ëú¼╚╗║¾ð²ÌD(zhu¿ún)▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─¦Sú¼┤╦òr(sh¿¬)╚¶▒╚¦^└ºÙyÌD(zhu¿ún)äË(d¿░ng)ú¼ätıf(shu¿¡)├¸Èôâ╔©¨¥Ç×Ú═¼¤Óð‗íúÀ±ät×Ú▓╗═¼¤Óð‗íú
À¢À¿Â■
îó╚f(w¿ñn)Ë├▒Ý┤‗Á¢ÙèÎÞÖnú¼╚╬ÊÔâ╔©¨¥Ç¢ËÁ¢╚f(w¿ñn)Ë├▒Ý╝t║┌â╔Â╦ú¼╚¶┤╦òr(sh¿¬)ÙèÎÞ¦^ðíòr(sh¿¬)ú¼ätıf(shu¿¡)├¸Èôâ╔¥Ç×Ú═¼¤Óú╗╚¶ÙèÎÞƒo(w¿▓)©F┤¾òr(sh¿¬)ú¼ätıf(shu¿¡)├¸Èôâ╔¥Ç×ÚÀÃ═¼¤Óíú
3.6 ┐ÏÍãð┼╠û(h¿ño)┼c▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)㸢˥ÇÀ¢À¿
╚ı¤ÁPLCú¿ÜW─À²êíó▒©úÁ╚ú®¦ö│÷Q³c(di¿ún)╩ÃÁ═Ùèã¢ú¼Ê‗┤╦¢Ë▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)ã¸Á─PUL-/DIR-ú¼▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)ã¸Á─PUL+/DIR+╣▓Ûû(y¿óng)ÿOú¼¢Ë24Víú
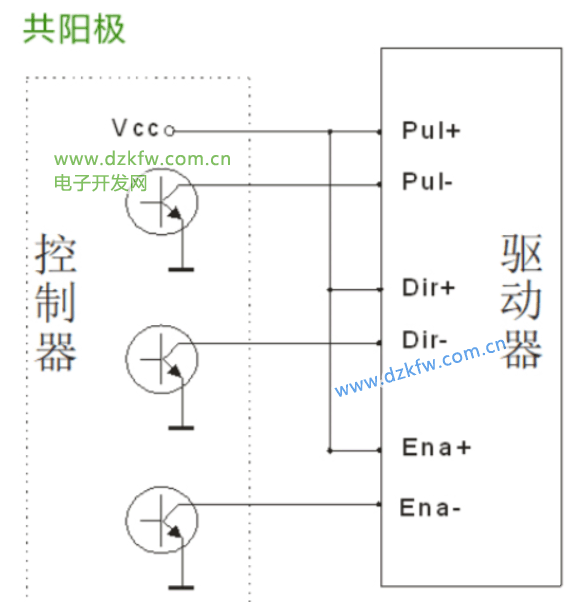
ÜW¤ÁPLCú¿╬¸ÚTÎËÁ╚ú®¦ö│÷Q³c(di¿ún)╩é▀Ùèã¢ú¼Ê‗┤╦¢Ë▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)ã¸Á─PUL+/DIR+ú¼▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)ã¸Á─PUL-/DIR-╣▓ÛÄÿOú¼¢Ë0Víú
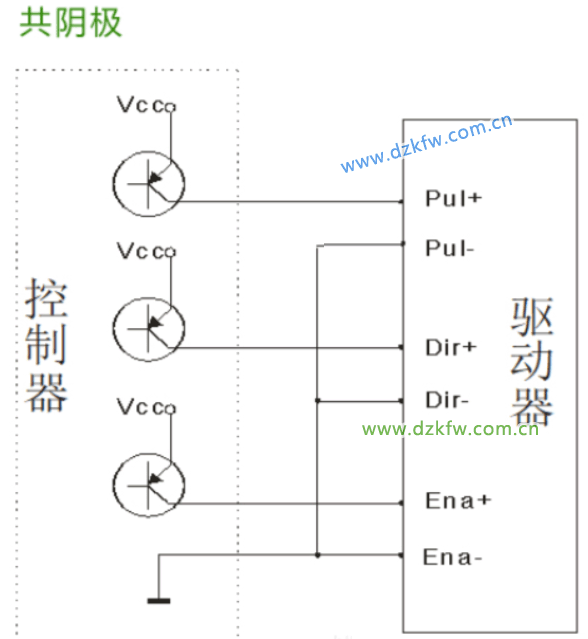
Ena+/Ena-×Ú├ôÖC(j¿®)ð┼╠û(h¿ño)
┤‗Ú_├ôÖC(j¿®)╣ª─▄║¾ú¼ÙèÖC(j¿®)ÌD(zhu¿ún)ÎË╠ÄË┌ÎÈË╔▓╗µi¿á¯æB(t¿ñi)ú¼┐╔ÊȦp╦╔ÌD(zhu¿ún)äË(d¿░ng)ú¼┤╦òr(sh¿¬)¦ö╚Ù├}ø_ð┼╠û(h¿ño)▓╗Ýææ¬(y¿®ng)ú¼
ÛP(gu¿ín)Ú]┤╦ð┼╠û(h¿ño)║¾ÙèÖC(j¿®)¢Ë╩▄├}ø_ð┼╠û(h¿ño)ı²│ú▀\(y¿┤n)ÌD(zhu¿ún)íú
Îóú║Ê╗░ÒÈ┌îì(sh¿¬)ÙHæ¬(y¿®ng)Ë├Íð┐╔▓╗¢Ëíú
╬ÕíóÛP(gu¿ín)Ë┌▓¢▀M(j¿¼n)ÙèÖC(j¿®)¤ÓöÁ(sh¿┤)íó╝Ü(x¿¼)ÀÍíó▓¢¥Ó¢Ã
╗ý║¤╩¢▓¢▀M(j¿¼n)ÙèÖC(j¿®)¢Y(ji¿ª)║¤┴╦Ë└┤┼╩¢▓¢▀M(j¿¼n)ÙèÖC(j¿®)║═À┤æ¬(y¿®ng)╩¢▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─â×(y¿¡u)³c(di¿ún)íú
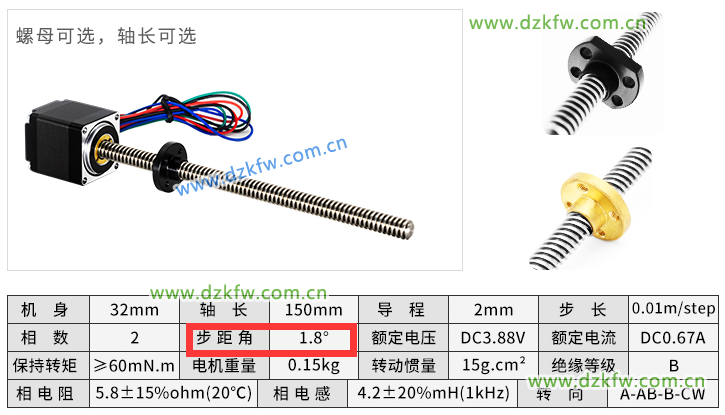
─┐Ã░│úË├Á─ËðÂ■¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)íó╚²¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)íó╬Õ¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)ú║â╔¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)▓¢▀M(j¿¼n)¢ÃÊ╗░Ò×Ú1.8Â╚║═0.9Â╚ú¼╚²¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)▓¢¥Ó¢Ã×Ú1.2Â╚ú¼╬Õ¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)▓¢▀M(j¿¼n)¢ÃÊ╗░Ò×Ú 0.72Â╚íú
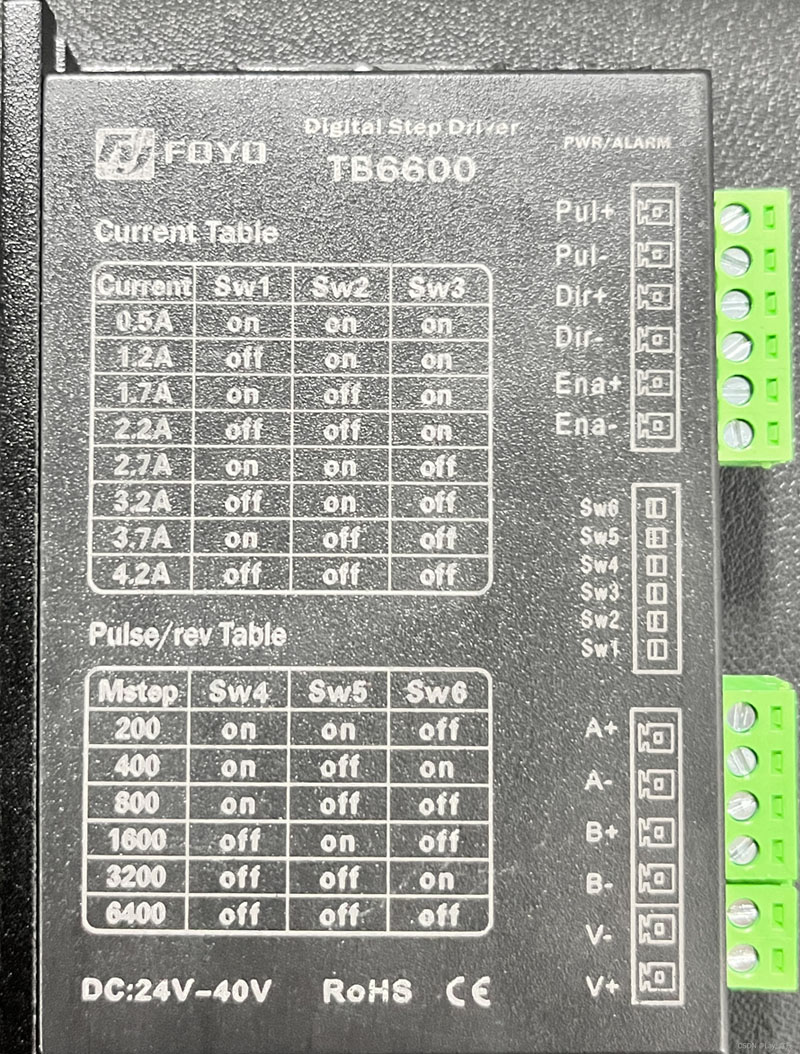
5.1 ▓¢▀M(j¿¼n)ÙèÖC(j¿®)╣╠Ëð▓¢¥Ó¢Ã
╦³▒Ý╩¥┐ÏÍã¤Á¢y(t¿»ng)├┐░l(f¿í)Ê╗éÇ(g¿¿)▓¢▀M(j¿¼n)├}ø_ð┼╠û(h¿ño)ú¼▓¢▀M(j¿¼n)ÙèÖC(j¿®)╦¨ÌD(zhu¿ún)äË(d¿░ng)Á─¢ÃÂ╚íú
▓¢▀M(j¿¼n)ÙèÖC(j¿®)│÷ÅSòr(sh¿¬)¢o│÷┴╦Ê╗éÇ(g¿¿)▓¢¥Ó¢ÃÁ─ÍÁú¼╚þ╔¤êDÙèÖC(j¿®)¢o│÷Á─ÍÁ×Ú▓¢¥Ó¢Ã╩Ã1.8íÒú¿▒Ý╩¥░Ù▓¢╣ñθòr(sh¿¬)×Ú0.9íÒíóı¹▓¢╣ñθòr(sh¿¬)×Ú1.8íÒú®ú¼▀@éÇ(g¿¿)▓¢¥Ó¢Ã┐╔ÊÈÀQÍ«×Úí░▓¢▀M(j¿¼n)ÙèÖC(j¿®)╣╠Ëð▓¢¥Ó¢Ãí▒ú¼╦³▓╗Ê╗¿╩ÃÙèÖC(j¿®)îì(sh¿¬)ÙH╣ñθòr(sh¿¬)Á─ıµı²í░▓¢¥Ó¢Ãí░ú¼ıµı²Á─í░▓¢¥Ó¢Ãí░║═▓¢▀M(j¿¼n)ÙèÖC(j¿®)‗î(q¿▒)äË(d¿░ng)ã¸╝Ü(x¿¼)ÀÍËðÛP(gu¿ín)íú
5.2 ▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─¤ÓöÁ(sh¿┤)
╩ÃÍ©▓¢▀M(j¿¼n)ÙèÖC(j¿®)â╚(n¿¿i)▓┐Á─¥Ç╚ª¢MöÁ(sh¿┤)ú¼─┐Ã░│úË├Á─ËðÂ■¤Óíó╚²¤Óíó╬Õ¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)íú
¤ÓöÁ(sh¿┤)▓╗═¼ú¼ãõ▓¢¥Ó¢ÃÊ▓▓╗═¼ú¼Ê╗░ÒÂ■¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─▓¢¥Ó¢Ã×Ú0.9íÒ/1.8íÒíó╚²¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─×Ú1.2íÒíó╬Õ¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─×Ú0.72íÒ íú
È┌ø]Ëð╝Ü(x¿¼)ÀÍ‗î(q¿▒)äË(d¿░ng)ã¸òr(sh¿¬)ú¼Ë├æ¶Í¸Ê¬┐┐▀xô±▓╗═¼¤ÓöÁ(sh¿┤)Á─▓¢▀M(j¿¼n)ÙèÖC(j¿®)üÝ(l¿ói)ØMÎÒÎÈ╝║îª(du¿¼)▓¢¥Ó¢ÃÁ─ʬþíú
╚þ╣¹╩╣Ë├▓¢▀M(j¿¼n)ÙèÖC(j¿®)╝Ü(x¿¼)ÀÍ‗î(q¿▒)äË(d¿░ng)ã¸ú¼ätí░¤ÓöÁ(sh¿┤)í░îóÎâÁ├ø]ËðÊÔ┴xú¼Ë├æ¶Í╗ðÞÈ┌▓¢▀M(j¿¼n)ÙèÖC(j¿®)‗î(q¿▒)äË(d¿░ng)ã¸╔¤©─Îâ╝Ü(x¿¼)ÀÍ?j¿½n)?sh¿┤)ú¼¥═┐╔ÊÈ©─Îâ├}ø_«ö(d¿íng)┴┐íú╝┤Í©Á─╩ÃÊ╗éÇ(g¿¿)├}ø_ÙèÖC(j¿®)ÌD(zhu¿ún)äË(d¿░ng)Á─¢ÃÂ╚íú
5.3 ▓¢▀M(j¿¼n)ÙèÖC(j¿®)╝Ü(x¿¼)ÀÍ?j¿½n)?sh¿┤)
╝Ü(x¿¼)ÀÍ╩Ã‗î(q¿▒)äË(d¿░ng)ã¸îó╔¤╬╗ÖC(j¿®)░l(f¿í)│÷Á─├┐éÇ(g¿¿)├}ø_░┤‗î(q¿▒)äË(d¿░ng)ã¸ÈO(sh¿¿)¿Á─╝Ü(x¿¼)ÀÍ▒ÂöÁ(sh¿┤)║¾îª(du¿¼)ÙèÖC(j¿®)▀M(j¿¼n)ðð┐ÏÍãíú
║å(ji¿ún)å╬Á─ıf(shu¿¡)ú¼¥═╩ÃÈ┌ÙèÖC(j¿®)Á─▓¢¥Ó¢Ã░┤ıı╝Ü(x¿¼)ÀÍ▒Â┬╩▀M(j¿¼n)ðð┐sðííú
▒╚╚þ1.8íÒ▓¢¥Ó¢ÃÁ─▓¢▀M(j¿¼n)ÙèÖC(j¿®)ú¼‗î(q¿▒)äË(d¿░ng)ã¸╝Ü(x¿¼)ÀÍÈO(sh¿¿)Í├×Ú32ú¼ät├}ø_«ö(d¿íng)┴┐1.8íÒ/32=0.05625íÒíú
╗‗ı▀Ê▓┐╔ÊÈ└Ý¢Ô×Ú├┐ÌD(zhu¿ún)Ê╗╚ª×Ú200éÇ(g¿¿)├}ø_ú¼╝Ü(x¿¼)ÀÍ×Ú32▒Âú¼─Ã├┤▓¢▀M(j¿¼n)ÙèÖC(j¿®)‗î(q¿▒)äË(d¿░ng)ã¸ðÞʬ¦ö│÷200*32=6400éÇ(g¿¿)├}ø_▓¢▀M(j¿¼n)ÙèÖC(j¿®)▓┼ÌD(zhu¿ún)Ê╗╚ªíú
═¿│ú╝Ü(x¿¼)ÀÍËð2íó4íó8íó16íó32íó64íó128íó256íóãı═¿ê÷(ch¿úng)¥░æ¬(y¿®ng)Ë├¤┬¢¿Îh╝Ü(x¿¼)ÈO(sh¿¿)Í├È┌10000ξËÊ╝┤┐╔ú¼╝Ü(x¿¼)ÀÍ͸ʬ╩é─╔ãÙèÖC(j¿®)Á─▀\(y¿┤n)ðððÈ─▄ú¼╩╣▓¢▀M(j¿¼n)ÙèÖC(j¿®)▀\(y¿┤n)ðð©³ã¢ÀÇ(w¿ºn)ú¼ÈÙʶ©³ðííú
┼e└²ıf(shu¿¡)├¸ú║
â╔¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─╗¨▒¥▓¢¥Ó¢Ã╩Ã1.8íÒú¼╝┤Ê╗éÇ(g¿¿)├}ø_Î▀1.8íÒú¼╚þ╣¹ø]Ëð╝Ü(x¿¼)ÀÍú¼ät╩Ã200éÇ(g¿¿)├}ø_Î▀Ê╗╚ª360íÒíú
╝Ü(x¿¼)ÀÍ╩Ã═¿▀^‗î(q¿▒)äË(d¿░ng)ã¸┐┐¥½┤_┐ÏÍãÙèÖC(j¿®)Á─¤ÓÙè┴¸╦¨«a(ch¿ún)╔·Á─ú¼┼cÙèÖC(j¿®)ƒo(w¿▓)ÛP(gu¿ín)íú╚þ╣¹╩Ã10╝Ü(x¿¼)ÀÍú¼ät░l(f¿í)Ê╗éÇ(g¿¿)├}ø_ÙèÖC(j¿®)Î▀0.18íÒú¼╝┤2000éÇ(g¿¿)├}ø_Î▀Ê╗╚ª360íÒú¼ÙèÖC(j¿®)Á─¥½Â╚─▄À±▀_(d¿ó)Á¢╗‗¢Ë¢³0.18íÒú¼▀Ç╚íøQË┌╝Ü(x¿¼)ÀÍ‗î(q¿▒)äË(d¿░ng)ã¸Á─╝Ü(x¿¼)ÀÍÙè┴¸┐ÏÍ㥽Â╚Á╚ãõ╦³Ê‗╦Ïíú
▓╗═¼ÅS╝ÊÁ─╝Ü(x¿¼)ÀÍ‗î(q¿▒)äË(d¿░ng)㸥½Â╚┐╔─▄▓¯äe║▄┤¾ú╗╝Ü(x¿¼)ÀÍ?j¿½n)?sh¿┤)È¢┤¾¥½Â╚È¢Ùy┐ÏÍãíúÊÈ┤╬¯É═ãíú
╚²¤Ó▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─╗¨▒¥▓¢¥Ó¢Ã╩Ã1.2íÒú¼╝┤Ê╗éÇ(g¿¿)├}ø_Î▀1.2íÒú¼╚þ╣¹ø]Ëð╝Ü(x¿¼)ÀÍú¼ät╩Ã300éÇ(g¿¿)├}ø_Î▀Ê╗╚ª360íÒú¼╚þ╣¹╩Ã10╝Ü(x¿¼)ÀÍú¼ät░l(f¿í)Ê╗éÇ(g¿¿)├}ø_ú¼ÙèÖC(j¿®)Î▀0.12íÒú¼╝┤3000éÇ(g¿¿)├}ø_Î▀Ê╗╚ª360íÒú¼ÊÈ┤╬¯É═ãíú
5.4 ▒ú│ÍÌD(zhu¿ún)¥Ï
╩ÃÍ©▓¢▀M(j¿¼n)ÙèÖC(j¿®)═¿ÙèÁ½ø]ËðÌD(zhu¿ún)äË(d¿░ng)òr(sh¿¬)ú¼Â¿Î˵iÎíÌD(zhu¿ún)ÎËÁ─┴ª¥Ïíú╦³╩Ã▓¢▀M(j¿¼n)ÙèÖC(j¿®)ίÍÏʬÁ─àóöÁ(sh¿┤)Í«Ê╗ú¼═¿│ú▓¢▀M(j¿¼n)ÙèÖC(j¿®)È┌Á═╦┘òr(sh¿¬)Á─┴ª¥Ï¢Ë¢³▒ú│ÍÌD(zhu¿ún)¥Ïíú
Ë╔Ë┌▓¢▀M(j¿¼n)ÙèÖC(j¿®)Á─¦ö│÷┴ª¥ÏÙS╦┘Â╚Á─È÷┤¾Â°▓╗öÓ╦Ñ£pú¼¦ö│÷╣ª┬╩Ê▓ÙS╦┘Â╚Á─È÷┤¾Â°Îâ╗»ú¼╦¨ÊÈ▒ú│ÍÌD(zhu¿ún)¥Ï¥═│╔×Ú┴╦║Ô┴┐▓¢▀M(j¿¼n)ÙèÖC(j¿®)ίÍÏʬÁ─àóöÁ(sh¿┤)Í«Ê╗íú
▒╚╚þú¼«ö(d¿íng)╚╦éâıf(shu¿¡)1N.mÁ─▓¢▀M(j¿¼n)ÙèÖC(j¿®)ú¼È┌ø]Ëð╠Ï╩Ôıf(shu¿¡)├¸Á─ÃÚør¤┬╩ÃÍ©▒ú│ÍÌD(zhu¿ún)¥Ï×Ú1N.mÁ─▓¢▀M(j¿¼n)ÙèÖC(j¿®)íú

┴¨íó │úÊèåû¯}╝░¢Ô┤
1íóåûú║│§┤╬╩╣Ë├Èô▓¢▀M(j¿¼n)‗î(q¿▒)äË(d¿░ng)ã¸ú¼╚þ║╬─▄▒M┐ý╔¤╩Íú┐
┤ú║ı²┤_¢Ë║├ÙèÈ┤║═ÙèÖC(j¿®)║¾ú¼Í╗¢Ë├}ø_ð┼╠û(h¿ño)PUL(¤╚îó¯l┬╩ÈO(sh¿¿)Í├×Ú1KÊÈâ╚(n¿¿i))ú¼╝Ü(x¿¼)ÀÍÈO(sh¿¿)Í├×Ú16ú¼À¢¤‗║═├ôÖC(j¿®)æÊ┐ıú¼┤╦òr(sh¿¬)╝ËÙè║¾ÙèÖC(j¿®)─¼ıJ(r¿¿n)ı²ÌD(zhu¿ún)íú▀\(y¿┤n)ððƒo(w¿▓)ı`║¾È┘Ê└┤╬£y(c¿¿)Èç╝Ë╦┘(╠ß©▀¯l┬╩)íóÀ¢¤‗íó╝Ü(x¿¼)ÀÍ║═├ôÖC(j¿®)Á╚╣ª─▄íú
2íóåûú║┐ÏÍãð┼╠û(h¿ño)©▀Ë┌5Vú¼Ê╗¿ʬ╝Ë┤«┬ô(li¿ón)ÙèÎÞåßú┐
┤ú║╩ÃÁ─ú¼À±ätËð┐╔─▄ƒ²Üº‗î(q¿▒)äË(d¿░ng)ã¸┐ÏÍã¢Ë┐┌Á─Ùè┬Àíú
3íóåûú║¢Ë¥Ç║¾ÙèÈ┤Í©╩¥ƒ¶┴┴ú¼Á½ÙèÖC(j¿®)▓╗ÌD(zhu¿ún)ú¼╩Ã╩▓├┤È¡Ê‗ú┐
┤ú║╚þ╣¹¢Ë¥Çı²┤_ú¼Á½╚È╚╗▓╗ÌD(zhu¿ún)ú¼ıf(shu¿¡)├¸┐ÏÍã▓┐ÀÍ‗î(q¿▒)äË(d¿░ng)─▄┴ª▓╗ë‗ú¼▀@ÀNÃÚørÂÓ│÷¼F(xi¿ñn)È┌Ë├å╬ã¼ÖC(j¿®)Á─io┐┌Í▒¢Ë┐ÏÍãÀ¢╩¢íúıê(q¿½ng)┤_▒ú┐ÏÍã¢Ë┐┌Ëð5mAÁ─‗î(q¿▒)äË(d¿░ng)─▄┴ªíú
4íóåûú║╚þ║╬┼ðöÓ▓¢▀M(j¿¼n)ÙèÖC(j¿®)╦─ùl¥ÇÁ─¿┴xú┐
┤ú║îóÙèÖC(j¿®)Á─╚╬ÊÔâ╔ùl¥Ç¢ËÈ┌Ê╗ãú¼┤╦òr(sh¿¬)Ë├╩Í?j¿½n)QÙèÖC(j¿®)ÌD(zhu¿ún)ÎËËðÎÞ┴ªú¼ät▀@â╔ùl¥Ç╩Ã═¼Ê╗¤Óú¼┐╔¢ËÈ┌‗î(q¿▒)äË(d¿░ng)ã¸A+íóA-ú╗┴Ý═Ôâ╔ùl¥ÇÂ╠¢Ë╚È╚╗ËðÎÞ┴ªú¼ätîó▀@â╔ùl¥Ç¢ËÈ┌B+║═B-íú
5íóåûú║ÙèÖC(j¿®)Á─ı²À┤ÌD(zhu¿ún)ÃÚør┼cæ¬(y¿®ng)îì(sh¿¬)ÙH▀_(d¿ó)Á¢Á─¤ÓÀ┤ú┐
┤ú║Í╗ðÞʬ░ÐÙèÖC(j¿®)ãõÍðÊ╗¤ÓÁ─â╔©¨¥Ç╗ÑôQ¢Ë╚Ù╝┤┐╔íú
1.ÙèÖC(j¿®)ð²ÌD(zhu¿ún)Ùè┴¸Í¿Í¿┬òʶ▀^┤¾ PWM¯l┬╩▀^Á═ ©─ÎâÀ¢À¿╠ß©▀¯l┬╩╗‗ı▀£p╔┘╝Ü(x¿¼)ÀÍ?j¿½n)?sh¿┤)
2.‗î(q¿▒)äË(d¿░ng)ã¸ÎÈäË(d¿░ng)öÓÙèòr(sh¿¬) ÈO(sh¿¿)Í├Ùè┴¸▀^┤¾,æ¬(y¿®ng)Èô¢ÁÁ═ÈO(sh¿¿)Í├Ùè┴¸
3.Ùè┴¸ÈO(sh¿¿)Í├ò■(hu¿¼)Ë░ÝæÌD(zhu¿ún)╦┘
4.ÙèÖC(j¿®)▀^áCú¼ÈO(sh¿¿)Í├Á─Ùè┴¸▀^┤¾,æ¬(y¿®ng)Èô¢ÁÁ═ÈO(sh¿¿)Í├Ùè┴¸
5.ENA-║═ENA+▓╗¢Ëú¼▀@╩Ã├ôÖC(j¿®)ð┼╠û(h¿ño)┐ÏÍã
6.PWM¦ö│÷Â╝▓╔Ë├Ú_┬®¦ö│÷ú¼ðÞʬ═Ô¢Ë╔¤└¡5Vú¼▓╗╚╗ø]ËðPWM¦ö│÷
7.«ö(d¿íng)▀xô±ÙèÖC(j¿®)ÌD(zhu¿ún)╦┘¦^┬²òr(sh¿¬),æ¬(y¿®ng)Èô▀xô±©³ÂÓÁ─╝Ü(x¿¼)ÀÍ?j¿½n)?sh¿┤)
 ÀÁ╗ÏÝö▓┐
ÀÁ╗ÏÝö▓┐ ╦óð┬Ýô(y¿¿)├µ
╦óð┬Ýô(y¿¿)├µ ¤┬Á¢Ýô(y¿¿)ÁÎ
¤┬Á¢Ýô(y¿¿)ÁÎ