
兩種步進電機控制系統(tǒng)原理
一、步進電機控制原理(開環(huán)控制)
PLC或上位機發(fā)送脈沖頻率、脈沖數(shù)量、電動機運行方向信號給到步進驅動器,步進驅動器驅動步進電動機運轉,步進電動機帶動機械部分運動。步進電動機沒有反饋位置信號給步進驅動器。
優(yōu)點:步進驅動器驅動的步進電動機的選型范圍廣,設置簡單,易調節(jié),較便宜。
缺點:丟步,定位不準。
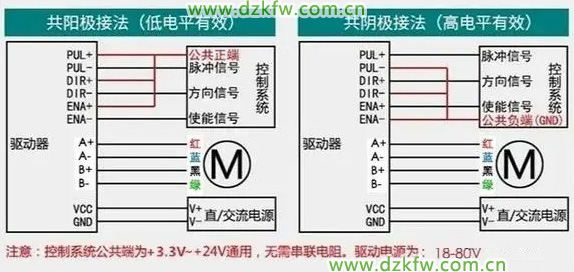 共陽極接法和共陰極接法的步進電機接線圖
共陽極接法和共陰極接法的步進電機接線圖
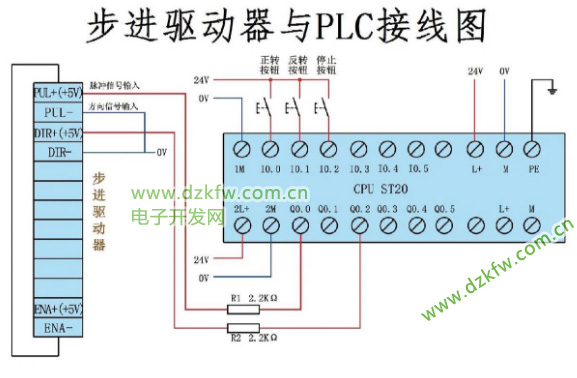
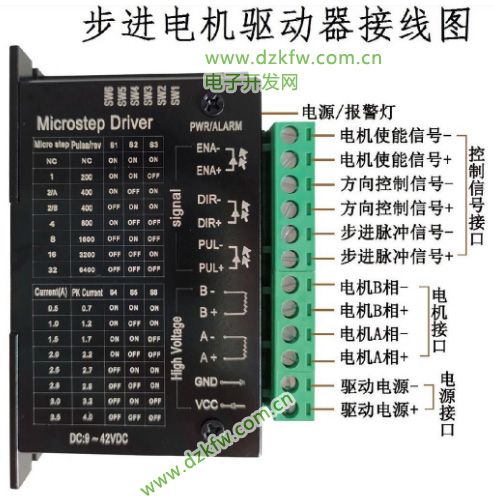
步進電機驅動器的接線圖及plc接線方法
步進電機接線
典型步進驅動器接線圖
接線主要有3個方面:
1、電源,包括驅動器電源和脈沖方向信號電源,小型步進有的是使用同一個24電源,有的是單獨給驅動配一個電源,一般是36-90V的。
2、電機接線:電機一般是AB兩個繞組。對于步進電機內部結構,我會單獨出一篇文章來介紹的,因為里面有些商業(yè)秘密相關的,不好展示太多。
3、信號:主要包括脈沖、方向。很多場合我們是不接使能端,這個得看你的應用場景
步進電機驅動器接線注意事項:
1、電源不要搞錯,有的信號是24V,有的是5V。這是很多人不注意的地方。如果是5v的,就需要串接電阻來降壓限流。
2、細分要設置好,比如設置1000個脈沖轉一圈,而剛好轉一圈的位移是5mm,那么你在PLC發(fā)一個脈沖移動的距離就是0.005mm.
3、電機方向,如果不想改PLC程序,那就通過把A或B繞組的隨意兩根線調換一下。
二、步進電機控制原理(閉環(huán)控制)
隨著技術的發(fā)展,步進電動機也有安裝編碼器的,反饋位置信號到步進驅動器,組成閉環(huán)控制系統(tǒng),也有的資料叫做步進伺服控制系統(tǒng)。同樣PLC或上位機發(fā)送脈沖頻率、脈沖數(shù)量、電動機運行方向信號給到步進驅動器,步進驅動器驅動步進電動機運轉,步進電動機帶動機械部分運動。
步進伺服控制系統(tǒng)解決了步進電機開環(huán)控制時的丟步問題,提高了定位控制的精度(由編碼器分辨率決定,不會比伺服電機的精度高)。

步進電動機的種類
一、反應式步進電動機
結構簡單、步距角小,轉子開有牙槽,與定子上的牙槽對應。
二、永磁式步進電動機
轉矩大,步距角也大,較節(jié)能。
三、混合式步進電動機
綜合上面兩種步進電動機的優(yōu)點,輸出轉矩大,步距角小,能耗小,運行頻率高,是現(xiàn)在市場上的主流步進電動機。
轉子軸向最里層是稀土材料制成的永磁體,其外面包圍一圈可磁化的硅鋼片,硅鋼片外圓開有牙槽,轉子軸向兩端分別為S極和N極,S極牙槽與N極牙槽錯開位置,對定子產(chǎn)生推力和拉力。定子上也開有牙槽與轉子牙槽對應。
步距角=180/(定子繞組相數(shù)*轉子齒數(shù))

步進驅動器的電路種類
步進驅動器是為步進電動機服務的,作用是使步進電動機產(chǎn)生旋轉磁場,分為兩種電路:
一、單極驅動器電路
步進驅動器所用的電源為直流電源,步進驅動器輸出給步進電動機線圈的直流電流為單方向:如A \B\C\D。

步進電機定子
二、雙極驅動器電路
步進驅動器所用的電源為直流電源,步進驅動器輸出給步進電動機線圈的直流電流為正反方向交替:如A \B\-A\-B。
感謝閱讀指正,關注了解更多!
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底