
編者按:步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機。每輸入一個脈沖信號,轉子就轉動一個角度或前進一步,其輸出的角位移或線位移與輸入的脈沖數成正比,轉速與脈沖頻率成正比。因此,步進電動機又稱脈沖電動機。為此,小編轉發電子說發布的《步進電機有沒有編碼器?步進電機如何加編碼器》,僅供讀者參考。
步進電機工作原理
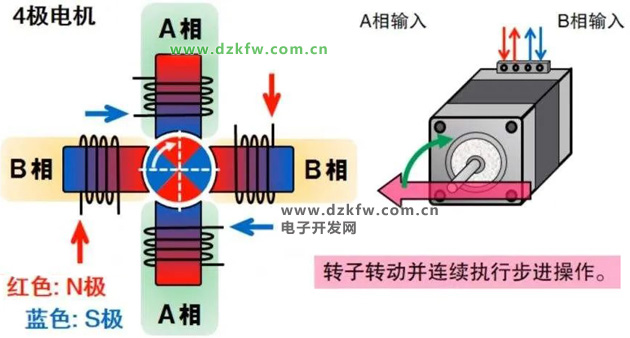
當電流流過定子繞組時,定子繞組產生一矢量磁場。該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。轉子也隨著該磁場轉一個角度。每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數成正比、轉速與脈沖頻率成正比。改變繞組通電的順序,電機就會反轉。所以可用控制脈沖數量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
通常見到的各類電機,內部都是有鐵芯和繞組線圈的。繞組有電阻,通電會產生損耗,損耗大小與電阻和電流的平方成正比,這就是我們常說的銅損,如果電流不是標準的直流或正弦波,還會產生諧波損耗;鐵心有磁滯渦流效應,在交變磁場中也會產生損耗,其大小與材料,電流,頻率,電壓有關,這叫鐵損。
銅損和鐵損都會以發熱的形式表現出來,從而影響電機的效率。步進電機一般追求定位精度和力矩輸出,效率比較低,電流一般比較大,且諧波成分高,電流交變的頻率也隨轉速而變化,因而步進電機普遍存在發熱情況,且情況比一般交流電機嚴重。
步進電機有沒有編碼器
步進電機沒有編碼器 如果你想在步進電機上加編碼器,可以用步進電機雙軸伸,在后面軸上面加編碼器。
步進電機是執行原件,編碼器屬于反饋系統,編碼器配合步進電機使用,用PLC控制其運行。按照原理來講是PLC發送脈沖指令給步進驅動器,驅動器給步進電機提供相應電流使其運行,當編碼器檢測到步進電機運行到需要到達的位置的時候會反饋信號給PLC,PLC安裝反饋的信號停止發送脈沖信號給步進驅動器,當步進電機沒有了電動原提供電流當然也會立刻停止運行。(伺服電機就是此種裝置),其實編碼器會不停的反饋當前位置給PLC,PLC根據反饋值與目標值進行比較,調整轉子轉動的角度。
當然會不會停穩,停止后是不是自己想要的位置,這個要看電機有無制動裝置?當然低速運行的話,一般進給精度都能滿足。
還有一種就是提前計算好步進電機進給需要的脈沖數,然后用PLC編程,運行這么多脈沖數,步進電機停止,編碼器反饋此時電機位置,形成半閉環控制。另外的高速定位,PLC程序里面就可以設置快到位置的時候電機進行減速進給,可滿足定位精度。
步進電機如何加編碼器
步進電機加編碼有點雞肋,就是浪費資源;因為步進電機沒法實時響應,必須有一個加速減速過程;
例:用帶諧波減速器的東方步進馬達,減速比100:1 步距角:0.0072°,想加個編碼器來防止丟步等等,以下是方法:
答:原則上也可以在絲杠的一頭裝電機,另一頭裝編碼器。不過這樣會受到減速機精度的影響,可能出現對丟步的誤判。加編碼器最好是雙出軸的電機,電機后端加編碼器,伺服電機都是這樣做的,除非你是特殊使用或是條件限制(沒有雙出軸)。一般是加工2500線的就可以,線數太高也是浪費。
另外編碼器的分辨率與你的步進電機的分辨率大致相同就好。如果驅動器上細分很高,而又只想檢測是不是丟步了,編碼器的分辨率只要與細分前的分辨率一致或略高就可以了。

步進電機加編碼器的意義
步進電機雖然是可以精確控制的器件,但是是開環的,需要加裝編碼器以實現閉環反饋控制;并可測得步進電機失步和旋轉或移動速度,以用于動態速度控制。對于這種說法,小編覺得第一點開環控制需要編碼器實現閉環反饋還算是可以理解,因為小編自己在使用中,偶爾也會因為步進電機的線連接不好,而導致步進電機并未能正常工作。對于第二點步進電機的速度控制就覺得不是很有必要,因為通過控制步進電機的脈沖頻率就已經能夠實現調速了,實在不覺得有必要再使用外部反饋。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底