
關于Arduino控制舵機在以往的文章中已有介紹,如何通過Arduino使用語音命令控制伺服電機、利用Nodemcu控制SG90舵機、利用MPU6050來控制舵機等等,但是這些文章都是基于單一舵機的控制,也就是說我們控制一個舵機是很容易實現的,那假如我們需要同時控制兩個、三個甚至更多的舵機時該怎么辦呢?
在本文中,我們將向您展示如何使用Arduino來控制多個舵機。用Arduino連接單個舵電機是很容易,但是如果我們把所有的舵機都連接到Arduino的電源引腳上,它們就不能正常工作了,因為Arduino的電流不足以驅動所有舵機。因此,使用Arduino來控制多個舵機,你必須使用單獨的電源。如,5v-2A的獨立電源或9v的電池。
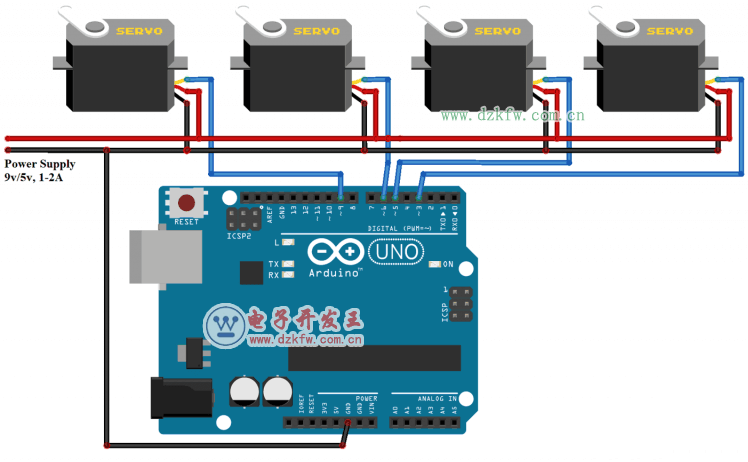
Arduino同時控制多個舵機的電路圖
什么是舵機?
有的朋友對舵機還很陌生,舵機是通俗的叫法,它的正式名字叫伺服電機。建議查看以前的幾篇文章深入了解下:
伺服電機的分類及應用
伺服電機是如何工作的?
什么是PWM:脈沖寬度調制
秒懂舵機角度控制原理
Arduino控制多個舵機代碼解析
Arduino有單獨的舵機支持庫,這個庫可以處理所有與PWM控制相關的工作,也可以用來控制舵機,使用這個庫,我們只需要在servo1.write(angle); 函數中輸入想要旋轉的角度,就可以將舵機旋轉到所需角度了。
因此,開始我們需要引入舵機的庫文件。
#include <Servo.h>
在下面的代碼中,我們將初始化四個舵機,它們分別是Servo1、Servo2、Servo3和Servo4。
Servo servo1; Servo servo2; Servo servo3; Servo servo4;
接下來,設置舵機的輸入引腳。如下面的代碼所示,Servo1連接到Arduino的第三個引腳。你也可以根據自己的需要更改引腳序號,但請記住引腳必須支持PWM,使用的Arduino數字引腳會導致工作不穩定。
void setup() {
servo1.attach(3);
servo2.attach(5);
servo3.attach(6);
servo4.attach(9);
}
現在,在void loop()函數中,將所有的舵機從0度旋轉到180度,然后從180度旋轉到0度。下列代碼中使用的延遲時間是用來增加或減少舵機的響應速度的,因為延遲時間直接影響到變量 i 的增加或減少。
void loop() {
for (int i = 0; i < 180; i++) {
servo1.write(i);
servo2.write(i);
servo3.write(i);
servo4.write(i);
delay(10);
}
for (i = 180; i > 0; i--) {
servo1.write(i);
servo2.write(i);
servo3.write(i);
servo4.write(i);
delay(10);
}
}
Arduino控制多個舵機的完整代碼如下:
#include <Servo.h>
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
int i = 0;
void setup() {
servo1.attach(3);
servo2.attach(5);
servo3.attach(6);
servo4.attach(9);
}
void loop() {
for (i = 0; i < 180; i++) {
servo1.write(i);
servo2.write(i);
servo3.write(i);
servo4.write(i);
delay(10);
}
for (i = 180; i > 0; i--) {
servo1.write(i);
servo2.write(i);
servo3.write(i);
servo4.write(i);
delay(10);
}
}
需要注意的是,當使用外部電源對舵機供電時,需要將外部電源的GND與Arduino的GND連接起來,形成電路的等電位連接,否則會造成運行不穩定或存在干擾。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底