
嚴格來說,步進電機也屬于伺服電機的一種,伺服電機是特指可以精確受控的電機(指轉(zhuǎn)速、轉(zhuǎn)角、行程可控等等),包括直流伺服電機、交流伺服電機、步進電機,但不嚴格時則多數(shù)指交/直流伺服電機。
與交直流伺服電機相比,步進電機最大的特點是轉(zhuǎn)角、轉(zhuǎn)速均可方便的精確控制,控制系統(tǒng)簡單,它采用順序脈沖驅(qū)動,依次序在定子間接入不同脈沖電流次序,導(dǎo)致步進電機的齒間磁力差距而拉動轉(zhuǎn)子轉(zhuǎn)動,控制脈沖的數(shù)量直接對應(yīng)著轉(zhuǎn)子的齒步數(shù),因此不嚴格要求時,可以省略位置傳感器,而且停轉(zhuǎn)后有自鎖能力,控制起來比交直流電機容易得多,所以是最常用的伺服電機,特別是在小功率、小體積的電控機械中居統(tǒng)治地位。
但步進電機最大的缺點是轉(zhuǎn)矩比較小、功率比較小(最大也只是在KW級別),轉(zhuǎn)動的平順性也不算好,一般用于小型機電系統(tǒng)。
而交直流伺服電機的主要優(yōu)點是功率大(可達數(shù)百kw)、轉(zhuǎn)矩大、速度范圍極高(可以極慢也可以極快),而且轉(zhuǎn)矩順滑、抖動小,一般用于大型、高性能數(shù)控系統(tǒng),但交/直流伺服系統(tǒng)的控制都很復(fù)雜,都需要精確的轉(zhuǎn)角傳感器或者位置傳感器做閉環(huán)控制,算法復(fù)雜,而且成本高昂、體積龐大。
直流伺服電機一般采用電壓控制,少數(shù)也可以采用電流控制,電壓或電流與電機的轉(zhuǎn)速之間存在著一定的函數(shù)關(guān)系,控制系統(tǒng)根據(jù)角度傳感器反饋的信號,控制這個電機電壓,最后達到控制電機的轉(zhuǎn)速或轉(zhuǎn)角。

步進電機原理
步進電機作為控制用的特種電機,是將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。當步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以固定的步進角度一步一步運行的。可以通過控制脈沖個數(shù)來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的,改變繞組的通電順序,電機就會反轉(zhuǎn)。
驅(qū)動器原理
步進電機需要使用專用的步進電機驅(qū)動器驅(qū)動,驅(qū)動器由脈沖發(fā)生控制單元、功率驅(qū)動單元、保護單元等組成。功率驅(qū)動單元將脈沖發(fā)生控制單元生成的脈沖放大,與步進電機直接耦合,屬于步進電機與微控制器的功率接口。
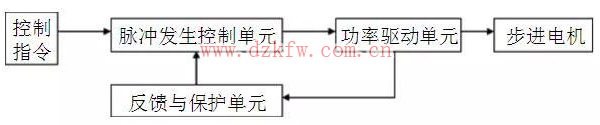
控制指令單元,接收脈沖與方向信號,對應(yīng)的脈沖發(fā)生控制單元對應(yīng)生成一組相應(yīng)相數(shù)的脈沖,經(jīng)過功率驅(qū)動單元后送到步進電機,步進電機在對應(yīng)方向上轉(zhuǎn)過一個步距角。 驅(qū)動器的脈沖給定方式?jīng)Q定了步進電機運行方式,如下:
(1)m相單m拍運行
(2)m相雙m拍運行
(3)m相單、雙m拍運行
(4)細分驅(qū)動,需要驅(qū)動器給出不同幅值的驅(qū)動信號
步進電機有一些重要的技術(shù)數(shù)據(jù),如最大靜轉(zhuǎn)矩、起動頻率、運行頻率等。一般來說步距角越小,電機最大靜轉(zhuǎn)矩越大,則起動頻率和運行頻率越高,所以運行方式中強調(diào)了細分驅(qū)動技術(shù),該方式提高了步進電機的轉(zhuǎn)動力矩和分辨率,完全消除了電機的低頻振蕩。所以細分驅(qū)動器驅(qū)動性能優(yōu)與其他類型驅(qū)動器。
伺服電機內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時電機自帶的編碼器反饋信號給驅(qū)動器,驅(qū)動器根據(jù)反饋值與目標值進行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動的角度。
伺服電機原理
伺服電動機又稱執(zhí)行電動機,在自動控制系統(tǒng)中,用作執(zhí)行元件,把所收到的電信號轉(zhuǎn)換成電動機軸上的角位移或角速度輸出。分為直流和交流伺服電動機兩大類。
伺服電機接收到1個脈沖,就會旋轉(zhuǎn)1個脈沖對應(yīng)的角度,從而實現(xiàn)位移,因為,伺服電機本身具備發(fā)出脈沖的功能,所以伺服電機每旋轉(zhuǎn)一個角度,都會發(fā)出對應(yīng)數(shù)量的脈沖,這樣,和伺服電機接受的脈沖形成了閉環(huán),系統(tǒng)就會知道發(fā)了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉(zhuǎn)動,從而實現(xiàn)精確的定位。
在性能上比較,交流伺服電機要優(yōu)于直流伺服電機,交流伺服電機采用正弦波控制,轉(zhuǎn)矩脈動小,容量可以比較大。直流伺服電機采用梯形波控制,相對差一些。直流伺服電機中無刷伺服電機比有刷伺服電機要性能要好。
伺服電機驅(qū)動器
伺服電機內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時電機自帶的編碼器反饋信號給驅(qū)動器,驅(qū)動器根據(jù)反饋值與目標值進行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動的角度。
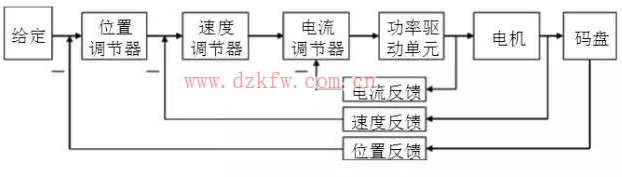
有刷直流伺服電機驅(qū)動器:電動機的工作原理和普通的直流電機完全相同,驅(qū)動器為三閉環(huán)結(jié)構(gòu),從內(nèi)到外分別為電流環(huán)、速度環(huán)、位置環(huán)。電流環(huán)的輸出控制電機的電樞電壓,電流環(huán)的輸入為速度環(huán)PID的輸出,速度環(huán)的輸入為位置環(huán)的PID輸出,位置環(huán)的輸入即是給定輸入,控制原理圖如上圖。
無刷直流伺服電機驅(qū)動器:供電電源為直流,經(jīng)過內(nèi)部的三相逆變器逆變成U/V/W的交流電,供給電動機,驅(qū)動器同樣采用三閉環(huán)控制結(jié)構(gòu)(電流環(huán)、速度環(huán)、位置環(huán)),驅(qū)動控制原理同上。
交流伺服電機驅(qū)動器:大體可以劃分為功能比較獨立的功率板和控制板兩個模塊,控制板通過相應(yīng)的算法輸出PWM信號,作為驅(qū)動電路的驅(qū)動信號,來改逆變器的輸出功率,以達到控制三相永磁式同步交流伺服電機的目的。
功率驅(qū)動單元首先通過三相全橋整流電路對輸入的三相電或者市電進行整流,得到相應(yīng)的直流電。經(jīng)過整流好的三相電或市電,再通過三相正弦PWM電壓型逆變器變頻來驅(qū)動三相永磁式同步交流伺服電機,簡單的說是AC-DC-AC的變流過程。
控制單元是整個交流伺服系統(tǒng)的核心,實現(xiàn)系統(tǒng)位置控制、速度控制、轉(zhuǎn)矩和電流控制。
伺服電機與步進電機的性能比較
控制精度:步進電機的相數(shù)和拍數(shù)越多,它的精確度就越高,伺服電機取塊于自帶的編碼器,編碼器的刻度越多,精度就越高;
低頻特性:步進電機在低速時易出現(xiàn)低頻振動現(xiàn)象,當它工作在低速時一般采用阻尼技術(shù)或細分技術(shù)來克服低頻振動現(xiàn)象,伺服電機運轉(zhuǎn)非常平穩(wěn),即使在低速時也不會出現(xiàn)振動現(xiàn)象;
矩頻特性:步進電機輸出力矩隨轉(zhuǎn)速的升高而下降,高速時會急劇下降,伺服電機在額定轉(zhuǎn)速內(nèi)為恒力矩輸出,在額定轉(zhuǎn)速上為恒功率輸出;
過載能力:步進電機不具備過載能力,伺服電機有較強的過載能力;
運行性能:步進電機的控制為開環(huán)控制,啟動頻率過高或負載過大易丟步或堵轉(zhuǎn)的現(xiàn)象,停止時轉(zhuǎn)速過高易出現(xiàn)過沖現(xiàn)象,交流伺服驅(qū)動系統(tǒng)為閉環(huán)控制,驅(qū)動器可直接對電機編碼器反饋信號進行采樣,內(nèi)部構(gòu)成位置環(huán)和速度環(huán),一般不會出現(xiàn)步進電機的丟步或過沖的現(xiàn)象,控制性能更為可靠;
速度響應(yīng)性能:步進電機從靜止加速到工作轉(zhuǎn)速需要上百毫秒,而交流伺服系統(tǒng)的加速性能較好,一般只需幾毫秒,可用于要求快速啟停的控制場合。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底