
比較上述驅動電路的
基本性能可概括如下。
1)單極性驅動電路:這里指單電源、單極性驅動電路,每相只用一只功率管。線路簡單、成本低,但效率也低,啟動和運行頻率均不高。現常用來驅動小功率步進電機。
2)雙極性驅動電路:線路復雜,效率高。常用來驅動永磁式電機、混合式電機或大功率電機。
3)高低壓驅動電路:線路較簡單。雙電源,每相需要兩只功率管。效率較高,啟動和運行頻率比單極性電路高。
4)斬波驅動電路:雙電源成高壓單電源。運行特性好,效率高,但線路復雜。
5)調頻調壓驅動電路:控制電路較復雜。因為V隨f改變,所以,效率、運行特性等都有了明顯改善。
6)細分驅動電路:線路復雜。運行特性好。微機的應用已使它成為很有發展前途的驅動方式之一。
2、驅動電路實例
1) 圖1是斬波驅動的一個應用實例。被驅動的電機是36By3-30型三相步進電機。它的A、B、C三相分別接在圖示電路的A、B、C端。A、B、C三端的輸入分別接電路的D03、D02、DO1。
該電路有兩種工作狀態:(1)步進方式;(2)維持方式。處在步進工作方式時,流過取樣電阻R0和相繞組上的電流為2A;處在維持方式時,僅為0.5A。工作方式的轉換受程序控制。該程序送“1”給DO5時,則為步進方式。送“0”時,為維持方式。
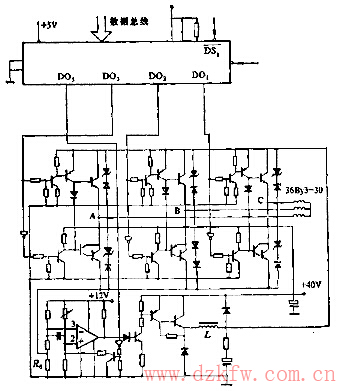
實際上,是用DO5電位的高低改變比較器比較基準端“2”的電位。DO5電位高,“2”端電位抬高,則比較器“3”端的翻轉電位也隨之提高。即取樣
電阻R0上的電壓隨之提高,流過R0的平均電流相應增大。反之,‘2”端電位降低,流過R0的平均電流相應減小。
斬波驅動由比較器、比較器后面的放大電路、L、C、R等電路形成。假設比較器的“3”端電位高于“2”端,它的輸出為低電位。由三極管組成的放大電路截止,加到相繞組上的電壓逐步衰減,流過R0上的電流和iR0也隨之降低。經過一定時間后,“3”端電位低于“2”端。經比較器比較后,輸出高電位。(http://www.diangon.com/版權所有)放大電路的輸出電壓升高。流過取樣電阻R0上的電流以回路時間常數所決定的規律逐步上升,R0上的壓降iR0也隨之上升。當“3” 端電位再一次高于“2”端時,比較器的輸出再次變低。如此循環,形成斬波輸出。
驅動電路的另外3個輸入端DO1、D02、D03受程序控制,用來決定步進電機的正反向旋轉。正轉時,以ABC→ABC→ABC→ABC→ABC→ABC→ABC→…方式工作;反轉時,以ABC→ABC→ABC→ABC→ABC→ABC→ABC→…方式工作。
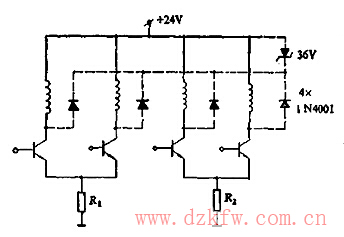
2)圖2是噴墨打字機中使用的驅動電路。被驅動的是四相步進電機,步距角為3.6°。驅動電路由四只二極管、四只晶體管、兩組雙線繞組、兩只限流電阻和一只36V穩壓管組成。穩壓管以圖示方式與二極管串聯后,并聯在線圈兩端。這種方式與單純并二極甘或并二極管-電阻相比,能在晶體管截止之后,使回路電流衰減得更迅速。除此之外,截止后,加在集電極上的最高電壓是電源電壓加穩壓管的穩定電壓,而與電流無關。在圖示電路中,為60V。這使得決定最
大集電極電壓的額定值變得很容易。圖中的串聯電阻主要是為了迅速建立激磁電流和改善轉矩特性而設。設繞組電阻為Rw,串聯電阻為R;則串聯R后,電路的時間常數將從L/Rw減少為L/(Rw+R)。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底