
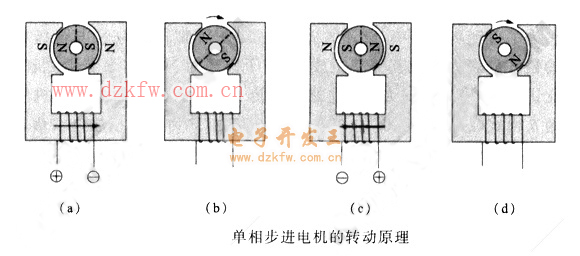
單相PM型步進(jìn)電機(jī)
根據(jù)步進(jìn)電機(jī)相數(shù)分類的單相步進(jìn)電機(jī)如下圖所示。有關(guān)內(nèi)容在前節(jié)已經(jīng)說明,此處不再贅述。
兩相PM型步進(jìn)電機(jī)
如下圖所示的兩相步進(jìn)電機(jī)為例,定子繞組在圓周上分布排列,最簡單的轉(zhuǎn)子極數(shù)為2,即極對數(shù)Nr=1。
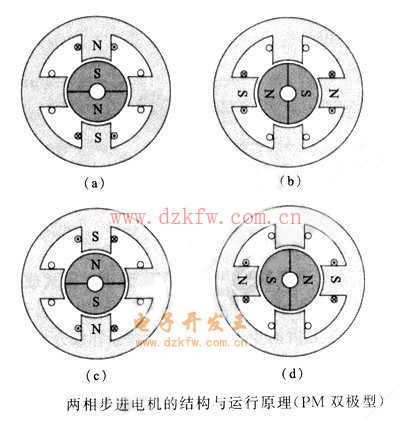
根據(jù)式θs=180°/PNr,令P=2,則機(jī)械角θs=90°/Nr,此90°為電氣角表示的步距角,電氣角除以Nr即為機(jī)械角。轉(zhuǎn)子極數(shù)為2,即Nr=1,則電氣步距角與機(jī)械步距角相等,為90°(θs=90°/PNr)。
兩相PM型電機(jī)定子內(nèi)圓有四個(gè)磁極,每個(gè)磁極上繞了一個(gè)線圈,每兩個(gè)相差180°的磁極線圈組成一相繞組,PM型步進(jìn)電機(jī)的單極和雙極工作方式在上文“兩相步進(jìn)電機(jī)”中均已說明。
下面以單極工作方式為例說明步進(jìn)電機(jī)的旋轉(zhuǎn)原理,如下圖所示,可知轉(zhuǎn)子步距角為90°,4步旋轉(zhuǎn)一周(360°)。
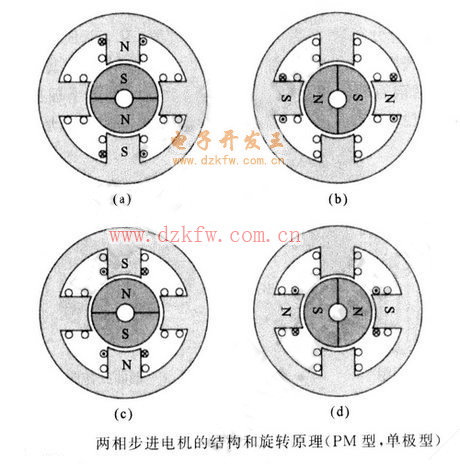
圖中在一個(gè)磁極上繞了兩個(gè)線圈,每個(gè)線圈的激磁電流只流一個(gè)方向的電流,故圖(a)中A相線圈為下層線圈,“杠A”為上層線圈。步進(jìn)1狀態(tài),給1相下層線圈A相通電,在上磁極產(chǎn)生N極,下磁極產(chǎn)生S 極,利用定轉(zhuǎn)子磁極異性相吸,直至平衡位置。
然后1相電流斷開,2相線圈B相接通電流,定子磁極左邊為S極,右邊為N極,吸引轉(zhuǎn)子順時(shí)針旋轉(zhuǎn)90°,轉(zhuǎn)到步進(jìn)2狀態(tài),如圖(b)所示。再次電流切換到1相線圈“杠A”相,1相磁極反轉(zhuǎn),轉(zhuǎn)子順方向(順時(shí)針方向)旋轉(zhuǎn)。如磁極上為單線圈,則線圈需要流過正反向電流(此為雙向驅(qū)動(dòng),Bipolar)。
圖中1相有兩個(gè)線圈,電流單向流過,兩個(gè)線圈產(chǎn)生的極性相反,給“杠A”線圈通電,磁極極性反轉(zhuǎn)成為圖中(c)所示狀態(tài)。同樣原理,2相線圈依靠電流的方向的變化,使其磁極極性從第2步變成第4步的極性,使轉(zhuǎn)子旋轉(zhuǎn)到圖(d)狀態(tài),此時(shí),轉(zhuǎn)子由第3步順時(shí)針轉(zhuǎn)過90°到第4步。不斷重復(fù)進(jìn)行第1步至第4步,轉(zhuǎn)子就連續(xù)旋轉(zhuǎn)。如要逆時(shí)針旋轉(zhuǎn),只要使第2步與第4步的定子極性相反即可。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底