
當步進電機切換一次定子繞組的激磁電流時,轉子就旋轉一個固定角度即步距角。步距角一般由切換的相電流產生的旋轉力矩得到,所以需要每相極數是偶數。步進電機通常都為兩相以上的,當然也有一些特殊的只有一個線圈的單相步進電機。雖說單相,實為一個線圈產生的磁通方向交互反轉而驅動轉子轉動。實用的步進電機的相數有單相、兩相、三相、四相、五相。
現在使用的步進電機大部分用永磁轉子。普遍使用永久磁鐵的原因是效率高,分辨率高等優點。以下以介紹永磁轉子為主。
決定步距角的因素
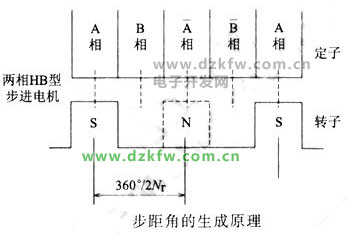
步進電機分辨率(一圈的步數,360°除以步距角)越高,位置精度越高。為了得到高分辨率,設計的極數要多。PM型轉子為N與S極在轉子的鐵心外表面上交互等節距放置,轉子極數為N極與S極數之和,為簡化講解,假設極對數為1。此處確定轉子為永久磁鐵的步進電機的步距角θs由下式表示,其中Nr為轉子極對數,P為定子相數,(本課后面敘述的HB型步進電機Nr為轉子齒數):
θs=180°/PNr
上式的物理含義如下:
轉子旋轉一周的機械角度為360。,如用極數2Nr去除,相當于一個極所占的機械角度即180°/Nr。這就是說,一個極的機械角度用定子相數去分割就得到步距角,此概念如下圖所示。
由式θs=180°/PNr可知,步距角越小,分辨率越高,因此要提高步進電機的分辨率,就要增加轉子極對數或采用定子相數P較多的多相式方法。而Nr的增加受到機械加工的限制,所以要制造高分辨率的步進電機需要兩種方法并用才行。
單相步進電機
單相步進電機是在一個線圈骨架上纏繞環形線圈,給它通以正負交變的電流,每切換一次電流就按固定方向走一步。由于轉子磁路所通過的磁導(磁阻的倒數,表示磁通流過的容易程度)變大為其轉動方向,故單相步進電機只能按一個方向運動。為使轉動方向確定,磁導采取了多種措施,例如使定子磁極寬于轉子,定子與轉子之間的工作氣隙不均勻,轉動方向為磁阻小的方向。下圖為單相步進電機的轉動原理。
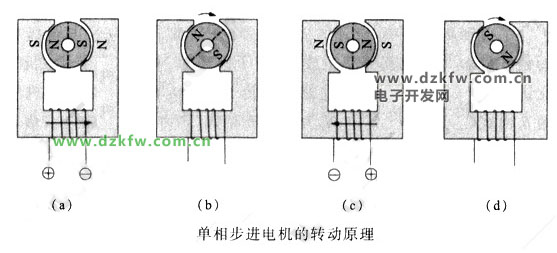
圖(a)定子繞組通正電流,定子磁極產生N和S極,轉子的N和S極被定子磁極吸引,停在圖示位置。當定子電流由正變負時,在切換過程中,電流接近于零,定子對轉子的吸引力接近零,此時轉子磁通產生的轉矩為主,如圖(b)所示,轉子的磁通要走氣隙最小的路徑,故轉子在磁通力矩的作用下,沿箭頭方向運動到轉子磁極軸線(N和S極的中心線)正對氣隙最小處停止。當定子繞組為負電流時,如圖(c)所示,定子磁極的極性反轉,轉子磁極受到定子N和S極的斥力和引力作用,沿箭頭方向運動,直到定轉子磁極軸線重合時轉子停止運動。加在繞組上的電流再次變換方向由負變正時,電流過零變正,則轉子經過圖(d)向圖(a)移動,步距角為180°。上述動作反復進行,電機轉子就能繼續轉動。
從以上單相步進電機的運行原理看出,單相步進電機的電磁轉矩只在定子電流變換時產生,故其平均轉矩比兩相以上的電機要小得多,響應脈沖頻率也在100pps以下,故其用途受到很大限制,只能在響應脈沖頻率比較低的輕載下運行。例如時鐘、車用計時器(發動機計時器)、水表計數器等。
下圖為另一種單相步進電機結構的照片,最左邊為電機整機,其次為電機線圈,再次為定子鐵心,最后是永磁轉子。

此種單相步進電機原理如上圖中所示,氣隙磁導發生變化,與只是磁導變化的結構不同,旋轉方向依然是由不對稱的定子磁極決定的。此定子為一個中間開直角三角形孔的磁極板,其斜線部分的磁導最大。轉子磁極正對斜面時磁導最大,其為轉子轉動方向,其運行原理與上面的原理圖是相同。
轉子為圓柱形永磁磁極,極數為4極,將Nr=2,P=1帶入式θs=180°/PNr,故步距角為θs=90°。
定子為一個圓形線圈,用正/負電流驅動。定子磁極通過氣隙與轉子產生相同的極數(4極)。其結構簡單,一個有三角形孔的磁極,可近似看成4極。此電機用于水表的流量計等。
下圖是另外一種單相步進電機的外觀照片。此單相步進電機由照片看出,定子磁極的前端朝同一方向傾斜,從而改變轉子磁路的磁導,使轉子能沿一個方向旋轉,其功能與上圖(單相步進電機外觀與結構)的定子相同。

此種單相步進電機轉子為永磁磁極,其圓周上有N和S極共30個,定子為單相,總磁極數為30,用氣隙作轉子導向。繞于一個線圈架上的環形線圈經過正負電流,由式θs=180°/PNr得步距角θs=12°(Nr=15,P=1),并按一個方向運動。其響應速度因為單相繞組的關系,只有幾十pps。此種電機實際用于建筑機械的時針等。
以上所述的單相步進電機的旋轉方向由磁導的偏差大小決定。其他還有將定子磁極分極、嵌入銅質的短路線圈等,在本學習課程中就不再詳述了。
兩相步進電機
兩相步進電機最簡單的構成為Nr=1的情況,電機結構如下圖所示。一般兩相電機定子磁極數為4的倍數,至少是4。轉子為N極與S 極各一個的兩極轉子。
定子一般用硅鋼片疊壓制作,定子磁極數為4極,相當于一相繞組占兩個極,A相兩個極在空間相差180°,B相兩個極在空間也相差180°。電流在一相繞組內正負流動(此種驅動方式稱為雙極性驅動),A相與B相電流的相位相差90°,兩相繞組中矩形波電流交替流過。
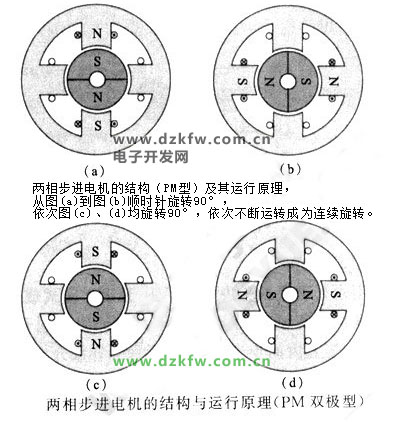
即兩相電機的定子,在Nr=1時,空間相差90°,時間上電流相差90°相位差,電流與普通的同步電機相似,在定子上產生旋轉磁場,轉子被旋轉磁場吸引,隨旋轉磁場同步旋轉。
上圖表示兩相步進電機的結構(PM型)及其運行原理,從圖(a)到圖(b)順時針旋轉90°,依次圖(c)、(d)均旋轉90°,依次不斷運轉成為連續旋轉。
以上圖為例,假如A相有兩個線圈,單向電流交替流過兩個線圈,也可產生相反的磁通方向,此方式稱為單極(uni-plar)型線圈。
如下圖所示線圈內部只流過單方向電流,此線圈稱為單極型線圈;另一種,線圈內流過正、反方向電流的線圈稱為雙極型線圈,兩種線圈的優缺點將在后面的課程中詳細介紹。單極型線圈可以取代上圖所示雙極型線圈,運行時具有相同的步距角。
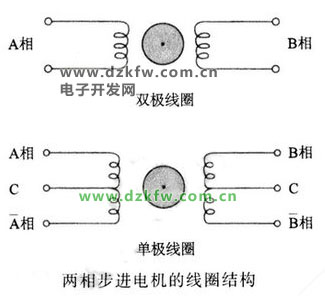
上圖中的兩相單極型線圈在有些文獻中也被稱為四相步進電機,此時其轉子極對數、齒數Nr,以及步距角θs均與雙極型線圈相同。本課程兩相電機的定義符合式θs=180°/PNr,即將轉子齒數和步距角θs代入式θs=180°/PNr,如P=2,則為兩相電機,如Nr相同,P=4,步距角θs只有1/2,則電機為四相電機,在此特別提請注意。
兩相步進電機現在應用廣泛,實際電機的構造比圖(PM雙極型兩相步進電機結構與運行原理)復雜,定子除采用疊片外,還有爪極結構,但基本原理可參考圖(PM雙極型兩相步進電機結構與運行原理),圖中所示的轉子被稱為PM型(永久磁鐵或永磁式)轉子,磁性圓柱的外表面形成轉子磁極。
三相步進電機
轉子不采用永久磁鐵的步進電機(VR型或反應式或變磁阻式)很早就在三相步進電機上得到應用。1986年日本伺服公司開發了轉子為永久磁鐵、定子磁極帶有齒的步進電機(在后面會詳細介紹磁極齒的設計原理),定、轉子齒距的配合,可以得到更高的角分辨率和轉矩。三相步進電機定子線圈的主極數為三的倍數,故三相步進電機的定子主極數為3、6、9、12 等。
轉子不采用永久磁鐵的步進電機(VR型或反應式或變磁阻式)很早就在三相步進電機上得到應用。1986年日本伺服公司開發了轉子為永久磁鐵、定子磁極帶有齒的步進電機(在后面會詳細介紹磁極齒的設計原理),定、轉子齒距的配合,可以得到更高的角分辨率和轉矩。三相步進電機定子線圈的主極數為三的倍數,故三相步進電機的定子主極數為3、6、9、12 等。
下圖為不同相數的步進電機典型定子結構和驅動電路的比較,其中忽略了轉子結構圖。假設轉子均為PM型或HB型,并且依據定子為兩相、三相、五相等配備相應的轉子。定子采用不產生不平衡電磁力(在后面會詳細介紹,轉子徑向吸引力的和不能完全互相抵消,產生剩余徑向力)的最小主極數結構,即兩相為4個主極、三相為3個主極、五相為5個主極時,結構上會產生不平衡電磁力,除特殊用途外不會使用上述結構。圖中,定子的結構為兩相為8個主極、三相為6個主極、五相為10個主極,為最簡單的結構。
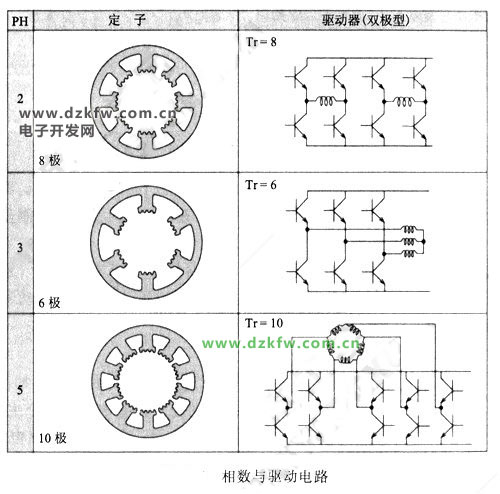
另一方面,如雙極型(Bi-polar)線圈所使用的步進電機驅動電路,其功率管數,兩相為8個、五相為10個,三相則由于繞組采用Y或△接法的關系,3個出線口的驅動只用6個功率管就夠了,所以從電機和驅動器一體考慮,三相步進電機結構最簡單,其兩者的制造成本最低。
從定子相數的奇偶數來看,奇數情況下驅動電路中切換功率管的數量要比偶數情況下少,例如三相步進電機要比兩相步進電機的驅動功率管數少。三相的驅動IC現在三權電氣公司、三洋電機公司、新電元工業公司等生產企業已經有售。三相步進電機與兩相步進電機比較,在相同的轉子齒數時,具有提高1.5倍分辨率、振動低等優點,所以使用數量會增加,價格會降低,希望其能成為一款系列化步進電機,其性能將在后面詳細介紹。
有關三相永磁式步進電機,除本課程外,以前還沒有系統介紹的文獻, 本課程將詳細介紹三相HB型步進電機(42mm及60mm),其驅動器的外形如下圖所示。

四相步進電機
例如Nr=50,θs=0.9°的步進電機,按式θs=180°/PNr計算,則P=4,即為四相步進電機。這里需要注意的是上文兩相步進電機中圖所述的的兩相單極線圈雖然有四個線圈,但不是四相電機。
四相步進電機因其為偶數相,驅動電路的功率管要用16個,定子的主極個數也為16個,均為兩相步進電機的兩倍,所以造成其驅動器結構復雜,成本高,因此只有特殊用途才使用。
五相步進電機
現在市面上銷售的步進電機中,相數最多的電機為五相。如圖(相熟與驅動電路)所示,定子主極數為10個,同一相繞組分別繞在相差180°的2個主極上,同時通電產生磁場。各相繞組之間首尾相連,從五個接點引出電源線。 通常為5個繞組同時通電,形成一條支路是1個繞組,另一條支路為4個繞組串聯的并聯通電模式;順次切換1個繞組通電支路的相,就能使轉子一步步旋轉。所得步距角如下所述。
依據式θs=180°/PNr,Nr=50時,對兩相、三相、四相、五相電機而言,P=2、P=3、P=4、P=5代入式中,得到步距角為:兩相為1.8°,三相為1.2°,四相為0.9°,五相為0.72°。五相步進電機的分辨率是最高的,而且定位轉矩小。定子結構及其驅動電路比四相步進電機要簡單,但比兩相和三相步進電機要復雜,成本也高。
相數與特性
現以兩相與三相步進電機為例詳細說明步進電機的相數與特性的關系。相數與特性綜合概述為:
高分辨率
根據式θs=180°/PNr,步距角為180/PNr,故相數P越大,角分辨率越高。提高分辨率,可以提高定位控制精度,改善低速失步,使多相控制成為可能,并且可以改善阻尼(改善制動性能,減小停止時的超調量和制動時間)。詳細說明在驅動技術部分。
低振動
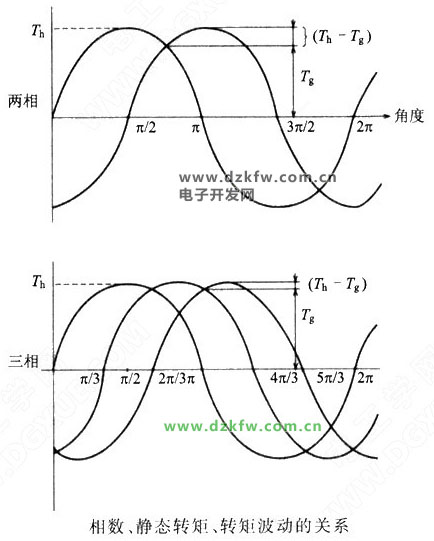
如下圖,表示的是兩相和三相步進電機的轉矩波動,相數愈多,換相的兩相繞組動態轉矩曲線的交點轉矩值Tg與最大靜態轉矩Th的相對誤差愈小。Tg為電機所帶負載轉矩的下限值,(Th— Tg)/Th為轉矩波動的相對誤差,相數越多,此值越小,對降低振動越有利。亦即,相數越多,電機產生的轉矩波動幅值越小,頻率越高,產生的振動越小(有關說明在后面章節)。
高轉速
多相步進電機的優點是能高速響應。步進電機為同步電機,繞組電流頻率與轉子速度成正比例,若電機高速運轉,則繞組電流角頻率ω增加,使繞組電感L產生的電抗ωL加大,從而降低電流,致使轉矩下降。
當用數千pps驅動步進電機時,電機繞組阻抗Z與直流電阻相比,電抗ωL將大幅增加。當電機高速運轉時,如電壓V一定,則電機相電流為V/ωL。機械角速度ωm為ω=Nrωm,則對相同機械角速度的電機,電流與Nr成反比。
根據式θs=180°/PNr,兩相Nr=50時,步距角為1.8°;五相Nr=20時,步距角為1.8°。當這兩種步進電機以相同的轉速高速旋轉時,五相繞組的電流是兩相的2.5倍,因為電流小則轉矩小,所以五相的轉矩比兩相的要大。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底