
步進(jìn)電機(jī)常用來(lái)做定位控制,它可以由PLC輸出的脈沖數(shù)量控制旋轉(zhuǎn)的角度(相對(duì)來(lái)說(shuō)可以是距離),脈沖的頻率控制步進(jìn)電機(jī)旋轉(zhuǎn)的速度。但用于控制精度不是很高的場(chǎng)合,簡(jiǎn)單、經(jīng)濟(jì)、控制方便;對(duì)于控制精度要求很高的場(chǎng)合,就得使用伺服控制系統(tǒng)了。
步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來(lái)驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門(mén)子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。

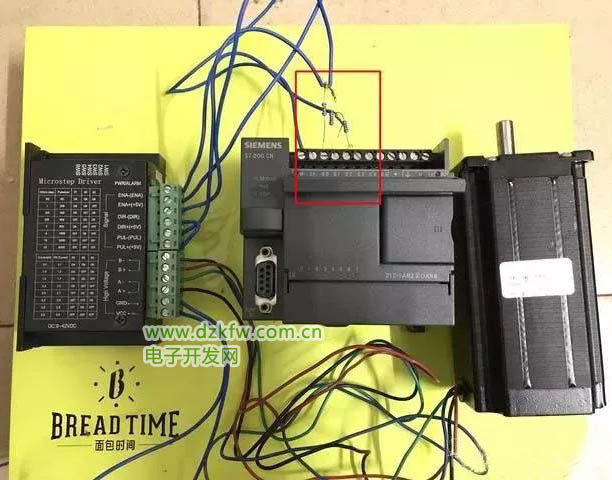
步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)+西門(mén)子PLC(CPU 222 CN)
相關(guān)的定義
1、驅(qū)動(dòng)器:用于PLC控制步進(jìn)電機(jī)的媒介,負(fù)責(zé)把PLC給的脈沖信號(hào)經(jīng)過(guò)放大后,輸給步進(jìn)電機(jī),使電機(jī)按照PLC和驅(qū)動(dòng)器給定的參數(shù)運(yùn)行。
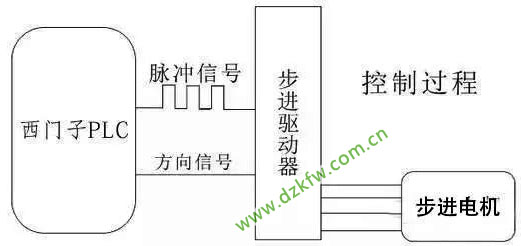
控制過(guò)程
2、步距角:每個(gè)脈沖使步進(jìn)電機(jī)旋轉(zhuǎn)的角度,比較普遍的是1.8°,這個(gè)一般是不可以改變的啦。
例:在未設(shè)定細(xì)分情況下,控制步距角為1.8°的步進(jìn)電機(jī)轉(zhuǎn)動(dòng)一圈(360°),需要PLC發(fā)出多少個(gè)脈沖?
360°/X=1.8°/1,所以X=200個(gè)脈沖。
3、細(xì)分:實(shí)際應(yīng)用中發(fā)現(xiàn),步距角很大的話(huà),每次轉(zhuǎn)動(dòng)的角度也就很大,會(huì)引起振動(dòng),相應(yīng)的控制誤差也會(huì)變大。所以引入了細(xì)分的功能。意思就是,通過(guò)驅(qū)動(dòng)器的DIP開(kāi)關(guān)把步距角多分幾分,讓電機(jī)轉(zhuǎn)動(dòng)更加平穩(wěn)。
例:步距角為1.8°,設(shè)定10細(xì)分,那么PLC每發(fā)出一個(gè)脈沖,電機(jī)只轉(zhuǎn)動(dòng)0.18°,步進(jìn)電機(jī)轉(zhuǎn)動(dòng)一圈(360°),需要PLC發(fā)出多少個(gè)脈沖?
360°/X=0.18°/1,所以X=2000個(gè)脈沖。
小結(jié):步距角越大,脈沖數(shù)越少;步距角越小,脈沖數(shù)越多。
步進(jìn)系統(tǒng)硬件介紹(以普菲德步進(jìn)電機(jī)為例)
1、步進(jìn)驅(qū)動(dòng)器
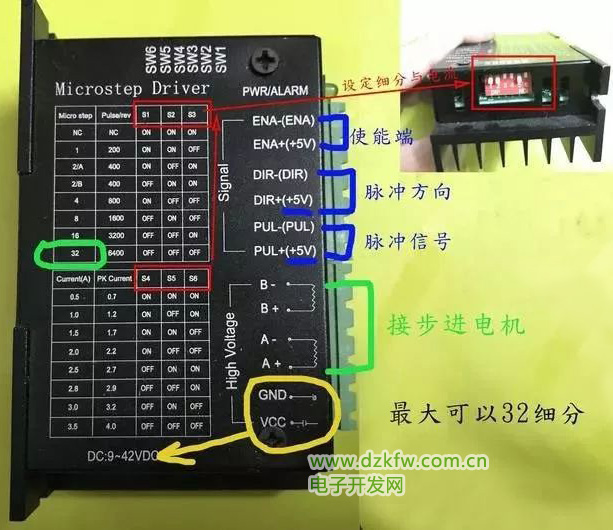
普菲德驅(qū)動(dòng)器說(shuō)明
步進(jìn)電機(jī)的方向控制一般有兩種:
A)脈沖+方向:PUL有脈沖產(chǎn)生時(shí),電機(jī)就會(huì)轉(zhuǎn)動(dòng),方向由DIR來(lái)決定。
B)正向脈沖+反向脈沖:當(dāng)PUL有脈沖產(chǎn)生時(shí),正轉(zhuǎn);當(dāng)DIR有脈沖產(chǎn)生時(shí),反正。但PUL與DIR不能同時(shí)有脈沖產(chǎn)生。
2、步進(jìn)電機(jī)

步進(jìn)電機(jī)參數(shù)
當(dāng)A.B 兩相繞組調(diào)換時(shí),可使電機(jī)反向。
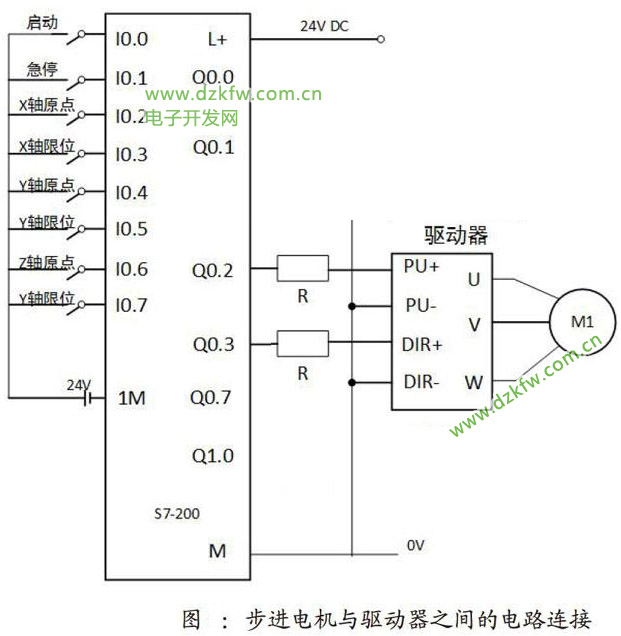
與PLC的接線(xiàn)圖
該步進(jìn)電機(jī)的信號(hào)電壓是5V,西門(mén)子PLC使用的電壓為24V,所以要接入驅(qū)動(dòng)器,需要串接1.2K,1/4W的電阻,如上圖紅色部分所示。
西門(mén)子PLC(CPU222)能輸出高速脈沖有兩種:
1、PTO(占空比50%)
2、PWM(占空比可更改)
利用以上兩種高速脈沖輸出指令可以控制步進(jìn)驅(qū)動(dòng)器,進(jìn)而控制步進(jìn)電機(jī),進(jìn)而控制一些具體設(shè)備的移動(dòng)與速度。
 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底