
≤√¥ «≤ΩþMÎäôC£ø
≤ΩþMÎäôC «å¢Îä√}õ_–≈Ãñ£¨ÞD(zhu®£n)◊É?y®≠u)ÈΩ«Œª“∆ªÚæÄŒª“∆µƒÈ_≠h(hu®¢n)øÿ÷∆ÎäôC£¨”÷∑QûÈ√}õ_ÎäôC°£‘⁄∑«≥¨ðdµƒ«Èõrœ¬£¨ÎäôCµƒÞD(zhu®£n)ÀŸ°¢Õ£÷πµƒŒª÷√÷ª»°õQ”⁄√}õ_–≈ÃñµƒÓl¬ ∫Õ√}õ_îµ(sh®¥)£¨∂¯≤ª Ðÿìðd◊ɪصƒ”∞Ìë°£Æî≤ΩþMÚå(q®±)Ñ”∆˜Ω” ’µΩ“ªÇÄ√}õ_–≈Ãñïr£¨À¸æÕø…“‘Úå(q®±)Ñ”≤ΩþMÎäôC∞¥‘O(sh®®)∂®µƒ∑ΩœÚÞD(zhu®£n)Ñ”“ªÇÄπÃ∂®µƒΩ«∂»£¨∑QûÈ°∞≤ΩæýΩ«°±°£
≤ΩþMÎäôCµƒ–˝ÞD(zhu®£n) «“‘πÃ∂®µƒΩ«∂»“ª≤Ω“ª≤Ωþ\––µƒ£¨ø…“‘Õ®þ^øÿ÷∆√}õ_ÇÄîµ(sh®¥)ÅÌøÿ÷∆Ω«Œª“∆¡ø£¨èƒ∂¯þ_µΩú ¥_∂®Œªµƒƒøµƒ£¨Õ¨ïrø…“‘Õ®þ^øÿ÷∆√}õ_Ól¬ £¨ÅÌøÿ÷∆ÎäôCÞD(zhu®£n)Ñ”µƒÀŸ∂»∫Õº”ÀŸ∂»£¨èƒ∂¯þ_µΩ’{(di®§o)ÀŸµƒƒøµƒ°£≤ΩþMÎäôC∂ý”√”⁄îµ(sh®¥)◊÷ Ω”ãÀ„ôCµƒÕ‚≤ø‘O(sh®®)lj£¨“‘º∞¥Ú”°ôC°¢¿LàDôC∫Õ¥≈±Pµ»—b°£
02
≤ΩþMÎäôCµƒÃÿ¸c
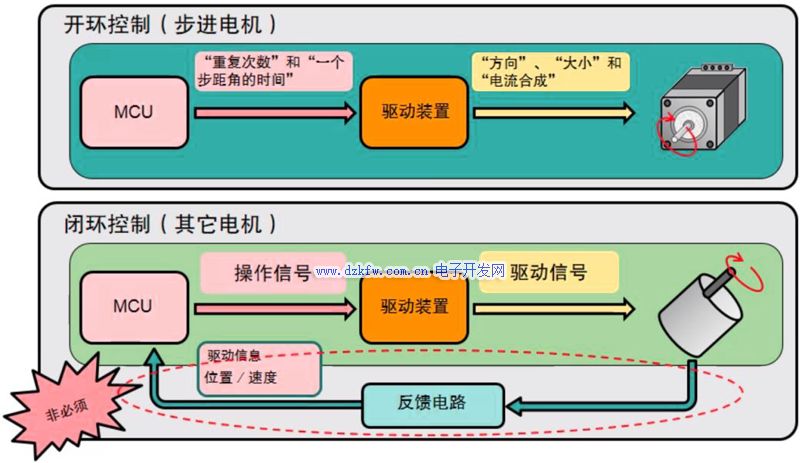
≤ΩþMÎäôCπ§◊˜ïrµƒŒª÷√∫ÕÀŸ∂»–≈Ãñ≤ª∑¥ÅΩoøÿ÷∆œµΩy(t®Øng)£¨»Áπ˚ÎäôCπ§◊˜ïrµƒŒª÷√∫ÕÀŸ∂»–≈Ãñ∑¥ÅΩoøÿ÷∆œµΩy(t®Øng)£¨ƒ«√¥À¸æÕ埔⁄À≈∑˛ÎäôC°£œý嶔⁄À≈∑˛ÎäôC£¨≤ΩþMÎäôCµƒøÿ÷∆œýå¶∫ÜÜŒ£¨µ´≤ªþm”√”⁄æ´∂»“™«Ûð^∏þµƒàˆ∫œ°£
≤ΩþMÎäôCµƒÉû(y®≠u)¸c∫Õ»±¸c∂º∑«≥£µƒÕª≥ˆ£¨Éû(y®≠u)¸cºØ÷–”⁄øÿ÷∆∫ÜÜŒ°¢æ´∂»∏þ£¨»±¸c «‘άﰢ’Ñ”∫Ֆ߬ £¨À¸õ]”–¿€∑e’`≤Ó£¨ΩY(ji®¶)òã(g®∞u)∫ÜÜŒ£¨ π”√æS–Þ∑Ω±„£¨÷∆‘Ï≥…±æµÕ°£≤ΩþMÎäôCéßÑ”ÿìðdëT¡øµƒƒÐ¡¶¥Û£¨þm”√”⁄÷––°–ÕôC¥≤∫ÕÀŸ∂»æ´∂»“™«Û≤ª∏þµƒµÿ∑Ω£¨»±¸c «–߬ ð^µÕ°¢∞l(f®°)ü·¥Û£¨”–ïrï˛°∞ ß≤Ω°±°£Éû(y®≠u)»±¸c»Áœ¬À˘ æ°£
Éû(y®≠u)¸c£∫
1. ÎäôC≤Ÿ◊˜“◊”⁄Õ®þ^√}õ_–≈Ãñðî»ÎµΩÎäôCþM––øÿ÷∆£ª
2. ≤ª–Ë“™∑¥ÅÎä¬∑“‘∑µªÿ–˝ÞD(zhu®£n)ðSµƒŒª÷√∫ÕÀŸ∂»–≈œ¢£®È_≠h(hu®¢n)øÿ÷∆£©£ª
3. ”…”⁄õ]”–Ω””|ÎäÀ¢∂¯åç¨F(xi®§n)¡À∏¸¥Ûµƒø…øø–‘°£
»±¸c£∫
1. –Ë“™√}õ_–≈Ãñðî≥ˆÎä¬∑£ª
2. Æîøÿ÷∆≤ªþmÆî?sh®¥)ƒïr∫Ú£¨ø…ƒÐï˛≥ˆ¨F(xi®§n)Õ¨≤ΩÅG ߣª
3. ”…”⁄‘⁄–˝ÞD(zhu®£n)ðSÕ£÷π∫Û»‘»ª¥Ê‘⁄Î䡘∂¯Æa(ch®£n)…˙ü·¡ø°£
03
≤ΩþMÎäôCµƒ∑÷Óê
‘⁄œýÕ¨Î䡘«“œýÕ¨ÞD(zhu®£n)æÿðî≥ˆµƒólº˛œ¬£¨ÜŒòO–Õ≤ΩþMÎäôC±»ÎpòO–Õ≤ΩþMÎäôC∂ý“ª±∂µƒæÄ»¶£¨≥…±æ∏¸∏þ£¨øÿ÷∆Îä¬∑µƒΩY(ji®¶)òã(g®∞u)“≤≤ª“ªò”£¨ƒø«∞ –àˆ…œ¡˜––µƒ¥Û∂ý «ÎpòO–Õ≤ΩþMÎäôC°£
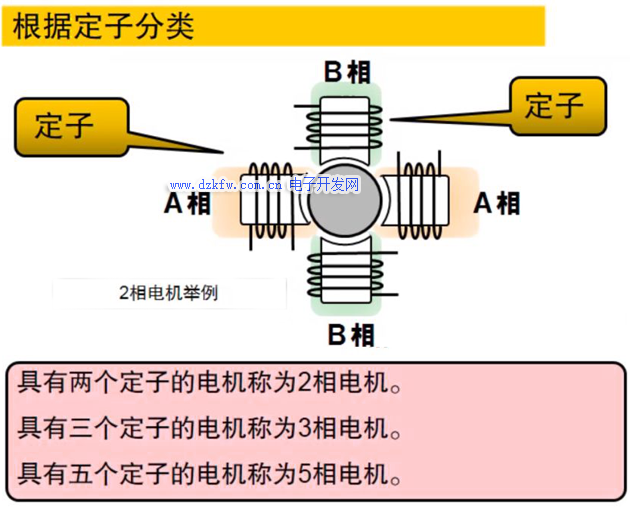
≤ΩþMÎäôC‘⁄òã(g®∞u)‘Ï…œÕ®≥£÷˜“™∞¥’’ÞD(zhu®£n)◊”Ãÿ¸c∫Õ∂®◊”¿@ΩMþM––∑÷Ó꣨œ¬√Ê墑îºöΩÈΩBþ@É…∑NÓê–Õµƒ∑÷Óê°£
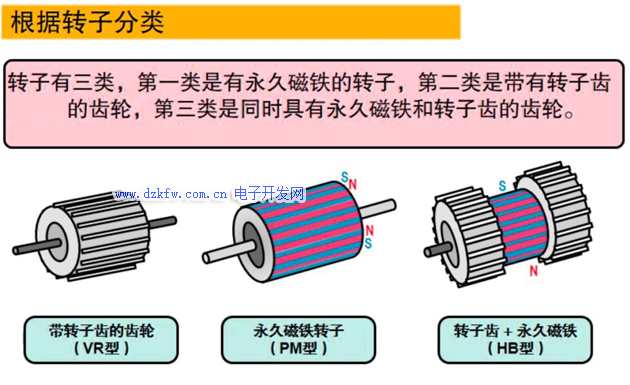
∞¥’’ÞD(zhu®£n)◊”∑÷Ó꣨”–»˝∑N÷˜“™Óê–Õ£∫∑¥ë™ Ω£®VR–Õ£©°¢”¿¥≈ Ω£®PM–Õ£©°¢ªÏ∫œ Ω£®HB–Õ£©°£
∑¥ë™ Ω
∂®◊”…œ”–¿@ΩM£¨¿@ΩM”…Ðõ¥≈≤ƒ¡œΩM≥…°£∆‰ΩY(ji®¶)òã(g®∞u)∫ÜÜŒ°¢≥…±æµÕ°¢≤ΩæýΩ«–°£¨ø…þ_1.2∂»£¨µ´Ñ”ëB(t®§i)–‘ƒÐ≤Ó£¨–߬ µÕ°¢∞l(f®°)ü·¥Û£¨ø…øø–‘Îy“‘±£◊C°£
”¿¥≈ Ω
”¿¥≈ Ω≤ΩþMÎäôCµƒÞD(zhu®£n)◊””√”¿¥≈≤ƒ¡œ÷∆≥…£¨ÞD(zhu®£n)◊”µƒòOîµ(sh®¥)≈c∂®◊”µƒòOîµ(sh®¥)œýÕ¨°£∆‰Ãÿ¸c «Ñ”ëB(t®§i)–‘ƒÐ∫√°¢ðî≥ˆ¡¶æÿ¥Û£¨µ´þ@∑NÎäôC∂»≤Ó£¨≤ΩæýΩ«¥Û£®“ª∞„ûÈ7.5∂»ªÚ15∂»£©°£
ªÏ∫œ Ω
ªÏ∫œ Ω≤ΩþMÎäôCæC∫œ¡À∑¥ë™ Ω∫Õ”¿¥≈ ΩµƒÉû(y®≠u)¸c£¨∆‰∂®◊”…œ”–∫Ð∂ýœý¿@ΩM£¨ÞD(zhu®£n)◊”…œ≤…”√”¿¥≈≤ƒ¡œ£¨ÞD(zhu®£n)◊”∫Õ∂®◊”æ˘”–∂ýÇÄ–°˝X“‘÷∏þ≤Ωæýæ´∂»°£∆‰Ãÿ¸c «ðî≥ˆ¡¶æÿ¥Û°¢Ñ”ëB(t®§i)–‘ƒÐ∫√°¢≤ΩæýΩ«–°£¨µ´ΩY(ji®¶)òã(g®∞u)èÕÎs°¢≥…±æœýå¶ð^∏þ°£
≤ΩþMÎäôC∞¥’’∂®◊”…œ¿@ΩMÅÌ∑÷Ó꣨π≤”–∂˛œý°¢»˝œý∫Ռœýµ»œµ¡–°£ƒø«∞◊Ó Ðög”≠µƒ «É…œýªÏ∫œ Ω≤ΩþMÎäôC£¨ºs’º97%“‘…œµƒ –àˆ∑ðÓ~£¨∆‰‘≠“Ú «–‘Ér±»∏þ£¨≈‰…œºö∑÷Úå(q®±)Ñ”∆˜∫Û–ßπ˚¡º∫√°£
‘ì∑NÎäôCµƒª˘±æ≤ΩæýΩ«ûÈ1.8∂»/≤Ω£¨≈‰…œ∞Î≤ΩÚå(q®±)Ñ”∆˜∫Û£¨≤ΩæýΩ«úp…ŸûÈ0.9∂»£¨≈‰…œºö∑÷Úå(q®±)Ñ”∆˜∫Û°£∆‰≤ΩæýΩ«ø…ºö∑÷þ_256±∂£®0.007∂»/Œ¢≤Ω£©°£”…”⁄ƒ¶Èþ¡¶∫Õ÷∆‘Ïæ´∂»µ»‘≠“Ú£¨åçÎHøÿ÷∆æ´∂»¬‘µÕ°£Õ¨“ª≤ΩþMÎäôCø…≈‰≤ªÕ¨ºö∑÷µƒÚå(q®±)Ñ”∆˜“‘∏ƒ◊Éæ´∂»µƒ–ßπ˚°£
04
≤ΩþMÎäôCµƒπ§◊˜‘≠¿Ì
≤ΩþMÎäôC «Õ®þ^√}õ_–≈ÃñÅÌþM––øÿ÷∆£¨√øðî»Î“ªÇÄ√}õ_–≈Ãñ£¨≤ΩþMÎäôC«∞þM“ª≤Ω°£≤ΩþMÎäôC–˝ÞD(zhu®£n)µƒ≤ΩæýΩ«£¨ «‘⁄ÎäôCΩY(ji®¶)òã(g®∞u)µƒª˘µA(ch®≥)…œµ»±»¿˝øÿ÷∆Æa(ch®£n)…˙µƒ£¨»Áπ˚øÿ÷∆Îä¬∑µƒºö∑÷øÿ÷∆≤ª◊É£¨ƒ«√¥≤ΩþM–˝ÞD(zhu®£n)µƒ≤ΩæýΩ«‘⁄¿Ì’ì…œ «“ªÇÄπÃ∂®µƒΩ«∂»°£‘⁄åçÎHπ§◊˜÷–£¨ÎäôC–˝ÞD(zhu®£n)µƒ≤ΩæýΩ«ï˛”–Œ¢–°µƒ≤ÓÑe£¨÷˜“™ «”…”⁄ÎäôCΩY(ji®¶)òã(g®∞u)…œµƒπÃ∂®”–’`≤ÓÆa(ch®£n)…˙µƒ£¨∂¯«“þ@∑N’`≤Ó≤ªï˛∑e¿€°£
≤ΩþMÎäôCµƒøÇòOîµ(sh®¥)‘Ω¥Û£¨º”π§æ´∂»µƒ“™«ÛæÕï˛‘Ω∏þ°£Õ®≥£π§òI(y®®)”√ªÏ∫œ–Õ≤ΩþMÎäôCµƒ≤ΩæýΩ« «1.8∂»£¨æÕ «200òO°£

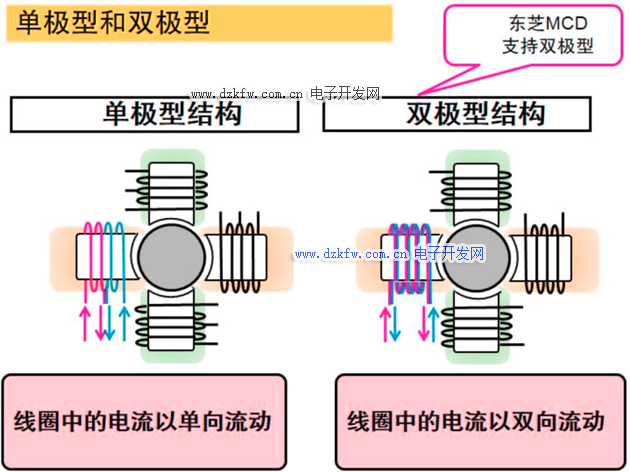
≤ΩþMÎäôCµƒœýÎ䡘º∞¥≈àˆ£¨◊Ò—≠∞≤≈ý”“ ÷¬ð–˝∂®¬…£¨”…ÎäƒÐÆa(ch®£n)…˙¥≈àˆƒÐ¡ø£¨øÿ÷∆ÎäôCœýÎ䡘£¨æՃРπÎäôC∂®◊”µƒ¥≈òO∑ΩœÚ∞l(f®°)…˙∑¥ÞD(zhu®£n)£¨∂˛œý¥≈àˆµƒ◊ɪ؜ý≈‰∫œ£¨þM∂¯Æa(ch®£n)…˙ÎäôCµƒ–˝ÞD(zhu®£n)°£
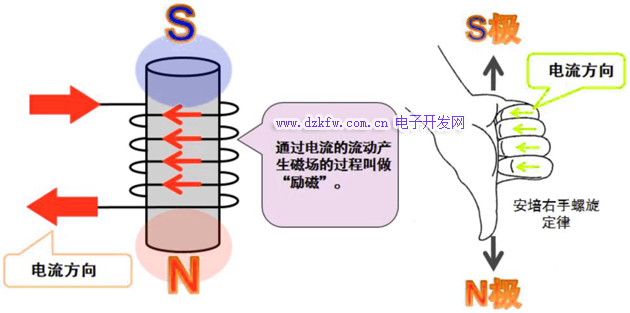
»Áπ˚Î䡘∑ΩœÚ∞l(f®°)…˙◊ɪأ¨¥≈òOµƒ∑ΩœÚ“≤ï˛∞l(f®°)…˙◊ɪأ¨≤ΩþMÎäôCµƒÎ䡘¡˜þ^∂®◊”Æa(ch®£n)…˙¥≈àˆµƒþ^≥ÃΩ–◊ˆÑÓ¥≈°£
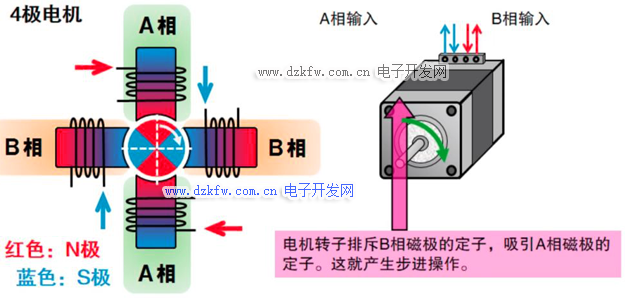
Õ®≥£À˘’fµƒ∂˛œý≤ΩþMÎäôC£¨ÎäôCÞD(zhu®£n)◊”µƒ–˝ÞD(zhu®£n)£¨∞¸∫¨≤ªÕ¨¥≈òOµƒ¥≈àˆœý≥‚∫ÕœýŒ¸åç¨F(xi®§n)µƒ°£»Á…œàDÀ˘ 棨AœýÆa(ch®£n)…˙NòO¥≈àˆŒ¸“˝ÞD(zhu®£n)◊”µƒSòO£¨BœýÆa(ch®£n)…˙SòO¥≈àˆŒ¸“˝ÞD(zhu®£n)◊”µƒNòO£¨ π∂®◊”Æa(ch®£n)…˙–˝ÞD(zhu®£n)µƒÑ”¡¶°£»Áπ˚∏ƒ◊ÉA°¢Bœý∂®◊”æÄ»¶µƒÎ䡘∑ΩœÚ£¨ÎäôCï˛Æa(ch®£n)…˙¡Ì“ª≤Ωµƒ–˝ÞD(zhu®£n)°£þB¿m(x®¥)∏ƒ◊ÉA°¢Bœý∂®◊”æÄ»¶µƒÎ䡘∑ΩœÚ£¨ÎäôCï˛Æa(ch®£n)…˙þB¿m(x®¥)µƒ–˝ÞD(zhu®£n)°£
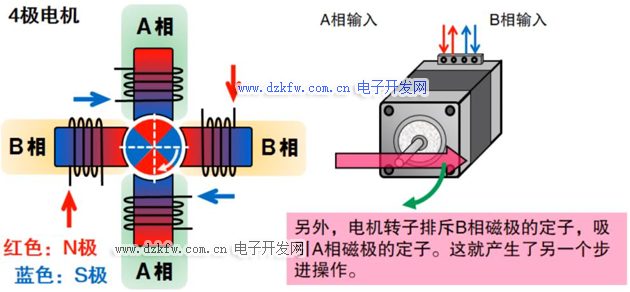
»Á…œàDÀ˘ 棨ÎäôCµƒþ\Ñ” «Õ®þ^∏ƒ◊ÉÎ䡘‘⁄ÎäôC÷–µƒ¡˜Ñ”ÅÌåç¨F(xi®§n)µƒ£¨Îä◊”ÞD(zhu®£n)◊”≈≈≥‚Bœý¥≈òOµƒ∂®◊”£¨Œ¸“˝Aœý¥≈òOµƒ∂®◊”£¨þ@æÕÆa(ch®£n)…˙¡À¡Ì“ªÇÄ≤ΩþM≤Ÿ◊˜°£
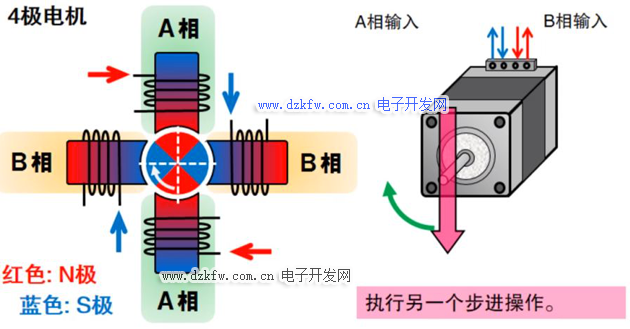
àÃ(zh®™)––¡Ì“ªÇÄ≤ΩþM≤Ÿ◊˜£¨ÎäôC∂®◊”¥≈òO∑¥ÞD(zhu®£n)£¨ÞD(zhu®£n)◊”≈≈≥‚Bœý¥≈òOµƒ∂®◊”£¨Œ¸“˝Aœý¥≈òOµƒ∂®◊”£¨»Á…œàDÀ˘ æ°£
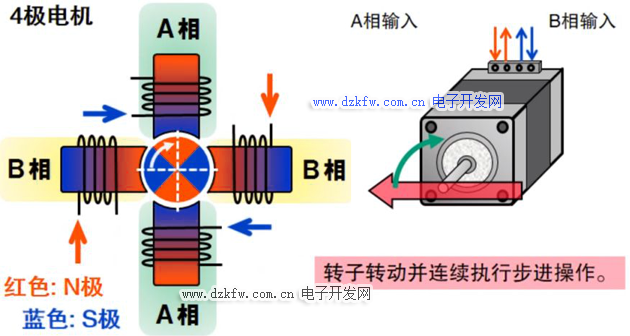
»Á…œàDÀ˘ 棨∂®◊”æÄ»¶÷–µƒÎ䡘∑ΩœÚüo’ì∫Œïr∞l(f®°)…˙◊ɪأ¨¥≈òOå¢ï˛∑¥ÞD(zhu®£n)£¨ÞD(zhu®£n)◊”÷ÿèÕ≤ΩþM≤Ÿ◊˜°£ñ|÷•≤ΩþMÎäôCÚå(q®±)Ñ”øÿ÷∆Îä¬∑å¶ÎäôCµƒ¥≈àˆÑÓ¥≈µƒøÿ÷∆£¨ «Õ®þ^√}åí’{(di®§o)÷∆∑Ω Ωåç¨F(xi®§n)µƒ£¨ƒÐâÚ?q®±)ç¨F(xi®§n)ÎäôC∏þ–ß°¢∑Ä(w®ßn)∂®µƒþ\––°£
05
≤ΩþMÎäôCµƒ≤Ÿ◊˜ƒ£ Ω
≤ΩþMÎäôCµƒª˘±æ≤Ÿ◊˜ƒ£ Ω∑QûÈ°∞ÑÓ¥≈ƒ£ Ω°±£¨ƒÐâÚ π≤ΩþMÎäôCπ§◊˜‘⁄»´≤Ωƒ£ Ω°¢∞Î≤Ωƒ£ Ω∫ÕŒ¢≤Ωƒ£ Ω£¨∆‰÷–Œ¢≤Ωƒ£ ΩƒÐâÚ”––ßµƒΩµµÕ≤ΩþMÎäôCœýÎ䡘µƒ‘άƒÐâÚ∏ƒ…∆≤ΩþMÎäôCπÔ–µƒ‘άï’Ñ”ÜñÓ}°£œ¬√Êå¢ΩÈΩB3∑NÑÓ¥≈ƒ£ Ω°£
»´≤Ωƒ£ Ω
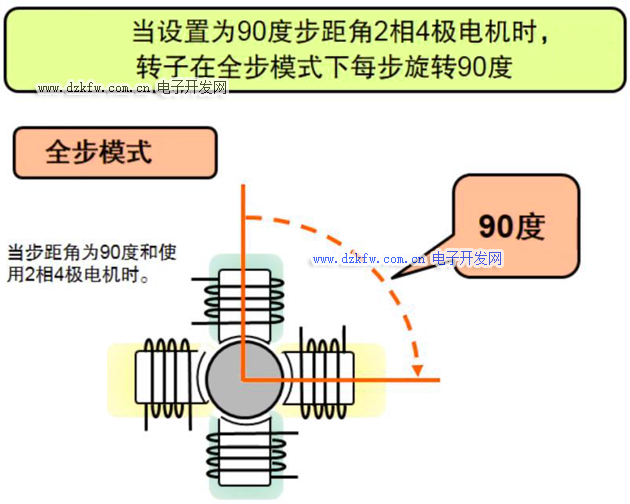
À˘÷^»´≤Ωƒ£ Ω£¨æÕ «“¿ì˛(j®¥)ÎäôCπÔ–ΩY(ji®¶)òã(g®∞u)‘O(sh®®)”ãπÃ∂®µƒ≤ΩæýΩ«π§◊˜£¨“ªÇÄÎä√}õ_£¨≤ΩþMÎäôC«∞þM“ªÇÄ≤ΩæýΩ«°£þ@ÇÄ≤ΩæýΩ« πÎäôC‘O(sh®®)”ãΩY(ji®¶)òã(g®∞u)À˘õQ∂®µƒ£¨“≤ø…“‘¿ÌΩ‚ûÈÎäôC“‘◊Ó¥Ûµƒ≤ΩæýΩ«–˝ÞD(zhu®£n)°£
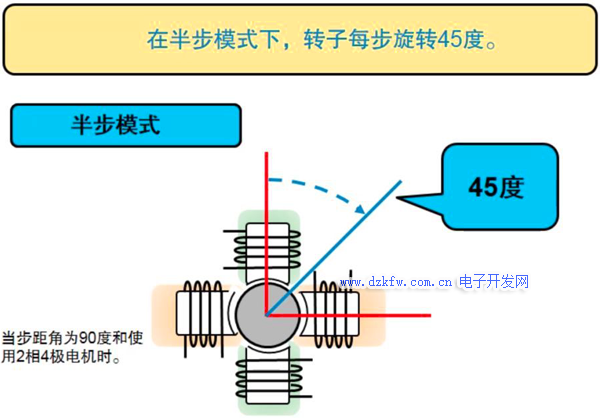
∞Î≤Ωƒ£ Ω
∞Î≤Ωƒ£ Ω «“‘ÎäôCπÔ–µƒΩY(ji®¶)òã(g®∞u)õQ∂®µƒ≤ΩæýΩ«µƒ“ª∞ÎΩ«∂»þM––≤ΩþM–˝ÞD(zhu®£n)°£»Áœ¬àDÀ˘ 棨≤ΩþMÎäôCµƒøÇòOîµ(sh®¥) «4ºâ£¨å¶ë™µƒ≤ΩæýΩ« «90∂»£¨ƒ«√¥∞Î≤Ωƒ£ Ωœ¬£¨≤ΩþMÎäôC√øÇÄ√}õ_–˝ÞD(zhu®£n)45∂»°£
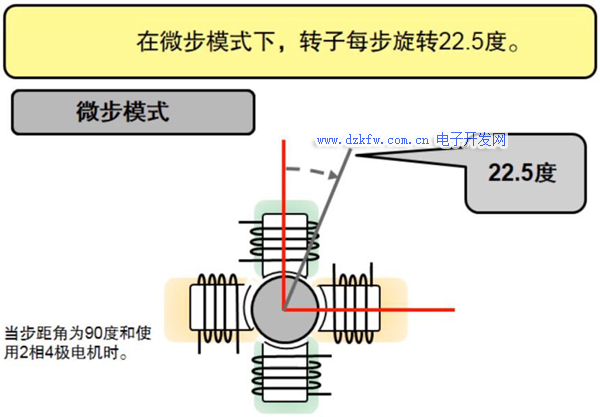
Œ¢≤Ωƒ£ Ω
Œ¢≤Ωƒ£ ΩÓêÀ∆”⁄∞Î≤Ωƒ£ Ω£¨≤ΩæýΩ«∏¸–°£¨æÕ «1/4≤Ω°¢1/8≤Ω°¢1/16≤Ω£¨ø…“‘µΩ∫Ð∏þµƒºö∑÷°£å¶ë™µƒ≤ΩþMΩ«∂»æÕ «‘⁄’˚≤Ω≤ΩæýΩ«≥À“‘Œ¢≤Ωœµîµ(sh®¥)°£
≤ΩþMÎäôCµƒ≤ΩæýΩ«‘Ω–°£¨–Ë“™µƒº”π§æ´∂»ï˛‘Ω∏þ£¨å¶ë™µƒŒ¢≤Ωïrµƒ≤ΩþMΩ«∂»µƒ’`≤Óï˛‘Ω¥Û°£
06
ÎäôCøÿ÷∆Úå(q®±)Ñ”∆˜
≤ΩþMÎäôC≤ªƒÐ÷±Ω”Ω”µΩπ§ÓlΩª¡˜ªÚ÷±¡˜Îä‘¥…œπ§◊˜£¨∂¯±ÿÌö π”√壔√µƒ≤ΩþMÎäôCÚå(q®±)Ñ”∆˜£¨À¸”–√}õ_∞l(f®°)…˙øÿ÷∆ÜŒ‘™°¢π¶¬ Úå(q®±)є܌‘™°¢±£◊oÜŒ‘™µ»ΩM≥…°£»Áœ¬àDÀ˘ æ°£
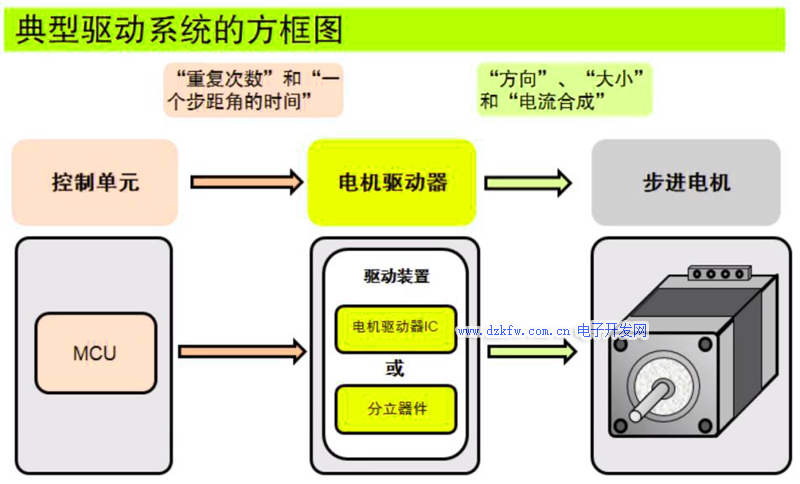
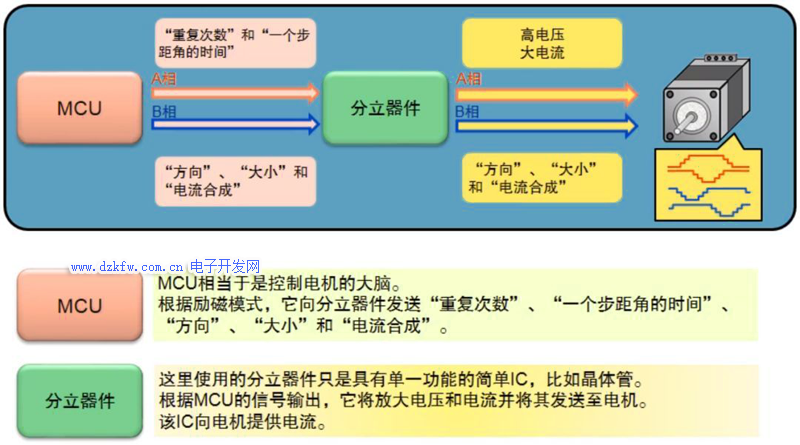
Úå(q®±)є܌‘™≈c≤ΩþMÎäôC÷±Ω”ÒÓ∫œ£¨“≤ø…“‘¿ÌΩ‚≥…≤ΩþMÎäôCŒ¢ôCøÿ÷∆∆˜µƒπ¶¬ Ω”ø⁄°£œ¬√Êå¢ π”√MCU∫Õ∑÷Îx‘™∆˜º˛µƒœµΩy(t®Øng)≈e¿˝’f√˜°£MCUœýÆî”⁄ «øÿ÷∆ÎäôCµƒ¥ÛƒX£¨À¸œÚ∑÷¡¢∆˜º˛∞l(f®°)ÀÕÎäôCµƒ≤ΩæýΩ«ïrÈg°¢ÞD(zhu®£n)Ñ”∑ΩœÚ∫Õ÷ÿèÕ¥Œîµ(sh®¥)µ»£¨∂¯∑÷¡¢∆˜º˛∏˘ì˛(j®¥)MCU∞l(f®°)≥ˆµƒ–≈Ãñ£¨å¢∑≈¥ÛÎäâ∫∫ÕÎ䡘≤¢å¢∆‰∞l(f®°)ÀÕ÷¡ÎäôC£¨èƒ∂¯Úå(q®±)Ñ”ÎäôCÞD(zhu®£n)Ñ”°£
»Á…œàDÀ˘ 棨‘융Ωy(t®Øng) π”√¡ÀMCU∫ÕÎäôCøÿ÷∆Úå(q®±)Ñ”∆˜IC°£èƒðî»Îøÿ÷∆–≈ÃñÅÌÖ^(q®±)∑÷£¨≤ΩþMÎäôCøÿ÷∆∆˜ICø…“‘∑÷ûÈœý»Î¡¶–Õ∫ÕïrÁä»Î¡¶–Õ°£œý»Î¡¶–Õ «÷∏ÎäôCµƒ√øÇÄÑÓ¥≈œýµƒÎ䡘∑ΩœÚ”…ðî»Î–≈Ãñøÿ÷∆£¨∂¯ïrÁä»Î¡¶–Õ «÷∏ÎäôCµƒÚå(q®±)Ñ””…√}õ_–≈ÃñÅÌøÿ÷∆°£
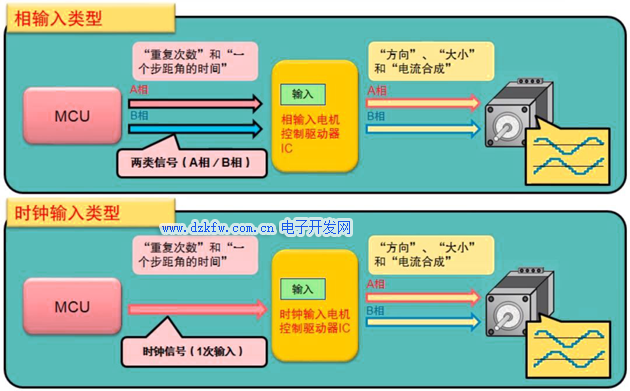
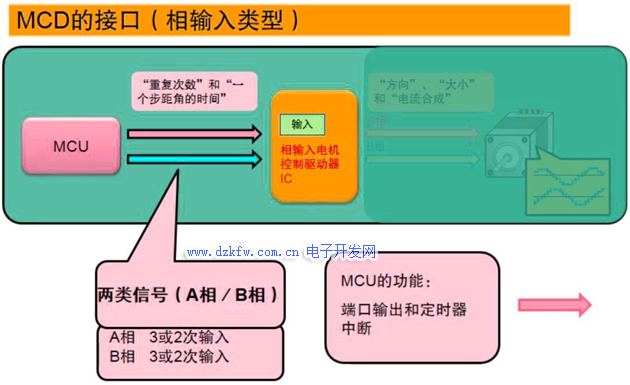
œý»Î¡¶–Õ
œý»Î¡¶–ÕÎäôCÚå(q®±)Ñ”∆˜–Ë“™A∫ÕBÉ…œýµƒøÿ÷∆–≈Ãñ£¨÷ª–Ë“™ïrÁä–≈Ãñ£¨–Ë“™øÿ÷∆–≈ÃñµƒMCU◊ˆ∏¸∂ýµƒþ\ðîπ§◊˜°£
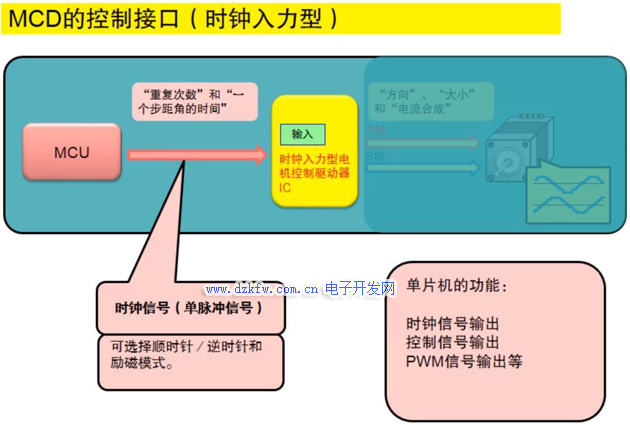
ïrÁä»Î¡¶–Õ
ïrÁä»Î¡¶–ÕÎäôCÚå(q®±)Ñ”∆˜µƒøÿ÷∆Ω”ø⁄£¨–Ë“™ïrÁä–≈Ãñ£®ÜŒ√}õ_–≈Ãñ£©ðî»Î£¨∆‰øÿ÷∆–≈Ãñœýå¶∫ÜÜŒ£¨MCUµƒŸY‘¥’º”√ð^…Ÿ°£
07
ÎäôCÚå(q®±)Ñ”∞≤»´ºº–g(sh®¥)
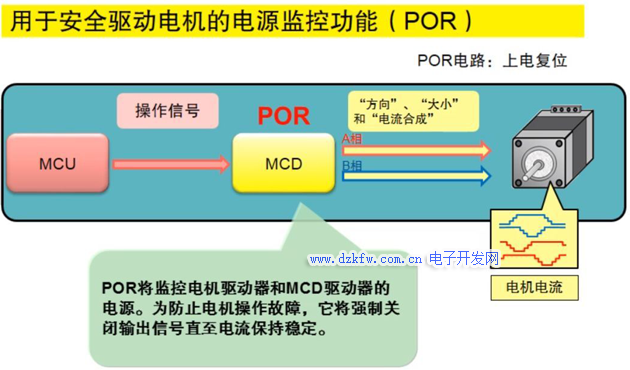
…œÎäèÕŒªπ¶ƒÐ£®POR£©
…œÎäèÕŒªπ¶ƒÐ墱O(ji®°n)øÿÎäôCÚå(q®±)Ñ”∆˜£¨“‘º∞ÎäôCÚå(q®±)Ñ”øÿ÷∆∆˜µƒÎä‘¥°£ûÈ∑¿÷πÎäôC≤Ÿ◊˜π ’œ£¨À¸å¢èä÷∆ÍP(gu®°n)È]ðî≥ˆ–≈Ãñ÷±÷¡π©ÎäÎäâ∫±£≥÷∑Ä(w®ßn)∂®°£»Áœ¬àDÀ˘ æ°£
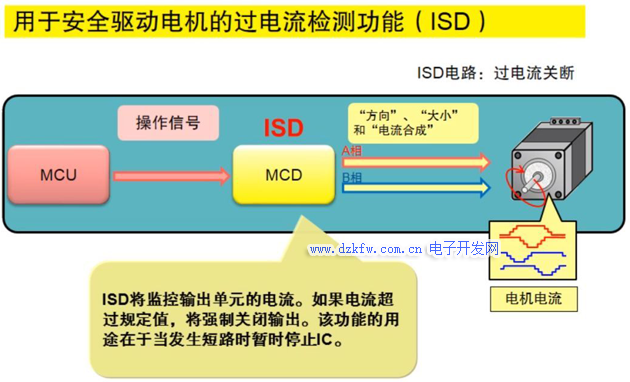
þ^Î䡘ôzúyπ¶ƒÐ£®ISD£©
þ^Î䡘ÍP(gu®°n)îýπ¶ƒÐ墱O(ji®°n)øÿðî≥ˆÜŒ‘™µƒÎ䡘£¨»Áπ˚Î䡘≥¨þ^“é(gu®©)∂®÷µ£¨å¢èä÷∆ÍP(gu®°n)È]ðî≥ˆ£¨‘ìπ¶ƒÐµƒ”√Õæ‘⁄”⁄Æî∞l(f®°)…˙∂ì∑ïrï∫ïrÕ£÷πICðî≥ˆ°£»Áœ¬àDÀ˘ æ°£
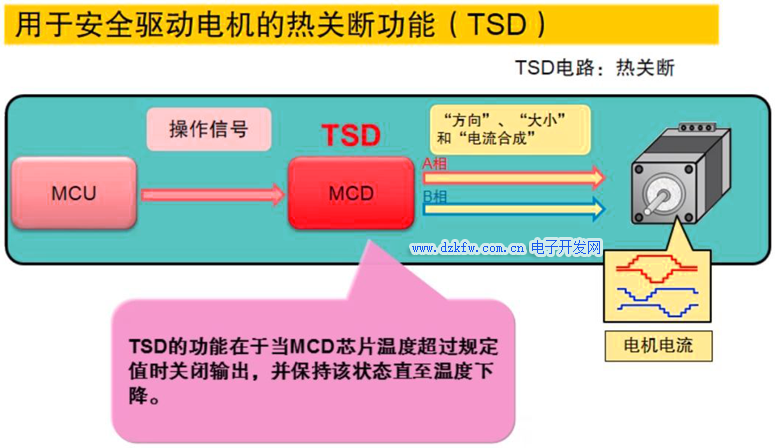
ü·ÍP(gu®°n)îýπ¶ƒÐ£®TSD£©
ü·ÍP(gu®°n)îýπ¶ƒÐ‘⁄”⁄£¨ÆîÎäôCøÿ÷∆Úå(q®±)Ñ”∆˜–æ∆¨úÿ∂»≥¨þ^“é(gu®©)∂®÷µïrÍP(gu®°n)È]ðî≥ˆ£¨≤¢±£≥÷‘ìÝÓëB(t®§i)÷±÷¡úÿ∂»œ¬Ωµ°£
 ∑µªÿÌî≤ø
∑µªÿÌî≤ø À¢–¬Ìì√Ê
À¢–¬Ìì√Ê œ¬µΩÌìµ◊
œ¬µΩÌìµ◊