
我們知道步進(jìn)電機(jī)由定子(stator)和轉(zhuǎn)子(rotor)構(gòu)成,定子繞組通電后產(chǎn)生感應(yīng)磁場(chǎng),感應(yīng)磁場(chǎng)與轉(zhuǎn)子相互作用而使轉(zhuǎn)子轉(zhuǎn)過一定的角度。通過控制定子繞組周期性、交替得電,就能控制步進(jìn)電機(jī)一步一步的向前運(yùn)動(dòng)。步進(jìn)電機(jī)轉(zhuǎn)子線圈這種周期性的控制需要專門的控制器來(lái)實(shí)現(xiàn),這個(gè)控制器就是今天我們要介紹的步進(jìn)驅(qū)動(dòng)器。
本節(jié)課將介紹如下內(nèi)容:
1)什么是步進(jìn)驅(qū)動(dòng)器?
2)步進(jìn)驅(qū)動(dòng)器的接線及設(shè)置;
3)步進(jìn)驅(qū)動(dòng)器細(xì)分驅(qū)動(dòng)設(shè)置;
4)步進(jìn)電機(jī)補(bǔ)充內(nèi)容;

1、什么是步進(jìn)驅(qū)動(dòng)器?
步進(jìn)驅(qū)動(dòng)器是驅(qū)動(dòng)步進(jìn)電機(jī)運(yùn)行的功率放大器,它能接收控制器(PLC/單片機(jī)等)發(fā)送來(lái)的控制信號(hào)并控制步進(jìn)電機(jī)轉(zhuǎn)過相應(yīng)的角度/步數(shù)。最常見的控制信號(hào)是脈沖信號(hào),步進(jìn)驅(qū)動(dòng)器接收到一個(gè)有效脈沖就控制步進(jìn)電機(jī)運(yùn)行一步。具有細(xì)分功能的步進(jìn)驅(qū)動(dòng)器可以改變步進(jìn)電機(jī)的固有步距角,達(dá)到更大的控制精度、降低振動(dòng)及提高輸出轉(zhuǎn)矩;除了脈沖信號(hào),具有總線通信功能的步進(jìn)驅(qū)動(dòng)器還能接收總線信號(hào)控制步進(jìn)電機(jī)進(jìn)行相應(yīng)的動(dòng)作。
2、步進(jìn)驅(qū)動(dòng)器的接線及設(shè)置
目前市場(chǎng)上有很多步進(jìn)驅(qū)動(dòng)器,各廠家的驅(qū)動(dòng)器具有類似的接口,都有信號(hào)、電源、電機(jī)等接線端子;有輸出電流及細(xì)分驅(qū)動(dòng)設(shè)置的撥碼開關(guān)。本節(jié)以雷賽科技(LeadShine)的DM542步進(jìn)驅(qū)動(dòng)器為例,介紹下步進(jìn)驅(qū)動(dòng)器的接線及設(shè)置。
DM542是雷賽公司推出的兩相步進(jìn)電機(jī)驅(qū)動(dòng)器,采用脈沖方式進(jìn)行控制,支持8檔位電流及16檔位細(xì)分驅(qū)動(dòng);輸入電壓范圍:DC 20V~50V,輸出峰值電流范圍:1.0~4.2A;下面這張圖是DM542的外觀圖:

從圖片中可以看出,DM542步進(jìn)驅(qū)動(dòng)器包括控制信號(hào)端子、電源端子、電機(jī)接線端子、輸出電流設(shè)置和細(xì)分驅(qū)動(dòng)設(shè)置撥碼開關(guān)等幾部分組成。
2.1、控制信號(hào)端子
控制信號(hào)端子與PLC、單片機(jī)或其它控制器相連接,用來(lái)接收控制器發(fā)出的脈沖、方向及使能控制信號(hào)。
2.1.1、脈沖信號(hào)(Pulse)
脈沖信號(hào)有兩個(gè)接線端子:PUL+和PUL-。'PUL+'連接脈沖信號(hào)正極,“PUL-”連接脈沖信號(hào)負(fù)極;脈沖信號(hào)以'PUL+'與'PUL-'的電壓差來(lái)衡量;撥碼開關(guān)SW13可設(shè)置脈沖的有效沿,默認(rèn)(SW13=OFF)上升沿有效;
2.1.2、方向信號(hào)(Direction)
方向信號(hào)有兩個(gè)接線端子:DIR+和DIR-。'DIR+'連接方向信號(hào)正極,'DIR-'連接方向信號(hào)負(fù)極;步進(jìn)電機(jī)的初始運(yùn)行方向與電機(jī)繞組的接線有關(guān),任何一組繞組互換(比如:A+和A-互換)都能改變電機(jī)的初始運(yùn)行方向;電機(jī)在運(yùn)行過程中的方向改變可以通過方向信號(hào)來(lái)控制,為了保證步進(jìn)電機(jī)可靠換向,方向信號(hào)應(yīng)早于脈沖信號(hào)至少5us建立;
2.1.3、使能信號(hào)(Enable)
使能信號(hào)用于使能或禁止驅(qū)動(dòng)器輸出,有兩個(gè)接線端子:ENA+和ENA-。'ENA+'連接使能信號(hào)正極,'ENA-'連接使能信號(hào)負(fù)極;當(dāng)'ENA+'信號(hào)接通時(shí),驅(qū)動(dòng)器將切斷步進(jìn)電機(jī)各相電源而使其處于自由狀態(tài),該狀態(tài)不響應(yīng)脈沖信號(hào);
注:脈沖信號(hào)、方向信號(hào)和使能信號(hào)輸入電壓值的大小可通過滑動(dòng)開關(guān)來(lái)設(shè)置,有DC 5V和DC 24V兩種選擇,出廠默認(rèn)DC 24V;
2.1.4、報(bào)警信號(hào)(Alarm)
驅(qū)動(dòng)器故障信號(hào)輸出,用于連接到PLC/控制器的輸入通道。出廠默認(rèn)正常情況下ALM和COM是導(dǎo)通狀態(tài),當(dāng)驅(qū)動(dòng)器報(bào)警時(shí)為截止?fàn)顟B(tài);可通過撥碼開關(guān)SW12設(shè)置;
2.1.4、抱閘信號(hào)(Brake):步進(jìn)電機(jī)的抱閘信號(hào)輸入;
2.1.5、COM:報(bào)警信號(hào)和抱閘信號(hào)的公共端;
2.2、電源接口
電源接口包括2個(gè)接線端子:+Vdc、GND,其中:
+Vdc:直流電源正極,電壓范圍:+20V~+50V,推薦+24V~+48V;
GND:直流電源負(fù)極;
2.3、電機(jī)接線端子
電機(jī)接線端子包括:A+、A-、B+、B-,其中:
A+和A-是步進(jìn)電機(jī)的A相繞組的兩個(gè)接線柱;
B+和B-是步進(jìn)電機(jī)的B相繞組的兩個(gè)接線柱;
下面這張圖是步進(jìn)電機(jī)驅(qū)動(dòng)器的接線圖:
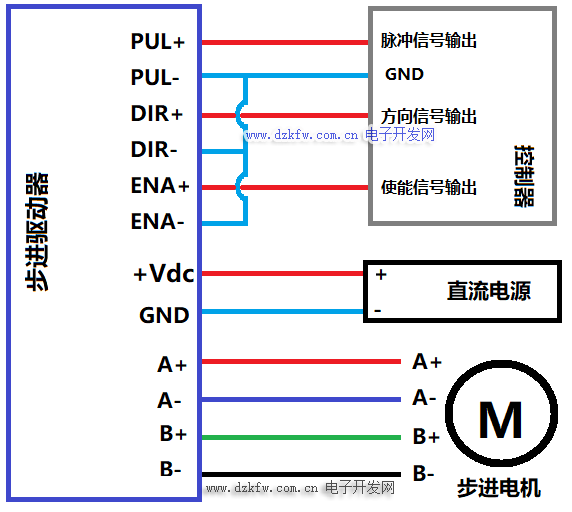
2.4、步進(jìn)電機(jī)的電流設(shè)置
DM542步進(jìn)驅(qū)動(dòng)器的中間有8個(gè)撥碼開關(guān)(SW1~SW8),其中SW1~SW3用來(lái)設(shè)置工作電流(動(dòng)態(tài)電流);SW4用來(lái)設(shè)置靜止電流(靜態(tài)電流);SW5~SW8是細(xì)分設(shè)置(將在第3小節(jié)詳細(xì)介紹);
2.4.1、工作電流設(shè)置
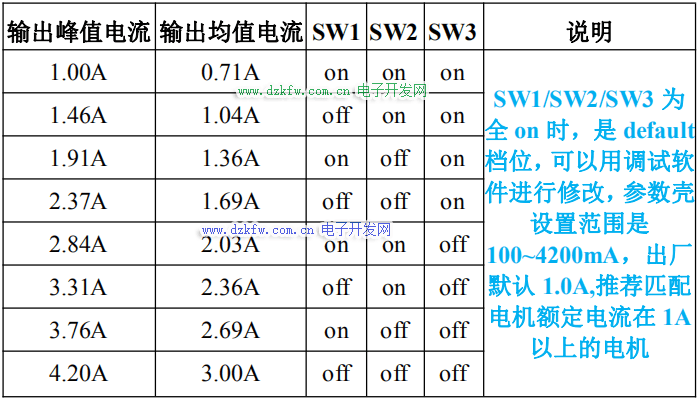
通過設(shè)置步進(jìn)驅(qū)動(dòng)器的電流輸出撥碼開關(guān),可以改變驅(qū)動(dòng)器的輸出電流大小。DM542的SW1~SW3撥碼開關(guān)設(shè)置如下圖所示:
當(dāng)步進(jìn)驅(qū)動(dòng)器設(shè)置的輸出電流越大時(shí),其連接的步進(jìn)電機(jī)的輸出力矩就越大。但是電流過大會(huì)導(dǎo)致電機(jī)和驅(qū)動(dòng)器發(fā)熱,嚴(yán)重時(shí)可能會(huì)損壞電機(jī)或驅(qū)動(dòng)器。因此在設(shè)置步進(jìn)驅(qū)動(dòng)器的電流時(shí)建議遵循如下原則:
-
四線電機(jī):設(shè)置輸出電流等于或略小于電機(jī)的額定電流;
-
六線電機(jī)高力矩模式:設(shè)置輸出電流等于電機(jī)單極性接法額定電流的50%;
-
六線電機(jī)高速模式:設(shè)置輸出電流等于電機(jī)單極性接法額定電流的100%;
舉個(gè)例子:假設(shè)要用DM542驅(qū)動(dòng)雷賽42CM06步進(jìn)電機(jī),該電機(jī)的額定電流為2.5A,我們就采用輸出均值電流2.36A的檔位,設(shè)置SW1=OFF,SW2=ON,SW3=OFF;
另外要注意:步進(jìn)電機(jī)的運(yùn)動(dòng)類型及停留時(shí)間的長(zhǎng)短,都會(huì)影響其發(fā)熱量。因此在實(shí)際使用中應(yīng)視電機(jī)的發(fā)熱情況適當(dāng)調(diào)節(jié)輸出電流的大小。原則上如果電機(jī)運(yùn)行15~30分鐘后如果表面溫度低于40度,可適當(dāng)增加電流設(shè)置值以增大輸出扭矩;但如果溫升太高(>70度),則應(yīng)降低電流的設(shè)置值;
2.4.2、靜止電流設(shè)置
撥碼開關(guān)SW4可用于設(shè)置步進(jìn)電機(jī)在靜止?fàn)顟B(tài)時(shí)驅(qū)動(dòng)器的輸出電流。默認(rèn)情況下SW4=OFF,它表示驅(qū)動(dòng)器在沒有接收到脈沖0.4秒后,將輸出電流改變?yōu)榉逯惦娏鞯?0%,這樣可以降低驅(qū)動(dòng)器和電機(jī)的發(fā)熱;如果將SW4設(shè)置為ON,則電機(jī)在靜止?fàn)顟B(tài)下,驅(qū)動(dòng)器的輸出電流為其峰值電流的90%;
3、細(xì)分驅(qū)動(dòng)設(shè)置
3.1、什么是細(xì)分驅(qū)動(dòng)?
步進(jìn)電機(jī)在出廠時(shí)都標(biāo)注了“固有步距角”。比如某電機(jī)的固有步距角為0.9度/1.8度,表示電機(jī)半步工作每次會(huì)轉(zhuǎn)過0.9度,整步1.8度。在很多精密控制的場(chǎng)合,固有步距角不能滿足控制精度的要求,人們希望能將一個(gè)固有步距角分很多步來(lái)走完。這種將固有步距角再分成很多步的驅(qū)動(dòng)方法,稱為'細(xì)分驅(qū)動(dòng)'。能實(shí)現(xiàn)細(xì)分驅(qū)動(dòng)的驅(qū)動(dòng)器,稱為'細(xì)分驅(qū)動(dòng)器'。
3.2、細(xì)分驅(qū)動(dòng)的優(yōu)點(diǎn)
-
細(xì)分驅(qū)動(dòng)將固有步距角平均分成幾份,減少了每步的步距角的大小,提高了步距均勻度,提高了控制精度;
-
低頻振蕩是步進(jìn)電機(jī)的固有特性,細(xì)分驅(qū)動(dòng)提高了電機(jī)的轉(zhuǎn)動(dòng)頻率,可以降低電機(jī)的振動(dòng);
-
細(xì)分驅(qū)動(dòng)可以有效減少轉(zhuǎn)矩波動(dòng),提高輸出轉(zhuǎn)矩;
3.4、細(xì)分驅(qū)動(dòng)的設(shè)置
以DM542為例,該驅(qū)動(dòng)器提供了四個(gè)撥碼開關(guān)(SW5~SW8)用來(lái)設(shè)置細(xì)分驅(qū)動(dòng),如下圖所示:
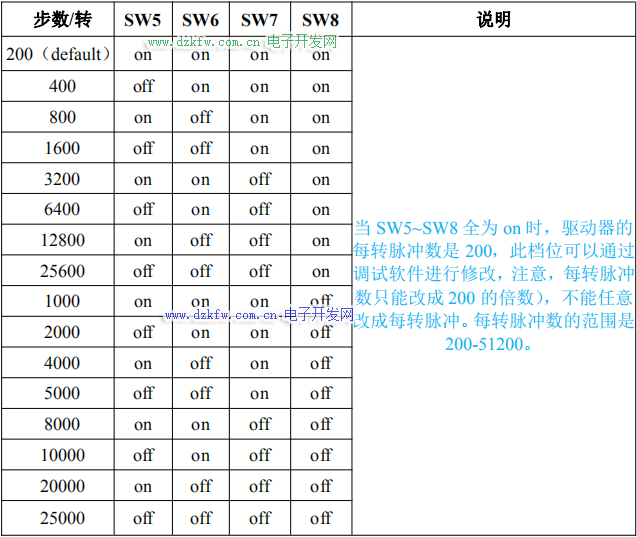
假設(shè)我們要把電機(jī)設(shè)置為3200步/轉(zhuǎn)(即每轉(zhuǎn)一圈需要3200個(gè)脈沖信號(hào)),則撥碼開關(guān)設(shè)置如下:SW5=ON,SW6=ON,SW7=OFF,SW8=ON
4、步進(jìn)電機(jī)補(bǔ)充內(nèi)容
問:平時(shí)說(shuō)的42系列、57系列步進(jìn)電機(jī)具體代表什么意思?
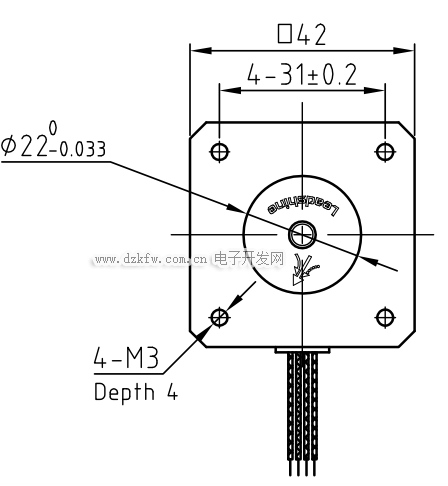
答:這里說(shuō)的42系列、57系列,是指步進(jìn)電機(jī)的機(jī)座號(hào),也就是步進(jìn)電機(jī)機(jī)座的尺寸。42系列步進(jìn)電機(jī)表示該電機(jī)機(jī)座的尺寸為42cmx42cm。例如,下圖是雷賽42型步進(jìn)電機(jī)機(jī)座截面圖:
根據(jù)機(jī)座號(hào)區(qū)分,常見的步進(jìn)電機(jī)有42系列、57系列、86系列、110系列等等;
 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底