
之前我們講解過S7-200SMART運動控制向導的組態應用,組態好向導后自動生成運動子程序,只需調用對應功能的子程序進行編程即可,那么今天我們分別學習一下常用的子程序的應用。
1、200 SMART運動控制指令AXIS0_CTRL ,初始化運動軸指令,對每個軸必須要啟用一條初始化指令。而且要保證EN和MOD_EN一直是接通狀態(SM0.0)
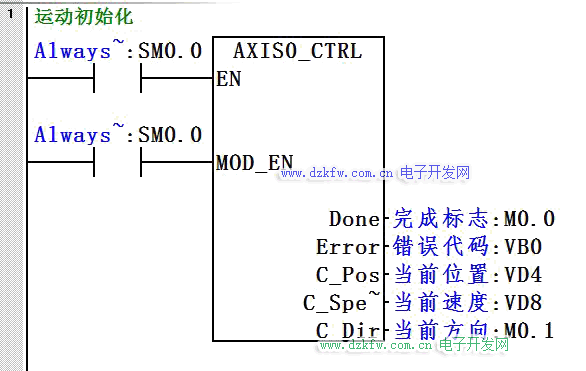
Done:初始化完成標志,正在初始化為OFF,完成則變成為ON。
Error:顯示錯誤代碼編號,詳情打開幫助查看運動軸錯誤代碼。
C_Pos:當前位置,相對脈沖方式時單位為脈沖數,工程單位則為mm等,其它的子例程中類似,不做另外的說明。
C_Speed:當前速度,相對脈沖時單位為HZ,工程單位則為mm/s,其它子例程中類似,不做另外的說明。
C_Dir:表示電機的當前方向信號狀態 ,0 = 正向, 則1 = 反向。
2.手動子例程,可以手動以指定速度正反轉運行,也可以按照向導組態的JOG速度點動正反轉運行。
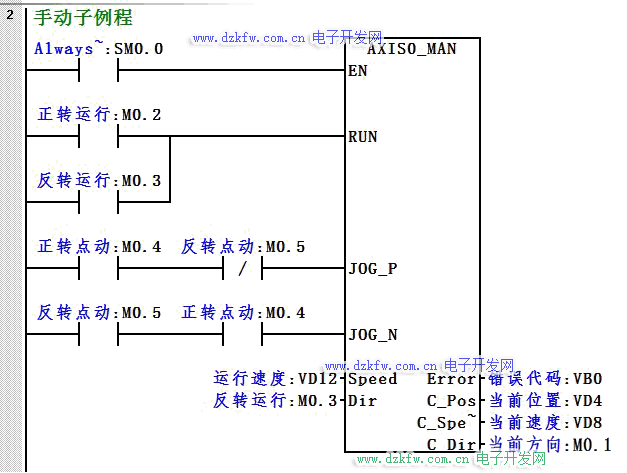
RUN:接通時以Speed中指定的速度連續運行,在運行過程中改變速度就會立刻生效,接通Dir可以切換運行方向(在運行時切換無效)。
JOG_P:正轉點動,速度在以向導中組態的電機點的動速度(JOG_SPEED)。
JOU_N:反轉點動。
3、單段定量發脈沖子例程,可以以指定的速度和數量來發送脈沖,發送完成后即自動停止。
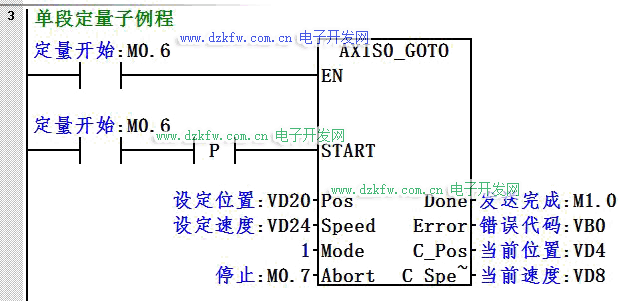
START:觸發開始發脈沖信號,必須在運動軸空閑時發送一次信號,必須要用邊沿觸發。
POS:設定的數量,相對模式時為距離,絕對模式時為位置。
Speed:設定運行的速度。
Mode:模式選擇,=0絕對,=1相對。
絕對:必須建立一個參考點(零點),所有位置都應該以該點為參考,要運行到何處,只需要設定該處的絕對位置系統自動根據當前位置識別方向和行進的距離,該模式適合做定位控制。
如下圖中當前位置處在A處,如果設定位置為200,則自動前進到200,如果設定位置為100,則自動后退到100處。

相對:亦稱增量模式,無需建立參考點,每次以當前位置為起點,運行一個相對距離,不方便進行定位控制。如下圖所示。

Abort:觸發停止命令,為ON時命令運動軸減速直至停止。
Done:發送脈沖結束標志,正在發脈沖時為OFF,停止發脈沖時為ON。中途由于其它原因停止也會觸發Done動作,所以不一定是達到設定位置。
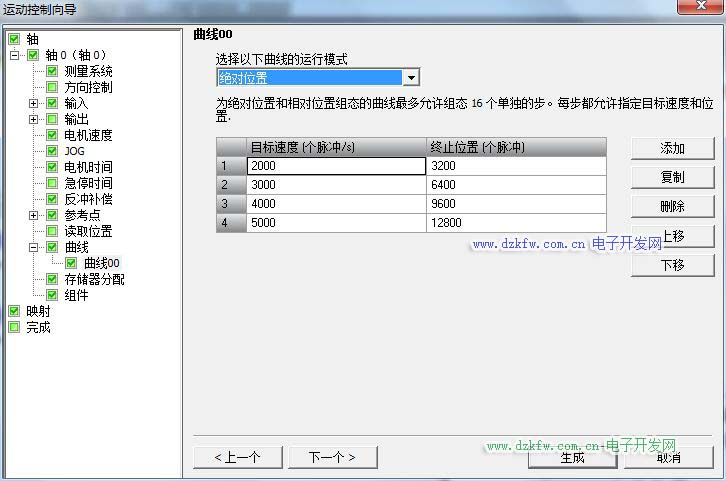
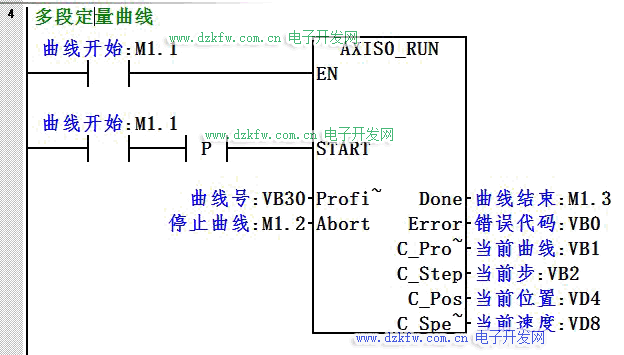
4.多段定量曲線運動。提前在向導中組態好曲線,可以組態為絕對或相對,再通過該指令調用組態的曲線號(從0號開始)。最多可組態32條曲線,每條曲線中可以組態16個單步,每個單步的方向必須一致,否則報錯。
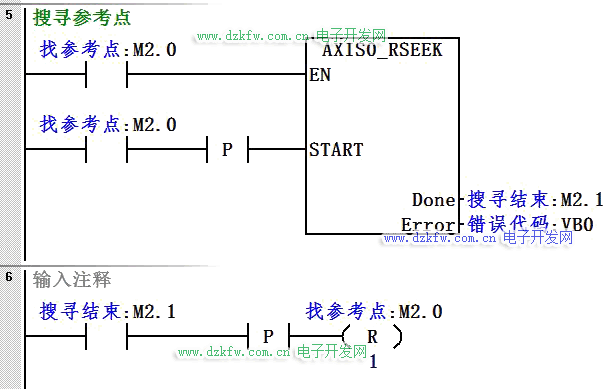
5、搜尋RPS參考點。在進行絕對定位前,需要建立參考點,參考點有兩種,一是存在RPS信號的實際參考點,一是內部定義的一個虛擬參考點,啟用RSEEK會根據向導中組態的搜尋速度、方向和搜尋順序來搜尋RPS參考點。
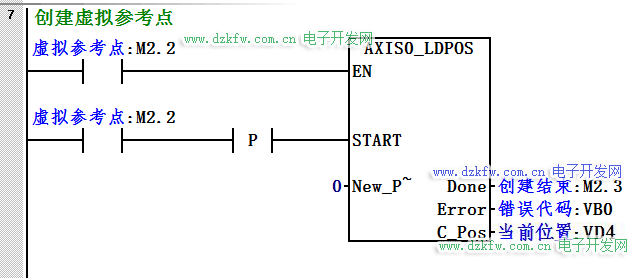
6、內部創建虛擬參考點。適用于一些不方便設定一個固定參考點的場合,啟用LDPOS會將當前位置更改成指定的New_POS,可以建立虛擬參考點或用于更改當前位置。
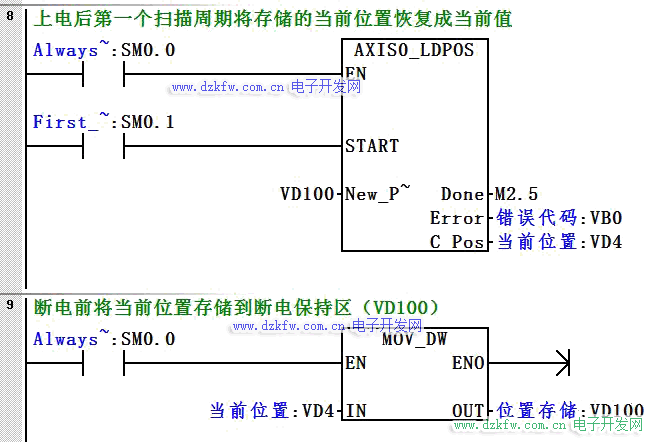
7、設置當前位置斷電保持。兩個程序段不能顛倒順序,否則將無法實現。
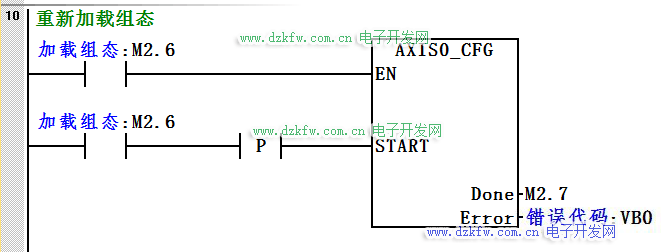
8、重新加載組態,修改任何組態相關的參數可用CFG進行刷新,否則可能無法生效。
以上介紹了一下常用的運動子例程的使用,你們都學會了嗎?
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底