
本節主要包括如下一些內容:
1、什么是運動控制(Motion Control)?
運動控制(Motion Control)是電氣自動化控制的一個分支(常見的電氣自動化控制包括過程控制、運動控制等),它是通過控制被控對象(通常是步進電機或者伺服電機)的速度、位移、力矩等物理量,來完成指定的控制任務。比如工業自動化中工作臺往復運動的控制、3D打印機的控制、數控機床的控制、工業機器人的控制等都屬于運動控制的范疇。
根據控制的難易程度的不同,運動控制又可分為通用運動控制和復雜運動控制。
"通用運動控制(General Motion Control)"是指被控對象的運動形式相對比較簡單(比如工作臺的往復運動)、通常只需要控制一個軸、其運動軌跡多為直線的運動控制;
"復雜運動控制(Complex Motion Control)"是指那些需要控制多個軸協調運動的、運動軌跡比較復雜的、對被控對象的速度、位置、力矩等物理量精度要求比較高的運動控制(比如數控機床、工業機器人的控制);
無論是通用運動控制還是復雜運動控制,都是由運動控制系統(Motion Control System)完成的。
一個完整運動控制系統包括運動控制器、步進驅動器或者伺服驅動器、步進電機或者伺服電機組成。由于伺服電機本身集成編碼器,因此通常構成閉環控制系統;而步進電機本身沒有編碼器,因此多構成開環控制系統。當然,這也不是絕對的。可以通過在運動軸上安裝編碼器而使步進電機驅動的軸也構成閉環系統。
典型的運動控制系統如下圖所示:
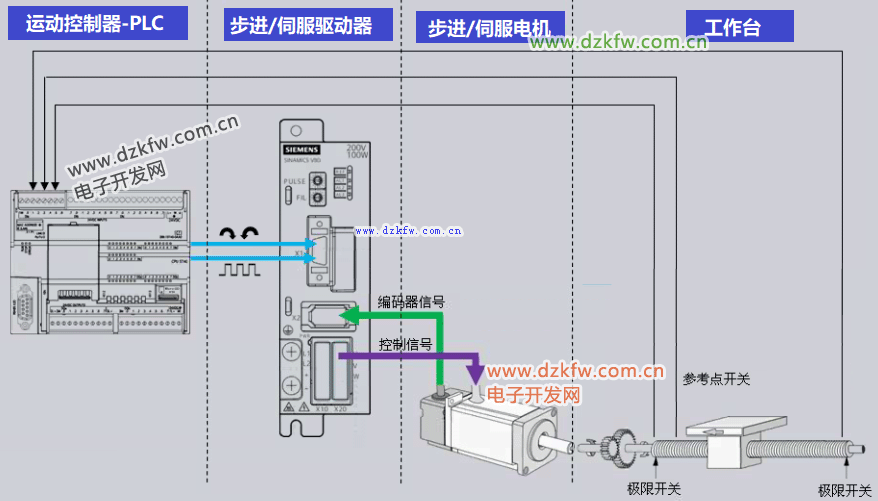
運動控制器通過發送脈沖或者通信的方式將控制信號發送給步進驅動器或者伺服驅動器,步進驅動器或者伺服驅動器再根據控制指令驅動步進電機或者伺服電機進行運動。
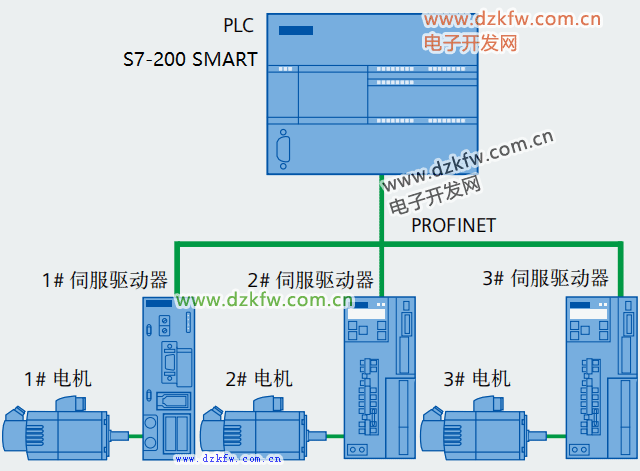
1)、通信的方式:
S7-200 SMART標準型CPU可以通過PROFINET通信的方式將控制信號發送給SINAMICS V90伺服驅動器(PN版本),后者可以控制伺服電機進行運動;除了PROFINET,其它PLC還有支持Modbus、CANopen等通信協議的版本;下面這張圖是S7-200 SMART通過PROFINET網絡控制三臺伺服驅動器的示意圖:
2)、脈沖的方式:
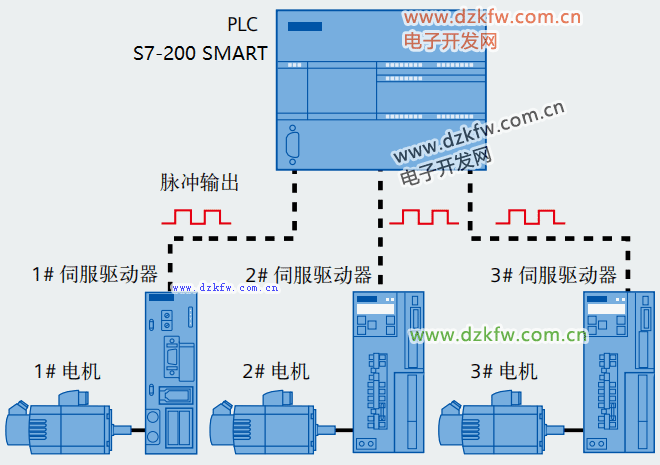
運動控制器通過發送占空比為50%的脈沖信號給步進/伺服驅動器,后者驅動步進電機或者伺服電機進行運動。根據設置的不同,脈沖信號可以有1路或者2路,用來指示轉速或者方向。這種信號輸出方式也稱為PTO(Pulse Train Output),即"脈沖串輸出"。
SINAMICS V90有PTI版本,這里的PTI是指(Pulse Train Input),即"脈沖串輸入",也就是說該版本的伺服驅動器接收PTO信號。
下面這張圖是S7-200 SMART使用脈沖的方式控制三臺伺服驅動器的示意圖:
注意:S7-200 SMART晶體管型的CPU可以輸出脈沖串(PTO),繼電器輸出型不能輸出PTO,選型的時候要加以區分;S7-200 SMART高速脈沖的頻率范圍為:2Hz~100KHz(即每秒2個脈沖到每秒100,000個脈沖);
3、S7-200 SMART的運動軸為了方便的進行運動控制,S7-200 SMART引入了運動軸的概念。
運動軸是一個邏輯上的概念,簡單理解,它是一個直線型的、包括輸出(電機)信號和輸入(限位)信號的軸。
S7-200 SMART標準型CPU支持運動控制功能。其中,CPU ST20最多支持2個運動軸;CPU ST40和ST60最多支持3個運動軸;
每個運動軸都有三個輸出信號:P0、P1和DIS信號;
P0和P1用于控制電機的速度和方向,有四種配置方式:單相(2路脈沖輸出)、雙相(2路脈沖輸出)、A/B相位正交(2路脈沖輸出)、單相(1路脈沖輸出);
DIS信號為源型輸出,用來禁止或使能步進驅動器或伺服驅動器;
三個運動軸的P0、P1和DIS對應的輸出通道如下表:
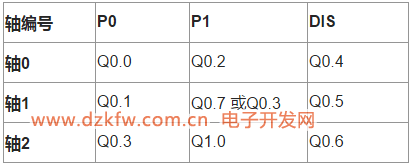
注意:如果軸1組態為單相兩路輸出(脈沖+方向),則P1分配到Q0.7;如果軸1組態為雙向輸出或者A/B相輸出,則P1被分配到Q0.3,但此時軸2將不能使用;
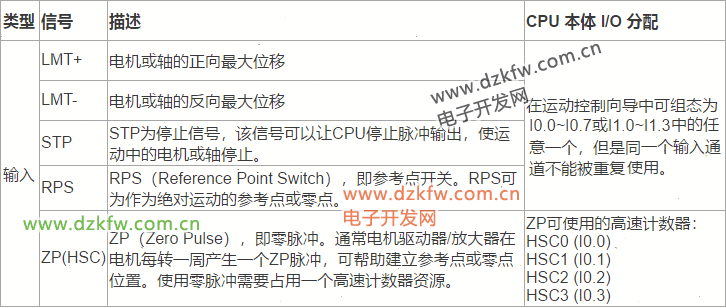
除了輸出信號,每個運動軸還有對應的輸入信號,比如工作臺的左右限位信號、參考點信號、零脈沖信號等等。下面這張表格是CPU輸入通道對應的運動軸信號:
S7-200 SMART提供運動控制向導對運動軸進行組態;運動軸的測量系統可以是工程單位(比如mm),也可以是脈沖數;支持絕對位置、相對位置的運動;支持參考點查找;提供可組態的反沖補償;最多支持32組曲線,每組曲線最多支持16 步;提供運動控制面板用于手動調試;
除了運動控制向導,也可以通過PLS指令來控制PTO信號的輸出。這些內容將在后續文章中詳細介紹。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底