
1. 新功能解讀
S7-200 SMART CPU自面世以來,憑借其優秀的性能受到了用戶的廣泛好評。2022年9月6日,V2.7固件正式發布,下面為大家介紹一下新版本有什么特點,增加了哪些新功能。
1.1 超馳功能
概念:超馳是指運動控制指令之間相互覆蓋的情況,用戶可以用新的指令覆蓋正在執行的命令,超馳功能一旦激活將會中止當前動作并立即執行新的命令。
優點:軸不用停止,可以平滑過渡到新的指令或是同一指令的新參數。
功能說明:S7-200 SMART V2.7目前僅支持在相同指令間觸發超馳響應。支持兩種指令:一種是通過運動控制向導方式生成的AXISx_GOTO指令,另外一種是通過PLS指令。
AXISx_GOTO指令
· 支持的運動模式:
對于AXISx_GOTO指令,僅在絕對運動模式和相對運動模式支持超馳功能,
兩種運動模式之間可以相互觸發超馳響應,同一個模式的指令也可以先后激活以觸發超馳響應。
· 觸發超馳的方式:
正在執行的AXISx_GOTO指令再次通過START管腳上升沿被激活;
正在執行AXISx_GOTO指令時,激活另一個AXISx_GOTO指令。
· 可調整的參數:
超馳功能可用于更改正在運行的AXISx_GOTO指令的速度、位置和運動模式,(僅支持模式0 和模式1)。
· 超馳觸發后的過程:
如果速度已更改,CPU 將加速或減速,以達到新的目標速度;
如果運動方向改變,CPU 將減速至停止,然后再沿更改的方向運動;
超馳中的無效組態,將打斷當前的運動(比如新的AXISx_GOTO指令為絕對運動模式, 但觸發指令之前未建立參考點)。
PLS 指令
· 支持的模式:
PLS指令中僅PTO單段模式支持超馳響應。
· 觸發超馳的方式:
PTO控制字節(SMB67、SMB77 和SMB567) 中使能超馳響應,通過上升沿重新激活正在運行的 PLS 指令。
通過在PTO 控制字節 (SMB67、SMB77 和SMB567) 中使能超馳響應,激活另一個 PLS 指令。
· 可調整的參數:
超馳功能可用于更改正在運行的 PLS 指令的頻率和脈沖計數。
1.2 運動軸組
V2.7之前固件版本的S7-200SMART僅支持單軸的運動,對于多軸之間的協調聯動需要編程實現。例如需要將木材加工成復雜的多邊形,就需要三軸配合完成。
STEP 7‑Micro/WIN SMART V2.7 軟件配合S7-200 SMART V2.7 CPU 固件支持基于PTO(脈沖串輸出)開環的2D/3D直線插補運動功能。
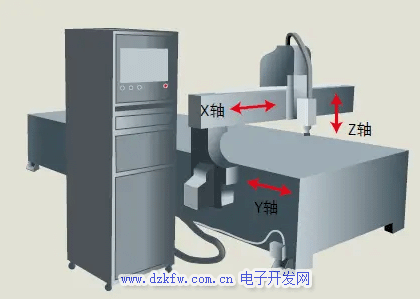
圖1 木工機械裝置
功能說明:通過運動控制向導軸組功能,實現2軸或者3軸的直線插補運動。軸組由軸組成,軸組和軸的關系是靜態的,不支持動態配置。
實現方式:在運動控制向導中配置軸組后,有兩種方式可以對軸組進行操作。
第一種是配置軸組后,不對軸組進行路徑規劃。第二種是配置軸組后,對軸組進行路徑規劃。
目前只有一個軸組可以使用,軸組的X 軸對應軸0,軸組的Y 軸對應軸1,軸組的Z 軸(如果適用)對應軸2。
· 配置軸組后,不對軸組進行路徑規劃
使用運動向導組態軸組,自動生成的GRP0_2/3D_MOVELINEAR指令,該指令控制軸組實現從實際位置到目標位置的 2D/3D 直線插補運動。
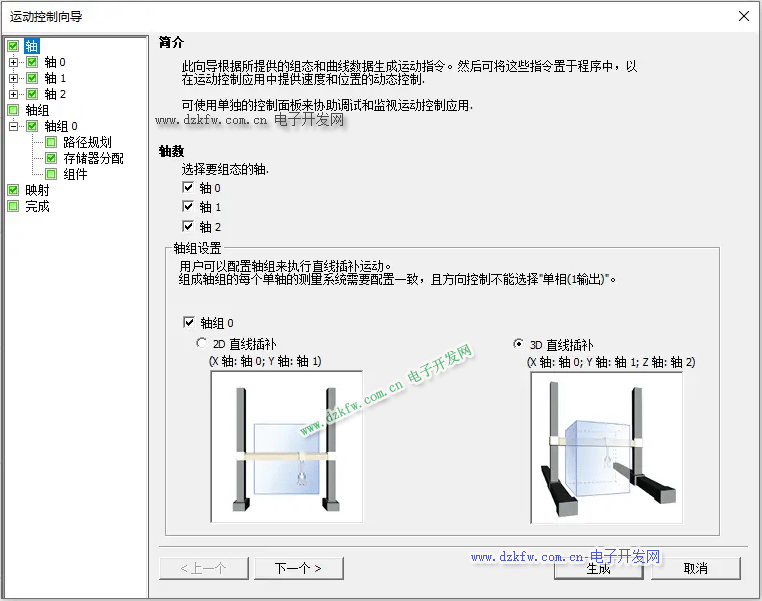
圖2 配置軸組
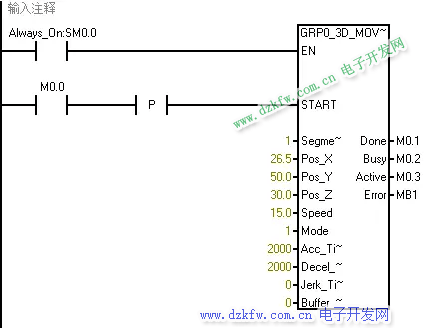
圖3 GRP0_2/3D_MOVELINEAR指令
· 配置軸組后,對軸組進行路徑規劃
使用運動向導組態軸組,并在向導中對軸組的運動路徑進行規劃,使用向導生成的GRP0_MOVEPATH指令觸發向導中規劃的路徑。軸組的路徑規劃功能可配置的路徑最多為128條,軸組路徑規劃功能僅適用于絕對運動模式。
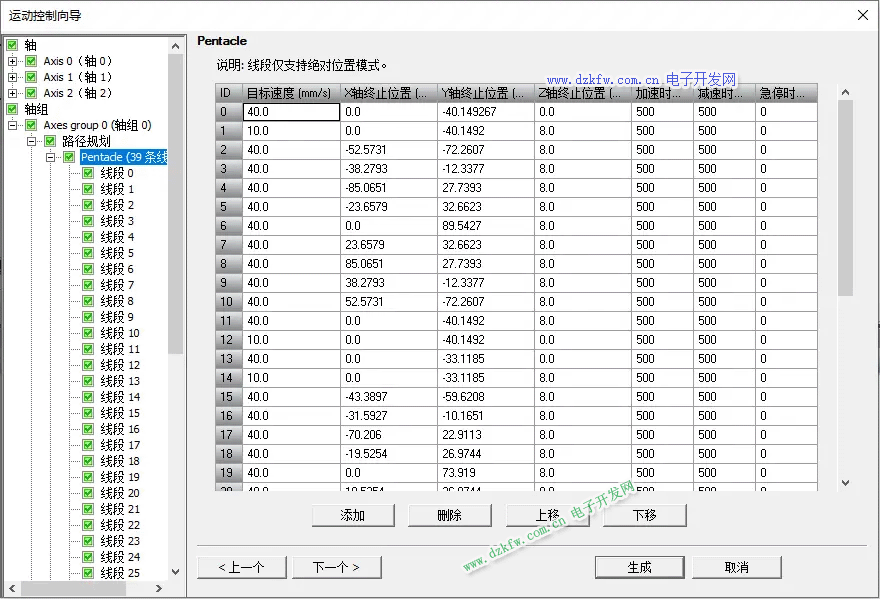
圖4 對軸組進行路徑規劃
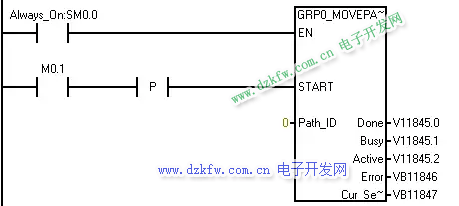
圖5 GRP0_MOVEPATH指令
1.3 用戶自定義Web界面
功能說明:STEP 7‑Micro/WIN SMART V2.7軟件配合S7-200 SMART V2.7 CPU 固件增加了Web 服務器用戶自定義Web頁面功能。利用 SMART Web Editor工具,用戶可創建自定義Web頁面項目,并將該項目下載到 CPU當中。

圖6 SMART Web Editor 組態界面
優點:通過SMART Web Editor 組態工具,可以快速的開發基于Web的人機界面,按鈕、儀表盤、趨勢圖等控件可以滿足基本的使用要求,大大的縮短產品開發周期。
1.4 Web API(應用程序編程接口)
功能說明:STEP 7‑Micro/WIN SMART V2.7軟件配合S7-200 SMART V2.7 CPU固件增加了Web API功能,為用戶提供了從終端設備讀取和寫入 CPU數據的接口。簡單的說,就是不使用SMART Web Editor組態工具,自行開發網頁或者應用程序,利用Web API訪問CPU數據。
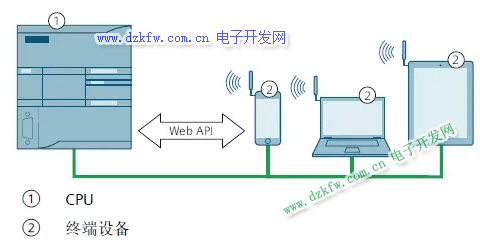
圖7 CPU 通過以太網端口支持 Web API功能
2 產品訂貨信息
以上內容就是本次S7-200 SMART V2.7 CPU固件新增功能的大致描述,對于V2.6固件的CPU若是需要使用以上功能,需要將固件升級到V2.7版本。
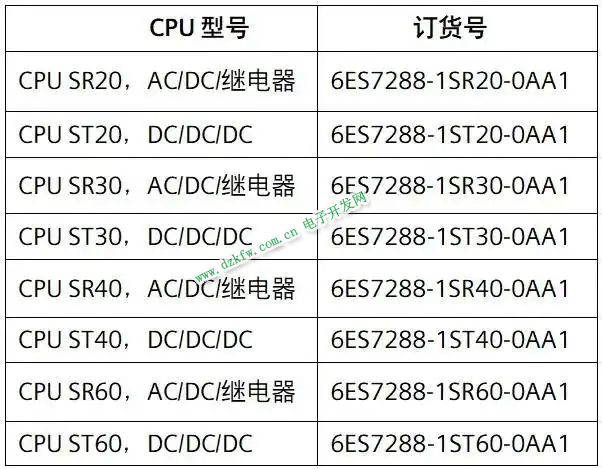
表格1 V2.7 固件對應的 CPU 型號
說明:
-
固件版本為 V2.7 的 CPU 型號不能降級到 V2.6 或任何以前的版本。
-
先前訂貨號以 0AA0 結尾的任何 SR 或 ST 型號都不能升級到 V2.7。
-
訂貨號以 0AA1 結尾的 CPU 型號不能降級為任何之前的固件版本。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底