
1、什么是運動控制
運動控制,也可叫做電力拖動控制;它是自動化的一個分支,其動力源大部分都基于電動機。
也就是說,運動控制其實是基于電動機,實現物體對于角位移、速度、轉矩等物理量改變的控制。
這里面,又將運動控制進行劃分為兩個方向,一個是用于機械行業的運動控制,另一個是用于化工行業的過程控制。
在上面提到,運動控制其實是基于電動機的,這里的電動機指的是伺服電機;
如果一套單機設備上只用了一臺伺服電機,這種情況下是更注重于對電機的一個控制,如位置、速度、轉矩的控制;這個例子,是想單臺電機控制只是運動控制的一個環節。
而運動控制主要是針對產品,整體包含機械(電動機只是機械中的零配件)、電氣、軟件等,是對機械運動部件的位置、速度等進行實時的控制管理,使其按照預定的控制方案轉變為期望的機械運動的控制。
2、運動控制應用的場景
運動控制系統是以機械運動的驅動設備——電動機為控制對象,以控制器為核心,以電力電子功率變換裝置為執行機構組成的。常見的如電動機、變頻裝置和控制器三部分組成傳動機構。
對機械運動部件的位置、速度等進行實時的控制管理,使其按照預度期的運動軌跡和規定的運動參數進行運動。所以,生產機械、運輸機械等生產領域均有十分重要的應用價值。
2.1 調速應用
風機、泵類機械為了節能,要根據負載輕重進行調速;機床加工,要根據工件精度的不同要求進行調速;運輸機械為了提高生產率需要進行調速;電梯為了提高舒適度也需要進行調速。

2.2 伺服系統應用
基于電動機的控制,以實現物體對角位移、轉矩、轉速等物理量改變的控制。不同于單純的電機控制,運動控制關注點在于協調多個電機,完成指定的運動,尤其用于精確定位的場合。

2.3 智能倉庫
1、菜鳥無人倉庫
兩分鐘看懂菜鳥智能倉庫流程 www.bilibili.com/video/BV1sK4y1k7h1/
2、京東無人倉配智能分揀系統
=3、運動控制系統的組成
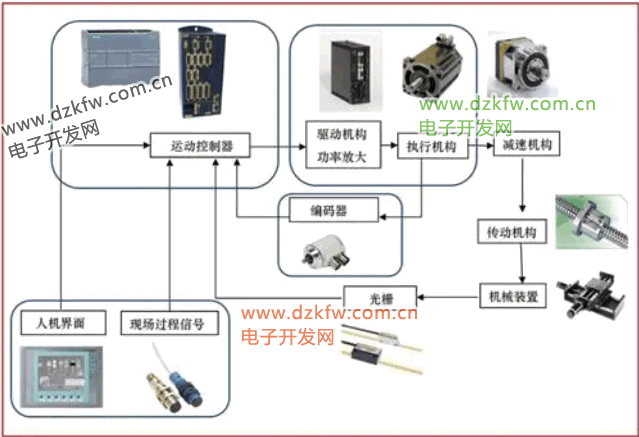
運動控制器:常見的就是plc啦;
驅動器:工控人對驅動器應該再熟悉不過了;
執行機構:伺服電機;
減速機構:減速器;
光柵:編碼器的一種;(一般用于車床加工)
人機界面:大家熟悉的觸摸屏。
執行流程: 由運動控制器發出命令,給驅動機構進行功率放大,將放大后的信號傳給執行機構(伺服電機),伺服電機自帶編碼器,能夠實現**半閉環控制**;伺服電機由傳動機構控制機械,在機械裝置上安裝了光柵尺(也是編碼器),實現**全閉環控制**。操作人員在現場可通過人機界面去進行整個環節的**調試操作**。
4、三菱PLC開發運動控制需的環境
-
一個PLC或者運動板卡 (220V)
-
一個DC 24V開關電源 (步進電機使用單獨電源別和PLC用同一個)
- 一個步進驅動器
- 一個步進電機 (1.8°)
- 絲桿螺距4mm距離
把脈沖轉換為距離

5、GXWork3工具使用
5.1 配置網絡
5.2 測試是否能正常通信
PLCData.PLC = new Mitsubishi.McProtocolTcp("192.168.9.200", 6000, Mitsubishi.McFrame.MC3E);
await PLCData.PLC.Open();
PLCData<int> ints = new PLCData<int>(Mitsubishi.PlcDeviceType.X, 0, 1);
await Task.Run(async () =>
{
while(true)
{
await ints.ReadData();
Console.WriteLine($"ints[0]={ints[0]}");
Thread.Sleep(2000);
}
});
Console.ReadKey();
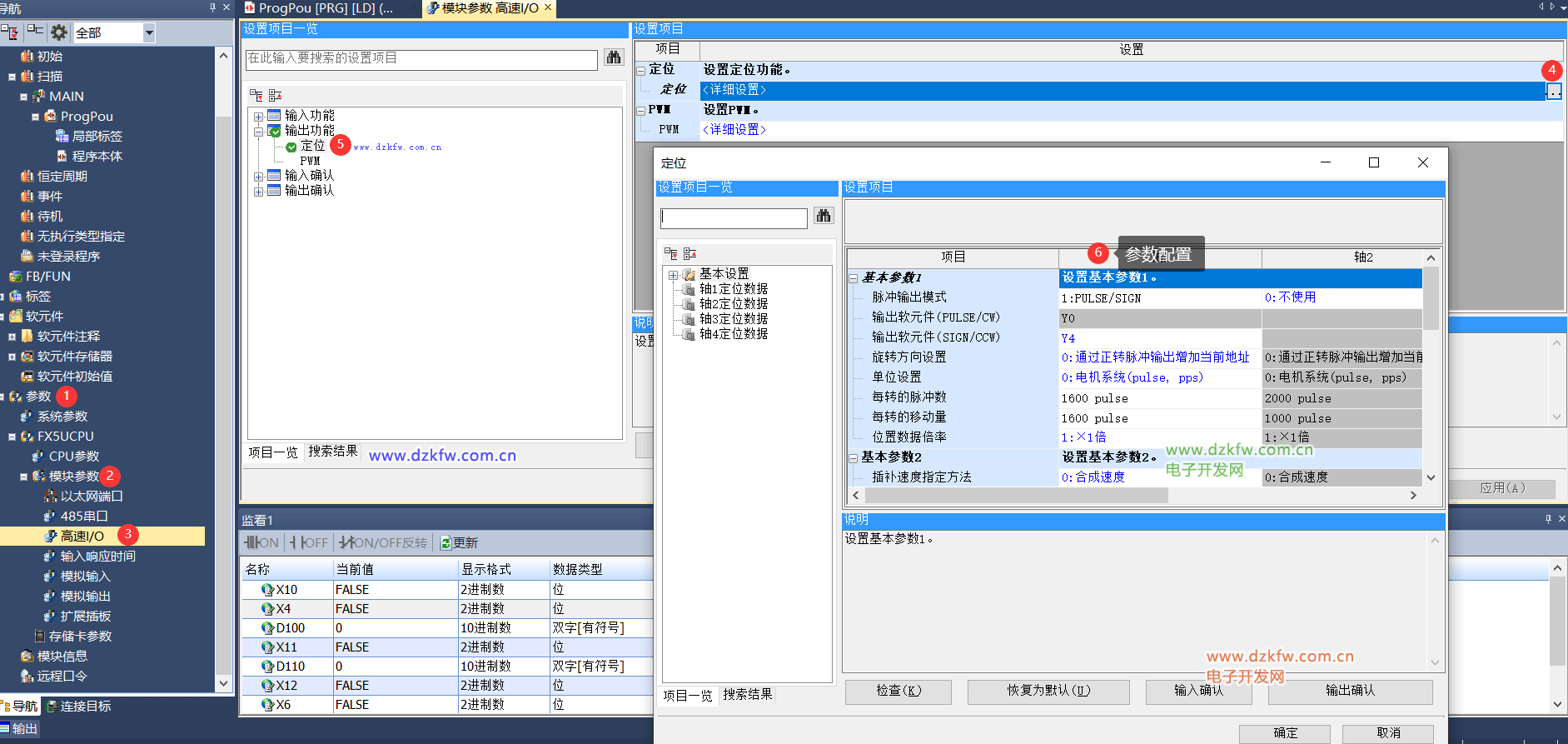
5.3 配置三菱高速IO
6、三菱PLC運動控制文檔查閱
6.1 文檔下載
6.2 定位篇內容介紹
6.2.1 機械原點回歸
6.2.2 相對定位
6.2.3 絕對定位
6.2.4 三菱特殊繼電器表格

7、編寫梯形圖
梯形圖常用快捷指令
ldi 常閉觸點
ld 常開觸點
out 輸出線圈
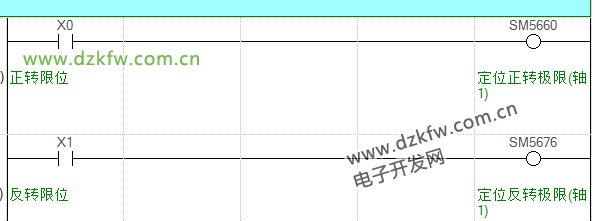
7.0 限位開發
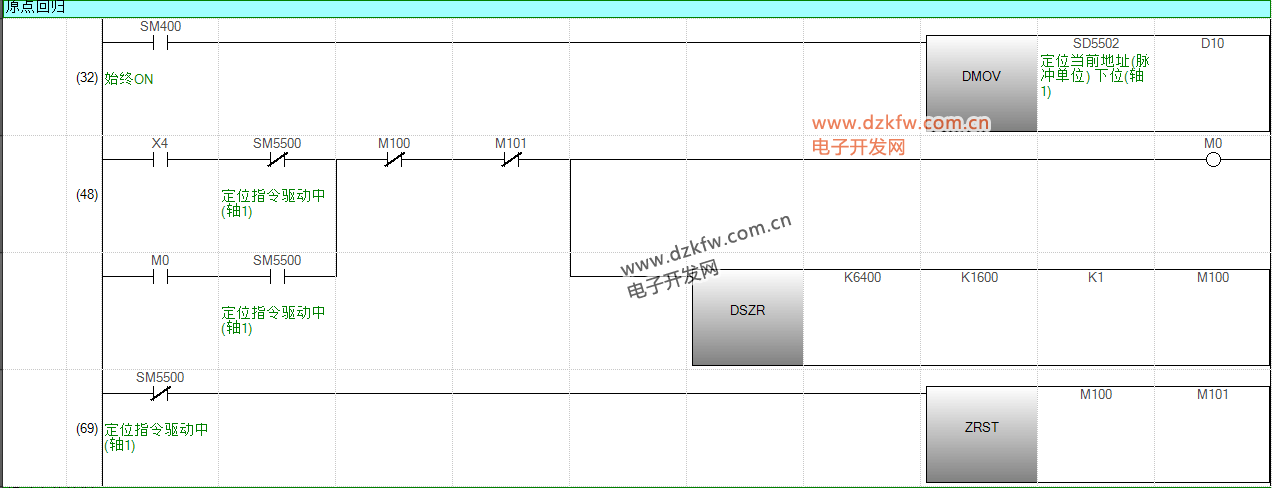
7.1 原點回歸編寫
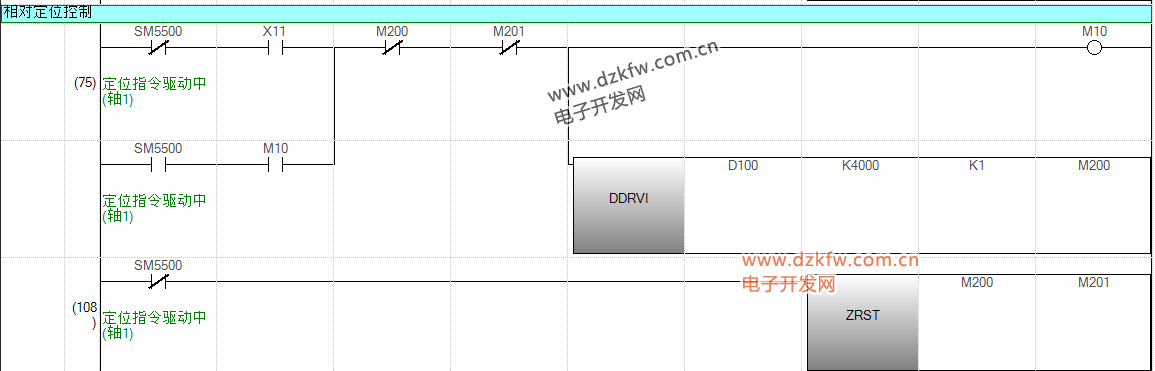
7.2 相對定位
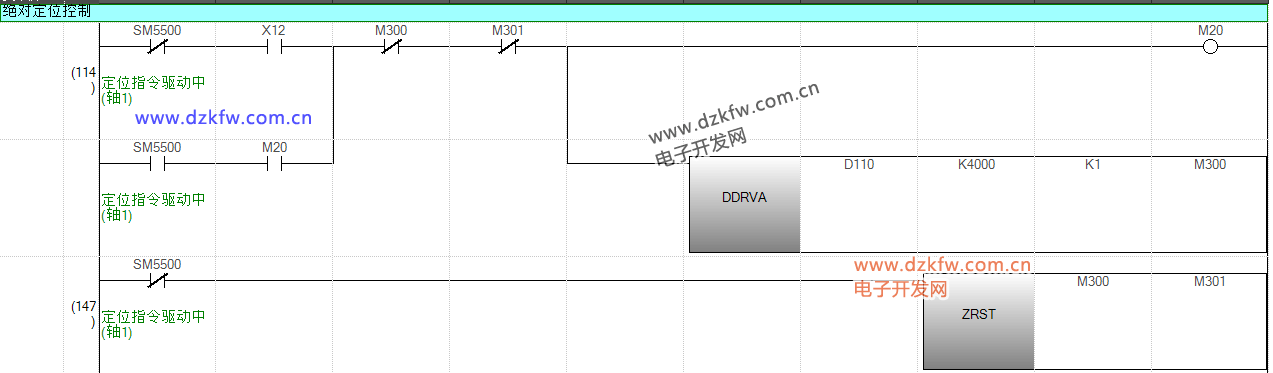
7.3 絕對定位
8、上位機通訊與軟元件讀寫操作
- 點位數據表編寫與查詢
- 基于界面實現原點回歸
- 實現相對定位和正轉和反轉
- 實現絕對定位
- 實現急停功能
- 實現定位控制功能
- 實現速度控制
9、朝夕運動控制系統界面設計

10、運動控制系統與三菱PLC對接完成數據同步
什么是驅動器的細分?運行拍數與步距角是什么關系?
“細分”是針對“步距角”而言的。沒有細分狀態,控制系統每發一個步進脈沖信號,步進電機就按照整步旋轉一個特定的角度。步進電機的參數,都會給出一個步距角的值。如110BYG250A型電機給出的值為0.9°/1.8°(表示半步工作時為0.9°、整步工作時為1.8°),這是步進電機固有步距角。通過步進電機驅動器設置的細分狀態,步進電機將會按照細分的步距角旋轉位移角度,從而實現更為精密的定位。以110BYG250A電機為例,列表說明:
電機固有步距角 運行拍數 細分數 電機運行時的真正步距角
0.9°/1.8° 8 2細分,即半步狀態 0.9°
0.9°/1.8° 20 5細分狀態 0.36°
0.9°/1.8° 40 10細分狀態 0.18°
0.9°/1.8° 80 20細分狀態 0.09°
0.9°/1.8° 160 40細分狀態 0.045°
11、運動控制系統其他功能完善與調試
1600個脈沖 4mm
1mm = 400個脈沖
cm和像素變化,它們都是線性的變化量
y=kx+b
x: 小車實際位置,單位cm
y: 小車在軟件上的位置坐標,單位px
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底