
一、步進驅動系統
步進驅動系統包含步進電動機和步進驅動器,前端由PLC發脈沖。
步進電機是將電脈沖信號轉變為角位移或線位移以控制轉子轉動的開環控制電機(可以通過安裝編碼器形成閉環系統)。
它旋轉是以固定的角度(步距角)一步一步運行的,故稱步進電機。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,因此具有較高的定位精度。
步進驅動器(步進驅動電源)向電動機繞組提供脈沖電流,步進電動機的運行性能決定于電動機與步進驅動器的良好配合。
電機的響應僅由數字輸入脈沖確定,因而可以采用開環控制,這使得電機的結構可以比較簡單而且控制成本。
二、 步進電機基本原理
步進電機是一種用電脈沖進行控制,將電脈沖(數字信號)轉化為角位移的執行機構。
通常步進電機的轉子為永磁體,當電流流過定子繞組時,定子繞組產生一矢量磁場。
該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度,轉子也隨著該磁場轉一個角度。
當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度 (稱為"步距角"),它的旋轉是以固定的角度一步一步運行的。

步進電機輸出的角位移與輸入的脈沖數成正比,轉速與脈沖頻率成正比,改變繞組通電的順序,電機就會反轉。因此:
可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;
可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的;
可以通過控制繞組通電順序,達到控制電機正反轉的目的。
三、步進電機的主要參數與技術指標
步進電機主要參數包括:額定電壓、額定電流、相數、步距角、步距角誤差、最大靜轉矩、空載起動頻率、最高運行頻率等。
3.1 相數
是指電機內部的線圈組數,目前常用的有兩相、三相、五相步進電機。
3.2 拍數
完成一個磁場周期性變化縮需脈沖數或導電狀態,用m表示,或指電機轉過一個齒距角所需脈沖數。
3.3 保持轉矩
是指步進電機通電但沒有轉動時,定子鎖住轉子的力矩。
(注:通常步進電機在低速時的力矩接近保持轉矩。人們常說的2N·M的步進電機,在沒有特殊說明的情況下是指保持轉矩為2N·M的步進電機)
3.4 定位轉矩
電機在不通電狀態下,電機轉子自身的鎖定力矩。
3.5 步距角
對應一個脈沖信號,電機轉子轉過的角位移。
3.6 失步
電機運轉時運轉的步數,不等與理論上的步數。
3.7 失調角
轉子齒軸線偏移定子齒軸線的角度,電機運轉必存在失調角,由失調角產生的誤差,采用細分驅動是不能解決的。
3.8 運行矩頻特性
電機在某種測試條件下測得運行中輸出力矩與頻率關系的曲線。
四、步進驅動器原理
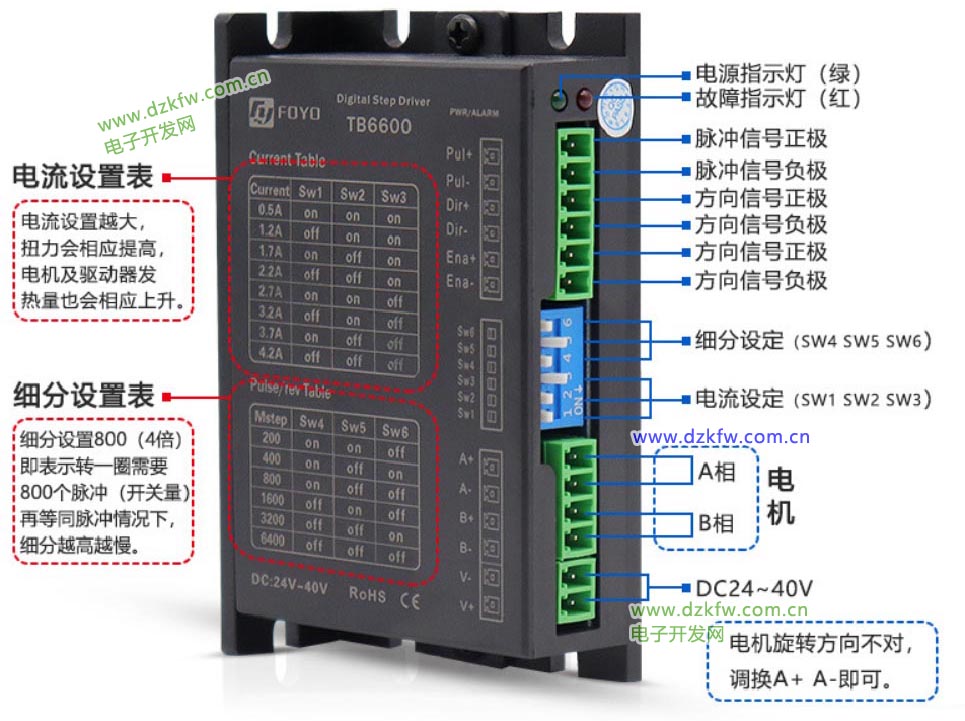
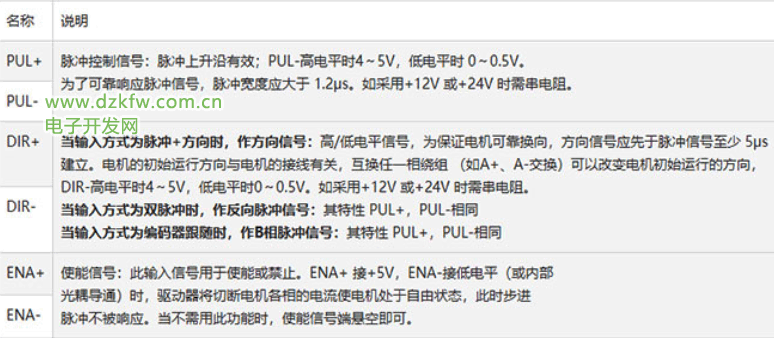
3.1 控制信號接口
3.2 功率接口

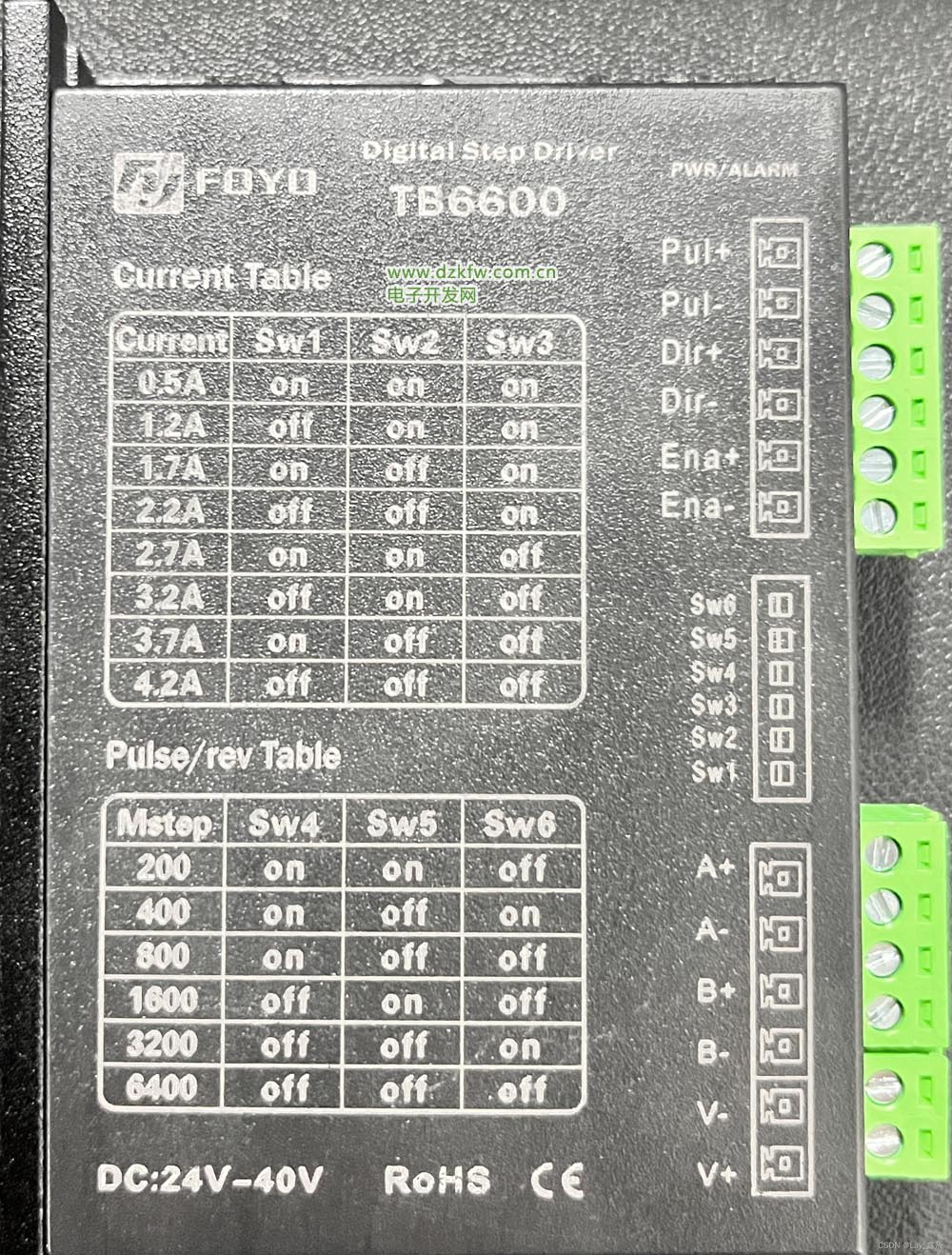
3.3 撥碼含義
3.4 狀態指示
綠色 LED 為電源指示燈,當驅動器接通電源時,該 LED 常亮;
當驅動器切斷電源時,該LED 熄滅。紅色 LED 為故障指示燈,當出現故障時,該指示燈根據故障類型,以0.2秒循環閃爍設定的次數,然后以1秒間隔繼續重復以0.2秒循環閃爍設定的次數。
直到故障被用戶清除,紅色 LED常滅。故障類型對應的閃爍次數如下表:

3.5 兩相步進電機區分相序的方法
方法一
兩相四線都沒有短接時,旋轉步進電機的軸,此時轉軸應該比較容易轉動。
將任意兩根線短接,然后旋轉步進電機的軸,此時若比較困難轉動,則說明該兩根線為同相序。否則為不同相序。
方法二
將萬用表打到電阻檔,任意兩根線接到萬用表紅黑兩端,若此時電阻較小時,則說明該兩線為同相;若電阻無窮大時,則說明該兩線為非同相。
3.6 控制信號與步進驅動器接線方法
日系PLC(歐姆龍、倍福等)輸出Q點是低電平,因此接步進驅動器的PUL-/DIR-,步進驅動器的PUL+/DIR+共陽極,接24V。
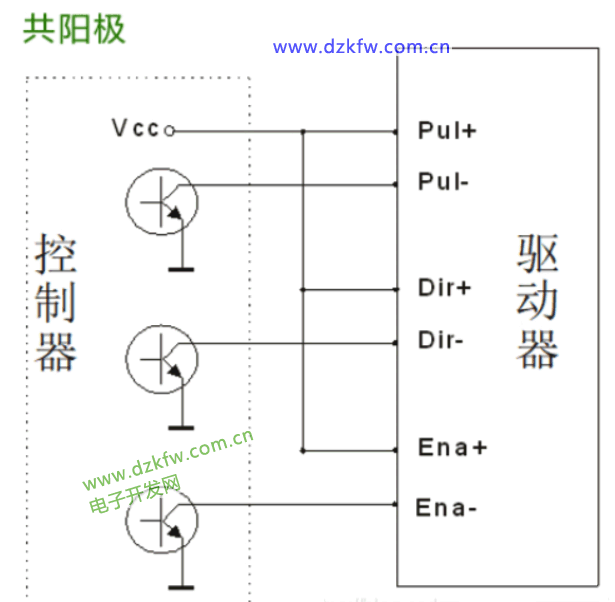
歐系PLC(西門子等)輸出Q點是高電平,因此接步進驅動器的PUL+/DIR+,步進驅動器的PUL-/DIR-共陰極,接0V。
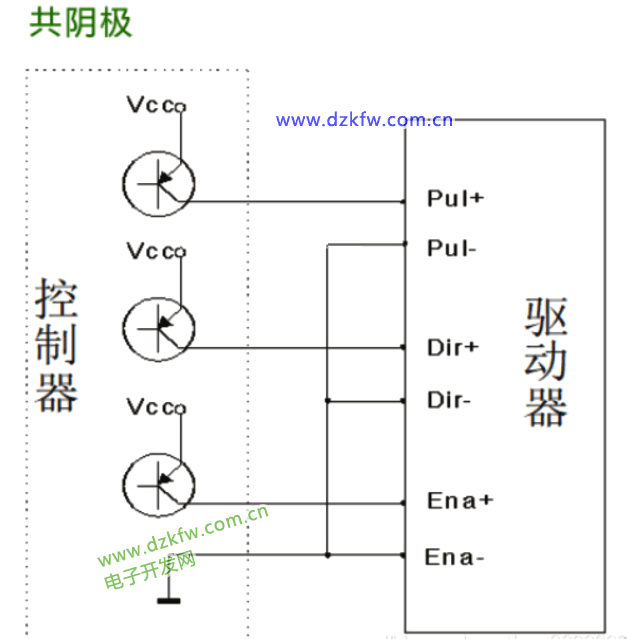
Ena+/Ena-為脫機信號
打開脫機功能后,電機轉子處于自由不鎖定狀態,可以輕松轉動,此時輸入脈沖信號不響應,
關閉此信號后電機接受脈沖信號正常運轉。
注:一般在實際應用中可不接。
五、關于步進電機相數、細分、步距角
混合式步進電機結合了永磁式步進電機和反應式步進電機的優點。
目前常用的有二相步進電機、三相步進電機、五相步進電機:兩相步進電機步進角一般為1.8度和0.9度,三相步進電機步距角為1.2度,五相步進電機步進角一般為 0.72度。
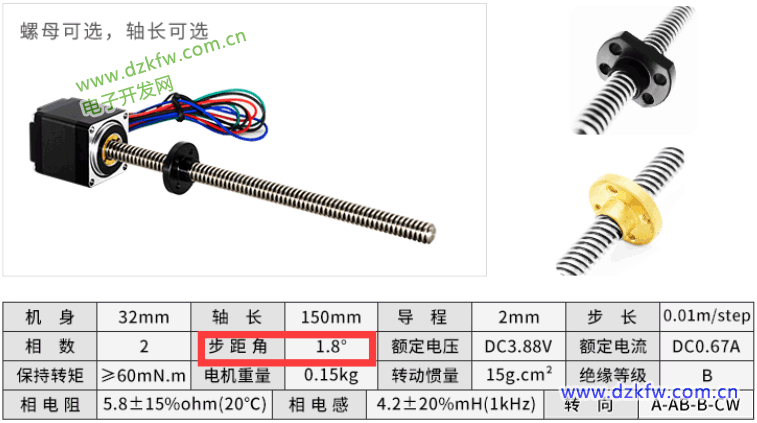
5.1 步進電機固有步距角
它表示控制系統每發一個步進脈沖信號,步進電機所轉動的角度。
步進電機出廠時給出了一個步距角的值,如上圖電機給出的值為步距角是1.8°(表示半步工作時為0.9°、整步工作時為1.8°),這個步距角可以稱之為“步進電機固有步距角”,它不一定是電機實際工作時的真正“步距角“,真正的“步距角“和步進電機驅動器細分有關。
5.2 步進電機的相數
是指步進電機內部的線圈組數,目前常用的有二相、三相、五相步進電機。
相數不同,其步距角也不同,一般二相步進電機的步距角為0.9°/1.8°、三相步進電機的為1.2°、五相步進電機的為0.72° 。
在沒有細分驅動器時,用戶主要靠選擇不同相數的步進電機來滿足自己對步距角的要求。
如果使用步進電機細分驅動器,則“相數“將變得沒有意義,用戶只需在步進電機驅動器上改變細分數,就可以改變脈沖當量。即指的是一個脈沖電機轉動的角度。
5.3 步進電機細分數
細分是驅動器將上位機發出的每個脈沖按驅動器設定的細分倍數后對電機進行控制。
簡單的說,就是在電機的步距角按照細分倍率進行縮小。
比如1.8°步距角的步進電機,驅動器細分設置為32,則脈沖當量1.8°/32=0.05625°。
或者也可以理解為每轉一圈為200個脈沖,細分為32倍,那么步進電機驅動器需要輸出200*32=6400個脈沖步進電機才轉一圈。
通常細分有2、4、8、16、32、64、128、256、普通場景應用下建議細設置在10000左右即可,細分主要是改善電機的運行性能,使步進電機運行更平穩,噪音更小。
舉例說明:
兩相步進電機的基本步距角是1.8°,即一個脈沖走1.8°,如果沒有細分,則是200個脈沖走一圈360°。
細分是通過驅動器靠精確控制電機的相電流所產生的,與電機無關。如果是10細分,則發一個脈沖電機走0.18°,即2000個脈沖走一圈360°,電機的精度能否達到或接近0.18°,還取決于細分驅動器的細分電流控制精度等其它因素。
不同廠家的細分驅動器精度可能差別很大;細分數越大精度越難控制。以次類推。
三相步進電機的基本步距角是1.2°,即一個脈沖走1.2°,如果沒有細分,則是300個脈沖走一圈360°,如果是10細分,則發一個脈沖,電機走0.12°,即3000個脈沖走一圈360°,以次類推。
5.4 保持轉矩
是指步進電機通電但沒有轉動時,定子鎖住轉子的力矩。它是步進電機最重要的參數之一,通常步進電機在低速時的力矩接近保持轉矩。
由于步進電機的輸出力矩隨速度的增大而不斷衰減,輸出功率也隨速度的增大而變化,所以保持轉矩就成為了衡量步進電機最重要的參數之一。
比如,當人們說1N.m的步進電機,在沒有特殊說明的情況下是指保持轉矩為1N.m的步進電機。
1010
六、 常見問題及解答
1、問:初次使用該步進驅動器,如何能盡快上手?
答:正確接好電源和電機后,只接脈沖信號PUL(先將頻率設置為1K以內),細分設置為16,方向和脫機懸空,此時加電后電機默認正轉。運行無誤后再依次測試加速(提高頻率)、方向、細分和脫機等功能。
2、問:控制信號高于5V,一定要加串聯電阻嗎?
答:是的,否則有可能燒毀驅動器控制接口的電路。
3、問:接線后電源指示燈亮,但電機不轉,是什么原因?
答:如果接線正確,但仍然不轉,說明控制部分驅動能力不夠,這種情況多出現在用單片機的io口直接控制方式。請確保控制接口有5mA的驅動能力。
4、問:如何判斷步進電機四條線的定義?
答:將電機的任意兩條線接在一起,此時用手擰電機轉子有阻力,則這兩條線是同一相,可接在驅動器A+、A-;另外兩條線短接仍然有阻力,則將這兩條線接在B+和B-。
5、問:電機的正反轉情況與應實際達到的相反?
答:只需要把電機其中一相的兩根線互換接入即可。
1.電機旋轉電流吱吱聲音過大 PWM頻率過低 改變方法提高頻率或者減少細分數
2.驅動器自動斷電時 設置電流過大,應該降低設置電流
3.電流設置會影響轉速
4.電機過燙,設置的電流過大,應該降低設置電流
5.ENA-和ENA+不接,這是脫機信號控制
6.PWM輸出都采用開漏輸出,需要外接上拉5V,不然沒有PWM輸出
7.當選擇電機轉速較慢時,應該選擇更多的細分數
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底