
說明:如果SR的S輸入端的信號狀態為“1”,R輸入端的信號狀態為“0”,則置位SR(復位優先型SR雙穩態觸發器)。否則,如果S輸入端的信號狀態為“0”,R輸入端的信號狀態為“1”,則復位觸發器。如果兩個輸入端的RLO均為“1”,則指令的執行順序是最重要的。SR觸發器先在指定<地址>執行置位指令,然后執行復位指令,以使該地址在執行余下的程序掃描過程中保持復位狀態。只有在RLO為“1”時,才會執行S(置位)和R(復位)指令。這些指令不受RLO“0”的影響,指令中指定的地址保持不變。
MCR (主控繼電器)依存關系
只有將SR觸發器置于激活的MCR區內時,才會激活MCR依存關系。在激活的MCR區內,如果MCR處于接通狀態,則按以上所述將尋址位置位為“1”或復位為“0”。如果MCR處于關閉狀態,則無論輸入狀態如何,指定地址的當前狀態均保持不變。
狀態字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | X | X | X | 1 |
實例:
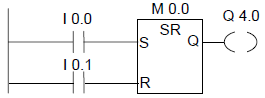
如果輸入端I0.0的信號狀態為“1”,I0.1的信號狀態為“0”,則置位存儲器位M0.0,輸出Q4.0將是“1”。否則,如果輸入端I0.0的信號狀態為“0”,I0.1的信號狀態為“1”,則復位存儲器位M0.0,輸出Q4.0將是“0”。如果兩個信號狀態均為“0”,則不會發生任何變化。如果兩個信號狀態均為“1”,將因順序關系執行復位指令;復位M0.0,Q4.0將是“0”。
如果實例在激活的MCR區之內:
MCR處于打開狀態時,將按以上所述置位或復位Q4.0;MCR處于關閉狀態時,無論輸入狀態如何,Q4.0均保持不變。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底