
1、你要知道步進馬達的工作原理。
控制方式是脈沖控制,而不是電平控制;
控制信號一般為低電平信號,而不是高電平;
度量單位,也就是如何衡量步進馬達行走的距離---步進角,就是一個脈沖馬達轉動的角度。步進馬達的步進角一般為1.8°。0.9°,0.72°,0.36°,0.0288°,等等。步進角越小,則步進馬達的控制精度越高。我們根據步進角可以控制馬達行走的精確距離。比如說,步進角0.72°,馬達旋轉一周需要的脈沖數為360/0.72=500脈沖,也就是對步進馬達驅動器發出500個脈沖信號,馬達才旋轉一周。
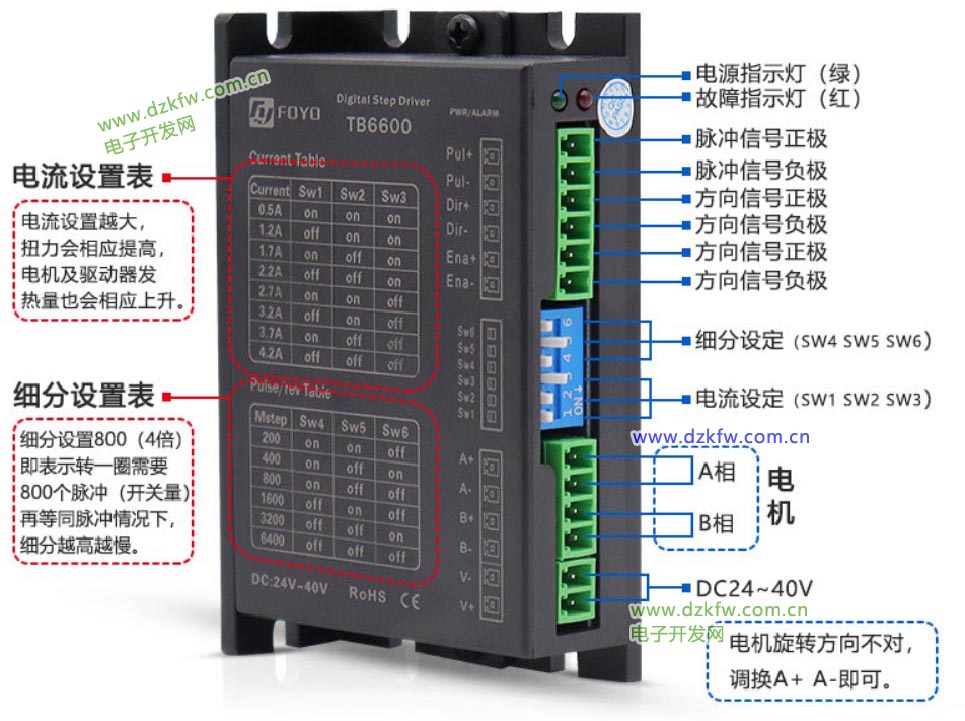
步進驅動器TB6600說明
所以,根據以上步進馬達的工作原理,你需要選擇合適的PLC。你用FX2N的PLC,需要制定為MT晶體管型,MR為繼電器型,不可以發高速脈沖,所以必須用MT型。
2、至于接線圖,你要知道FX2N的PLC最多發兩路脈沖,脈沖口為Y0和Y1,頻率為20KHZ。
附圖如下:
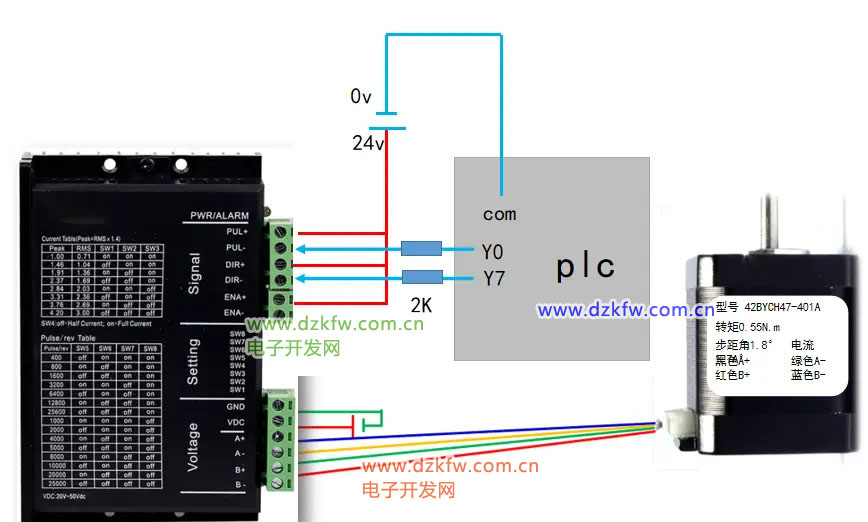
三菱plc控制步進電機,三菱plc通過步進驅動器控制步進電機
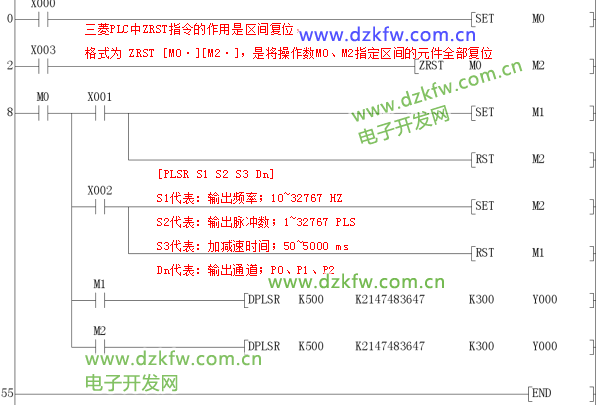
3、至于程序的話,看你的要求,是自動正反轉還是手動控制正反轉。應用PLSY指令控制步進速度和行走距離。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底