
plc和fx2n-4ad-tc實(shí)現(xiàn)pid閉環(huán)控制系統(tǒng)的學(xué)習(xí)
風(fēng)機(jī)鼓入的新風(fēng)經(jīng)加熱交換器、制冷交換器、進(jìn)入房間。原理說明:進(jìn)風(fēng)不斷被受熱體加溫,欲使進(jìn)風(fēng)維持一定的溫度,這就需要同時(shí)有一加熱器以不同加熱量給進(jìn)風(fēng)加熱,這樣才能保證進(jìn)風(fēng)溫度保持恒定。
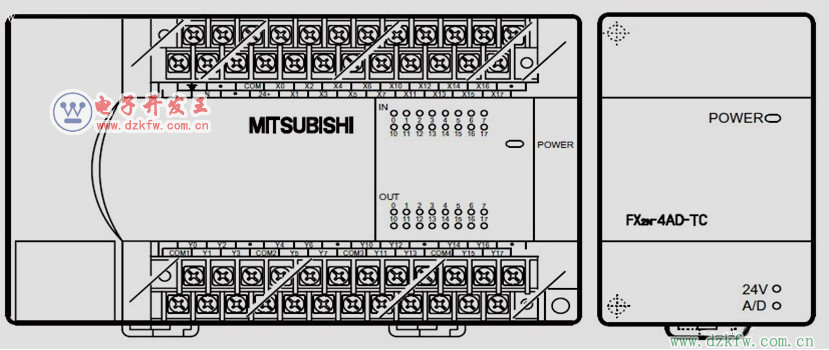
PLC接線圖如下,按圖接好線。配線時(shí),應(yīng)使用帶屏蔽的補(bǔ)償導(dǎo)線和模擬輸入電纜配合,屏蔽一切可能產(chǎn)生的干擾。FX2N-4AD-TC的特殊功能模塊編號(hào)為0。
輸入和輸出點(diǎn)分配表
這里介紹PID控制改變加熱器(熱盤管)的加熱時(shí)間從而實(shí)現(xiàn)對(duì)溫度的閉環(huán)控制。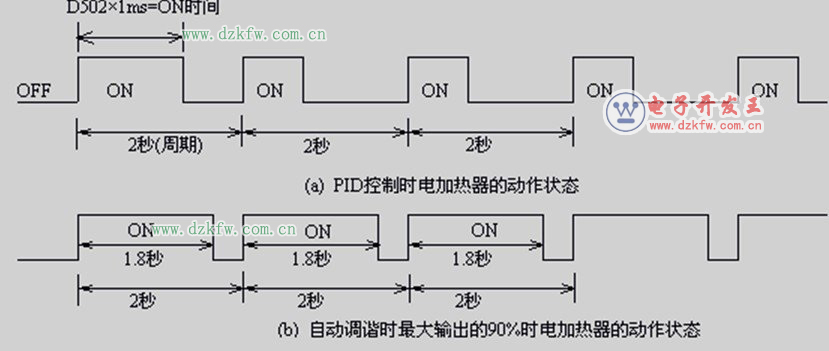
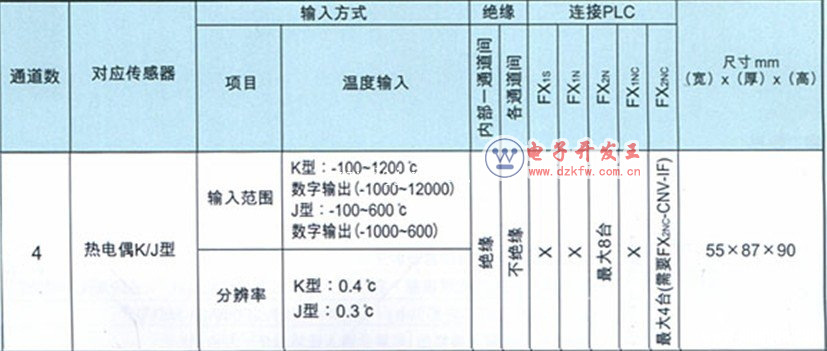
在溫度控制系統(tǒng)中,電加熱器加熱,溫度用熱電耦檢測(cè),與熱電耦型溫度傳感器匹配的模擬量輸入模塊 FX2N-4AD-TC將溫度轉(zhuǎn)換為數(shù)字輸出,CPU將檢測(cè)的溫度與溫度設(shè)定值比較,通過PLC的PID控制改變加熱器的加熱時(shí)間從而實(shí)現(xiàn)對(duì)溫度的閉環(huán)控制。PID控制時(shí)和自動(dòng)調(diào)諧時(shí)電加熱器的動(dòng)作情況如上圖所示。其參數(shù)設(shè)定內(nèi)容如下表所示。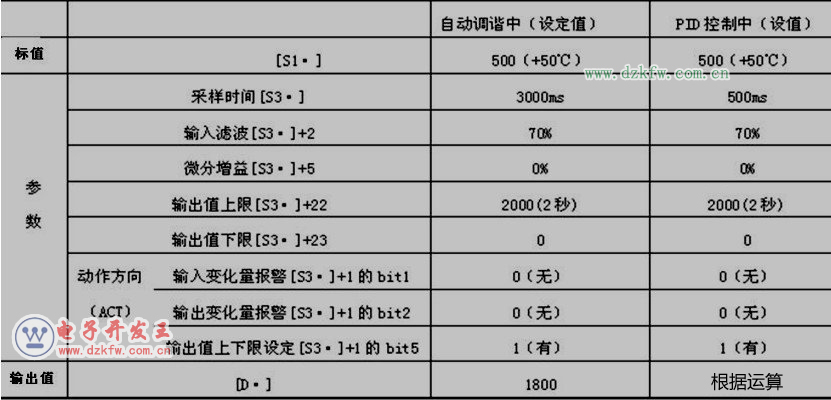
三菱PLC和FX2N-4AD-TC實(shí)現(xiàn)溫度PID閉環(huán)控制系統(tǒng)程序設(shè)計(jì):
用選擇開關(guān)置X10作為自動(dòng)調(diào)諧控制后的PID控制,用選擇開關(guān)置X11作為無自動(dòng)調(diào)諧的PID控制。
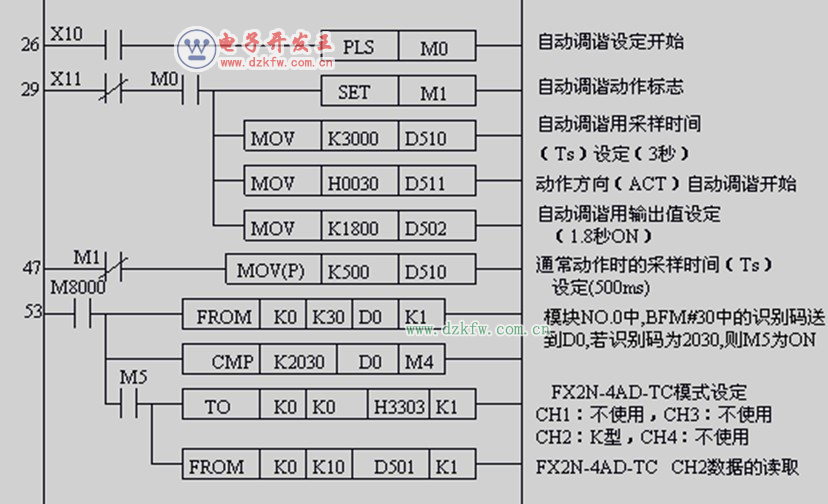
當(dāng)選擇開關(guān)置X10時(shí),控制用參數(shù)的設(shè)定值在PID運(yùn)算前必須預(yù)先通過指令寫入,見圖程序0步開始,M8002為初始化脈沖,用MOV指令將目標(biāo)值、輸入濾波常數(shù)、微分增益、輸出值上限、輸出值下限的設(shè)定值分別傳送給數(shù)據(jù)寄存器D500、D512、D515、D532、D533。
程序第26步,使M0得電,使用自動(dòng)調(diào)諧功能是為了得到最佳PID控制,自動(dòng)調(diào)諧不能自動(dòng)設(shè)定的參數(shù)必須通過指令設(shè)定,在第29步~47步之間用MOV指令將自動(dòng)調(diào)諧用的參數(shù)(自動(dòng)調(diào)諧采用時(shí)間、動(dòng)作方向自動(dòng)調(diào)諧開始、自動(dòng)調(diào)諧用輸出值)分別傳送給數(shù)據(jù)寄存器D510、D511、D502。
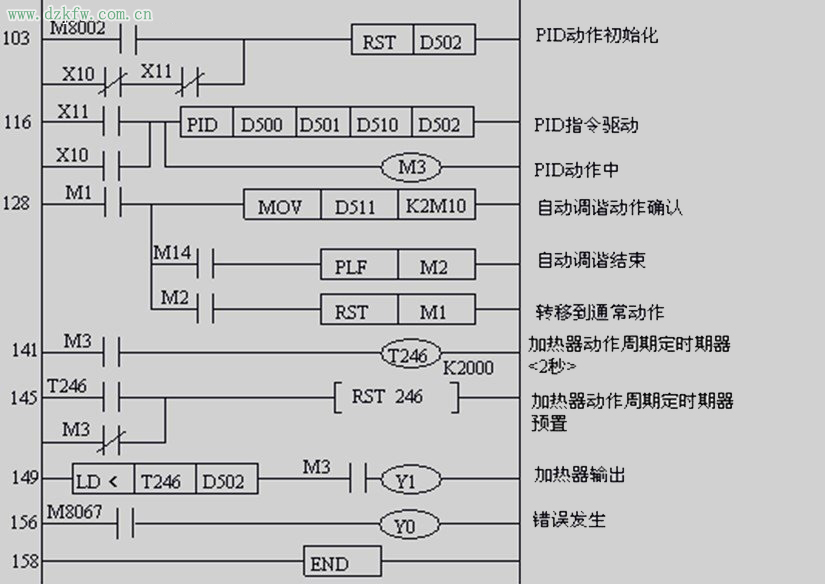
程序第53步開始,對(duì)FX2N-4AD-TC進(jìn)行確認(rèn)、模式設(shè)定,且在PLC運(yùn)行中讀取來自FX2N-4AD-TC的數(shù)據(jù)送到PLC的D501中,103步開始對(duì)PID動(dòng)作進(jìn)行初始化。
第116步開始,X10閉合,在自動(dòng)調(diào)諧后實(shí)行PID控制,當(dāng)自動(dòng)調(diào)諧開始時(shí)的測(cè)定值達(dá)到目標(biāo)值的變化量變化1/3以上,則自動(dòng)調(diào)諧結(jié)束,程序第128步~140步,自動(dòng)調(diào)諧結(jié)束,轉(zhuǎn)移到通常動(dòng)作,M1復(fù)位。
第47步,將通常動(dòng)作的采樣時(shí)間設(shè)定值500ms用脈沖執(zhí)行型MOV(P)指令送給D510,進(jìn)行PID控制。
用選擇開關(guān)置X11作為無自動(dòng)調(diào)諧的PID控制(當(dāng)選擇開關(guān)置斷開位置時(shí),將PID動(dòng)作初始化,即D502清零)。
程序116步,執(zhí)行PID指令。加熱器動(dòng)作周期T246設(shè)為2秒,當(dāng)加熱器動(dòng)作周期2秒鐘到,通過復(fù)位指令將T246清零,因?yàn)镸3動(dòng)作,T246重新計(jì)時(shí)。通過觸點(diǎn)比較指令,控制加熱器是否工作,由于PID調(diào)節(jié)獲得需要的加熱時(shí)間的數(shù)據(jù)置于D502中,D502不是固定值,靠PID來調(diào)節(jié),在PID調(diào)節(jié)過程中,M3動(dòng)合觸點(diǎn)始終是閉合的,當(dāng)加熱時(shí)間通過T246記錄的數(shù)據(jù)小于PID傳送的數(shù)據(jù)D502時(shí),加熱器加熱,否則停止加熱,等待加熱器動(dòng)作周期2秒到,T246清零并重新計(jì)時(shí),此時(shí)加熱器又加熱,周而復(fù)始。
通過PID控制不斷調(diào)節(jié)加熱器的加熱時(shí)間,從而實(shí)現(xiàn)了恒溫控制。當(dāng)控制參數(shù)的設(shè)定值或PID運(yùn)算中的數(shù)據(jù)發(fā)生錯(cuò)誤時(shí),則運(yùn)算錯(cuò)誤標(biāo)志輔助繼電器M8067變?yōu)镺N狀態(tài),通過Y0輸出給故障指示燈顯示。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底