
☆PLC梯形圖中的數學運算指令與語句表中的數學運算指令有什么區別?
西門子S7-200系列PLC中,梯形圖的數學運算指令用方框來表示,語句表中的數學運算指令用助記符表示。兩種表達方式形式不同,且助記符也可能有較大差別。
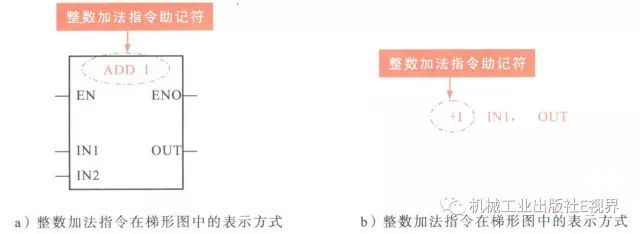
圖:數學運算指令在梯形圖和語句表中的助記符
另外,數學運算指令在梯形圖和語句表中的功能和使用方法也有所區別。在梯形圖中,整數、雙整數、實數的加法指令執行的運算為
IN1+IN2=OUT
在語句表中,加法指令執行的運算為
IN1+OUT=OUT
在梯形圖中的加法指令的結果為兩個輸入端之和;在語句表中加法指令為輸入量和輸出量之和,在設計程序時應注意這些區別。
☆兩臺PLC如何建立通信?
兩臺S7-200系列PLC建立通信,首先借助通信電纜將兩臺PLC的PORT0端口連接,通過PPI協議(點對點接口協議)實現PPI通信。
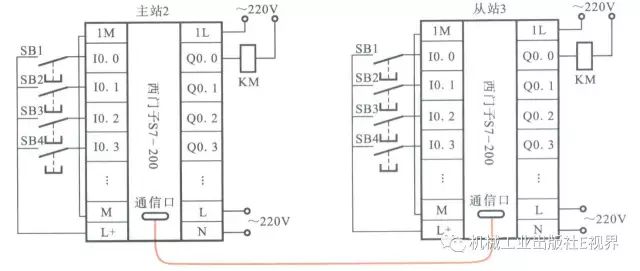
圖:兩臺S7-200系列PLC之間的連接
根據通信指令模式,首先建立PPI主站模式(設置SMB30/SMB130通信端口),根據TBL數據表(狀態字節、遠程設備地址、數據指針、數據長度等)解析通信過程。
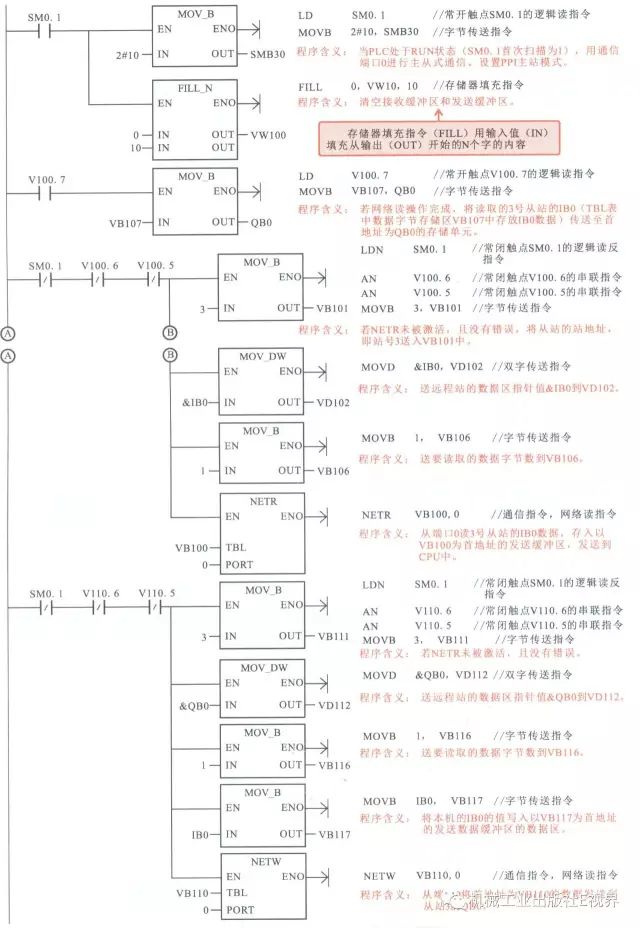
圖:兩臺S7-200系列PLC的通信程序
☆PLC中SM0.1和SM0.3的區別是什么?
西門子S7-200系列PLC中,SM0.1和SM0.3均是僅在PLC從STOP到RUN時閉合一個掃描周期。兩個特殊標志存儲器的區別在于,SM0.1在PLC通電進入RUN模式和借助模式開關將PLC從STOP模擬切換到RUN模式時均閉合一個掃描周期;SM0.3僅在PLC通電進入RUN模式時閉合一個周期。
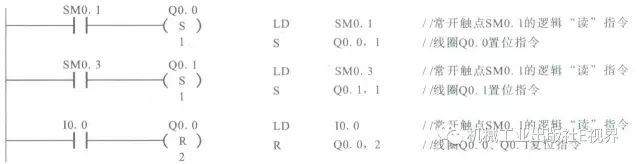
圖:西門子S7-200系列PLC中SM0.1和SM0.3的區別
上圖中,當PLC通電時,Q0.0和Q0.1均得電。若在PLC通電狀態下,用模式開關使PLC由STOP模式切換到RUN模式時,只有Q0.0得電。
☆PLC控制電動機反接制動的語句表如何編寫?
1.控制要求
2.劃分控制關系,分配PLC語句表的I/O分配表
根據反接制動控制的要求,首先將各控制功能進行分解,并按其功能劃分為起動和制動兩個模塊。
根據上述控制要求可知,輸入設備主要包括起動按鈕SB1、制動按鈕SB2,熱繼電器熱元件FR和速度繼電器觸點,因此,應有4個輸入信號。
輸出設備主要包括2個交流接觸器,即控制電動機M起動交流接觸器KM1和反接制動的交流接觸器KM2,因此,應有2個輸出信號。
將輸入設備和輸出設備的元件編號與三菱PLC語句表中的操作數(編程元件的地址編號)進行對應,填寫西門子PLC語句表的I/O分配表。

圖:電動機反接制動控制的西門子PLC語句表的I/O分配表
3.程序編寫
電動機反接制動控制模塊劃分和I/O分配表繪制完成后,便可根據各模塊的控制要求進行語句表的編寫,最后將各模塊語句表進行組合。
(1)電動機起動控制模塊語句表的編程
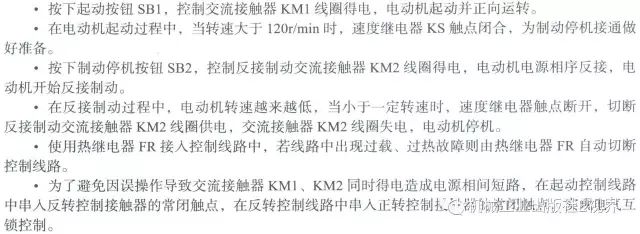
控制要求:按下起動按鈕SB1,控制交流接觸器KM1得電,電動機M起動運轉,且當松開起動按鈕SB1后,仍保持連續運轉;按下反接制動按鈕SB2,交流接觸器KM1失電,電動機失電;交流接觸器KM1、KM2不能同時得電。
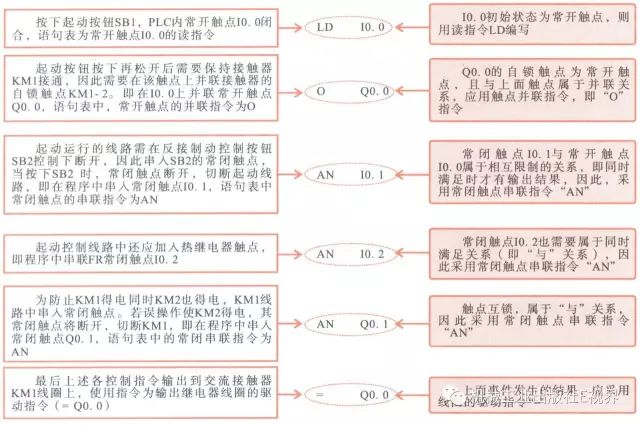
圖:電動機起動控制模塊語句表的編程
(2)電動機反接制動控制模塊語句表的編程
控制要求:按下反接制動按鈕SB2,交流接觸器KM2得電,KM1失電,且松開SB2后,仍保持KM2得電;且要求電動機達到一定轉速后,才可能實現反接制動控制。另外,交流接觸器KM1、KM2不能同時得電。
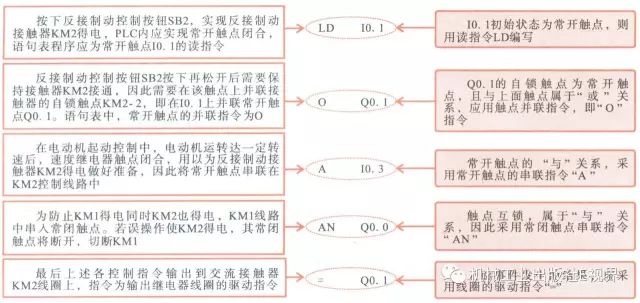
圖:電動機反接制動模塊語句表的編程
將兩個模塊的語句表組合,整理后得到電動機反接制動PLC控制的語句表程序。
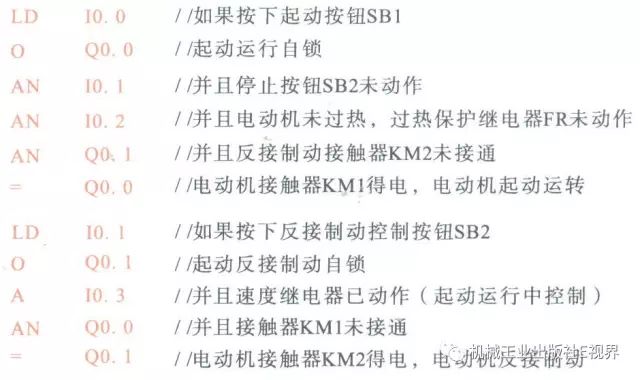
圖:最終組合得到的電動機反接制動PLC孔至的語句表程序
4.特別提示
由于直接使用指令進行語句表編程比較抽象,因此大多數情況下編寫語句表時通常與梯形圖語言配合使用,即先編寫梯形圖程序,然后按照編程指令的應用規則進行逐條轉換。
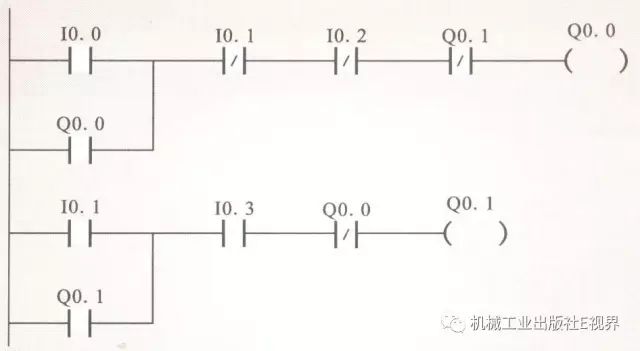
圖:電動機反接制動PLC控制的梯形圖程序
按照各編程指令的應用規則,將梯形圖直接轉換為語句表。基本原則:按照梯形圖從上到下,從左到右的順序逐一編寫。
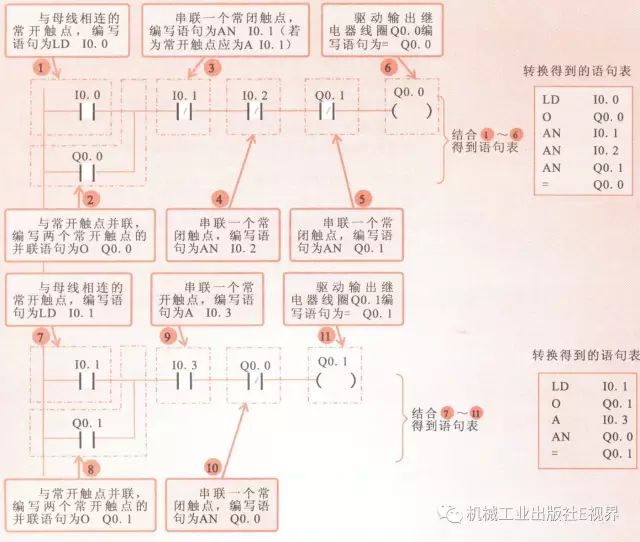
圖:西門PLC梯形圖向語句表的轉換方法
另外,大部分編程軟件中都能夠實現梯形圖和語句表的自動轉換,因此可在編程軟件中繪制好梯形圖,然后通過軟件進行“梯形圖/語句表”轉換。
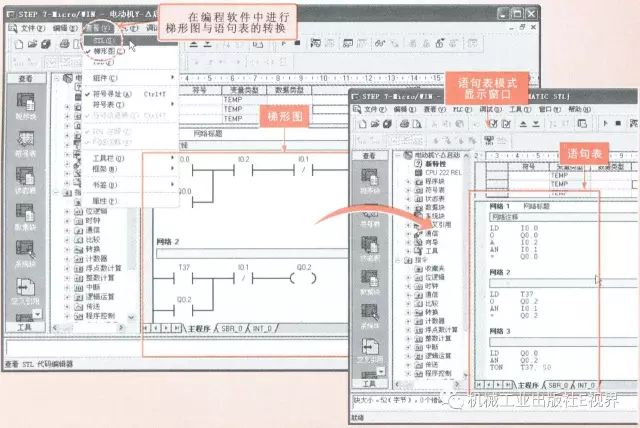
圖:使用編程軟件轉換梯形圖和語句表
值得注意的是,在編程軟件中,梯形圖和語句表之間可以相互轉換。基本所有的梯形圖都可直接轉換為對應的指令語句表;但指令語句表不一定全部可以直接轉換為對應的梯形圖,需要注意相應的格式及指令的使用。
☆PLC控制電動機連續工作的語句表如何編寫?
有上面的詳細介紹后,小編將對本段進行簡化,若有疑問可以留言提出。

圖:電動機連續控制的三菱PLC語句表I/O分配表
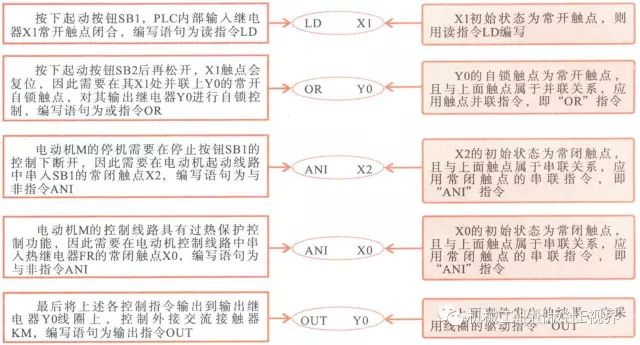
圖:電動機M起停控制模塊語句表的編程
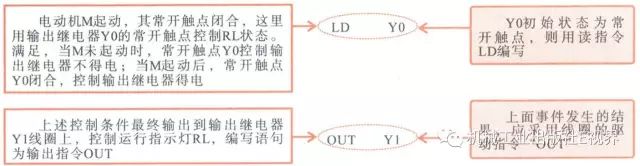
圖:運行指示燈RL控制模塊語句表的編程
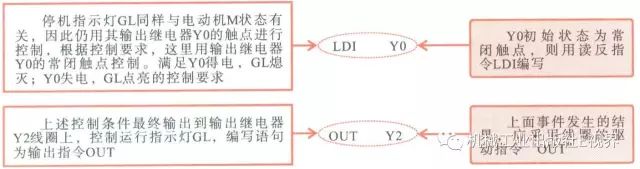
圖:停機指示燈GL控制模塊語句表的編程
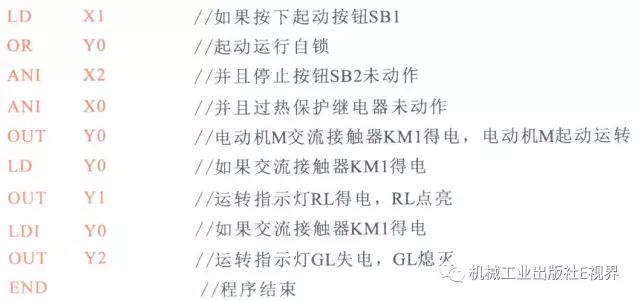
圖:組合完成的電動機連續控制語句表程序
☆PLC控制兩臺電動機順序起動的語句表如何編寫?


圖:電動機順序起動控制的三菱PLC語句表的I/O地址分配表
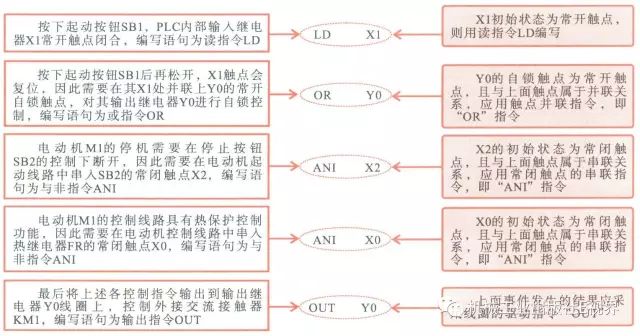
圖:電動機M1起動和停機控制模塊語句表的編程
圖:時間控制模塊語句表的編程
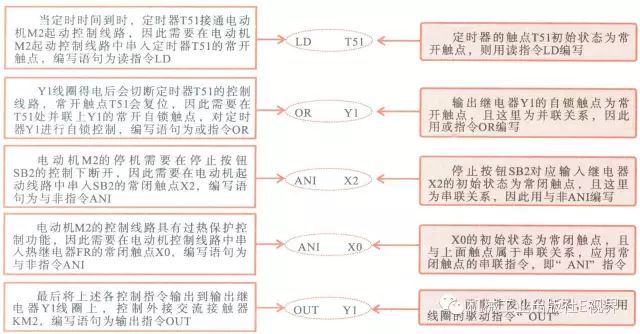
圖:電動機M2起動和停機控制模塊語句表的編程
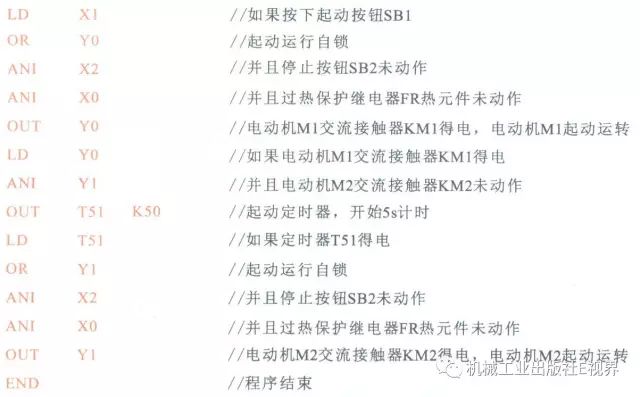
圖:組合完成的電動機順序起動控制語句表程序
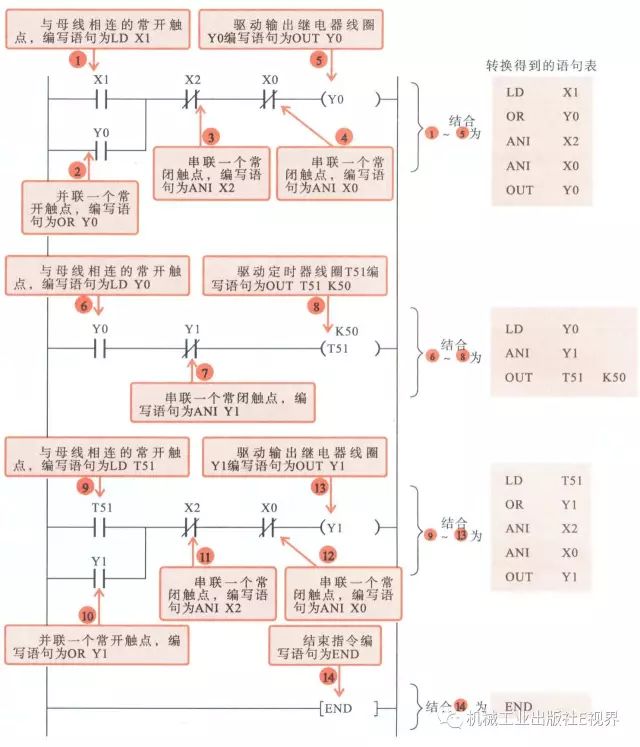
圖:電動機順序起動PLC控制的梯形圖程序與語句表程序的轉換
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底