
一、rs觸發器與sr觸發器的區別
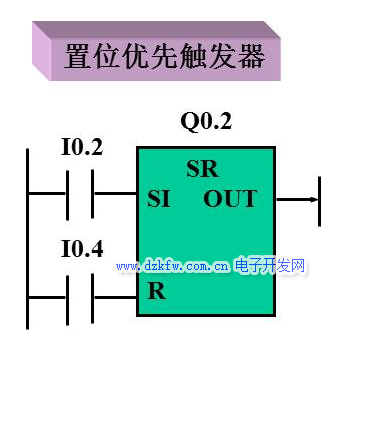
RS觸發器為“置位優先”型觸發器(當R和S驅動信號同時為“1”時,觸發器最終為置位狀態);
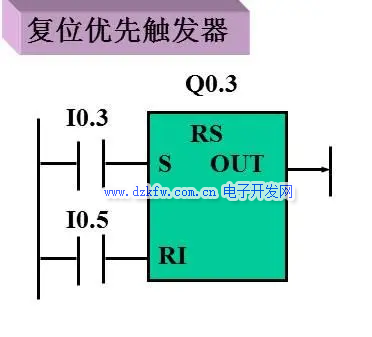
SR觸發器為“復位優先”型觸發器(當R和S驅動信號同時為“1”時,觸發器最終為復位狀態)。
RS觸發器和SR觸發器的“位地址”、置位(S)、復(S)及輸出(Q)所使用的操作數可以是:I、Q、M、L、D。
SR:如果設置(S1)和復原(R)信號均為真實,則輸出(OUT)為真實:
輸出(OUT)為真實,即為置位優先,即兩者均為1時,則置位為1(置位優先)。
RS:如果設置(S)和復原(R1)信號均為真實,則輸出(OUT)為虛假:
輸出(OUT)為虛假,即為復位優先,即兩者均為1時,則置復位位為1(復位優先)。
正確的指令圖片
時序圖
二、STEP7兩種觸發器:RS觸發器和SR觸發器的區別
SR是以置位優先來進行程序響應的;RS是復位優先來進行響應的。
在編程序梯形圖時,只要考慮動作優先級及外部的綜合條件來進行選擇用哪個即可。
在編輯STL程序時,這兩種就無需考慮了,一般是先復位,在置位就好。
三、RS觸發器與可控RS觸發器的區別
置位'S'和復位'R'信號同時為1時的優先級有區別。
RS觸發器當置位和復位信號均為1時,輸出為0,復位優先;
SR觸發器當置位和復位信號均為1時,輸出為1,置位優先。
有基本RS觸發器和同步RS觸發器。你應該說的是同步的把,有一個時鐘脈沖CP輸入端控制,R,S為信號輸入端。
四、基本RS觸發器和同步RS觸發器的差別
基本RS觸發器就如同一般的觸發器一樣遵循RS觸發器公式。
而同步RS觸發器除了要遵循一般rs觸發器公式以外還要接受一個外加的時鐘信號,能夠讓一個或者多個rs觸發器同步運行。
公式也會在原來的基礎上與一個時鐘信號的高電平(或者低電平)。
五、同步RS觸發器電路結構與工作原理
1、電路結構
如圖1所示在基本RS觸發器的基礎上增加G3、G4兩個與非門構成觸發引導電路,其輸出分別作為基本RS觸發器的R端和S端。
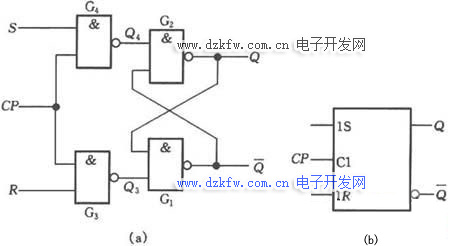
圖1 同步RS觸發器(a)電路結構(b)邏輯符號
2、工作原理
由圖1可知,G3和G4同時受CP信號控制,當CP為0時,G3和G4被封鎖, R、S不會影響觸發器的狀態;當CP為1時,G3和G4打開,將R、S端的信號傳送到基本RS觸發器的輸入端,觸發器觸發翻轉。結合基本RS觸發器的工作原理,我們可以得到以下結論。
1.當CP=0時
Q3=Q4=1,觸發器保持原來狀態不變。
2.當CP=1時
若R=0 ,S=1; Q3=1,Q4=0,觸發器置1;
若R=1 ,S=0; Q3=0,Q4=1,觸發器置0;
若R=S=0; Q3=Q4=1,觸發器狀態保持不變;
若R=S=1; Q3=Q4=0,觸發器狀態不定;
可見R端和S端都是高電平有效,所以R端和S端不能同時為1,其邏輯符號中的R端和S端也沒有小圓圈。
六、RS觸發器
基本RS 觸發器: 電路結構 把兩個與非門G1、G2的輸入、輸出端交叉連接,即可構成基本RS觸發器。它有兩個輸入端R、S和兩個輸出端Q、Q。
工作原理
基本RS觸發器的邏輯方程為: 根據上述兩個式子得到它的四種輸入與輸出的關系:
1.當R=1、S=0時,則Q=0,Q=1,觸發器置1。
2.當R=0、S=1時,則Q=1,Q=0,觸發器置0。 如上所述,當觸發器的兩個輸入端加入不同邏輯電平時,它的兩個輸出端Q和Q有兩種互補的穩定狀態。一般規定觸發器Q端的狀態作為觸發器的狀態。通常稱觸發器處于某種狀態,實際是指它的Q端的狀態。Q=1、Q=0時,稱觸發器處于1態,反之觸發器處于0態。S=0,R=1使觸發器置1,或稱置位。因置位的決定條件是S=0,故稱S 端為置1端。R=0,S=1時,使觸發器置0,或稱復位。
同理,稱R端為置0端或復位端。若觸發器原來為1態,欲使之變為0態,必須令R端的電平由1變0,S端的電平由0變1。這里所加的輸入信號(低電平)稱為觸發信號,由它們導致的轉換過程稱為翻轉。由于這里的觸發信號是電平,因此這種觸發器稱為電平控制觸發器。
從功能方面看,它只能在S和R的作用下置0和置1,所以又稱為置0置1觸發器,或稱為置位復位觸發器。其邏輯符號如圖7.2.1(b)所示。
由于置0或置1都是觸發信號低電平有效,因此,S端和R端都畫有小圓圈。
3.當R=S=1時,觸發器狀態保持不變。 觸發器保持狀態時,輸入端都加非有效電平(高電平),需要觸發翻轉時,要求在某一輸入端加一負脈沖,例如在S端加負脈沖使觸發器置1,該脈沖信號回到高電平后,觸發器仍維持1狀態不變,相當于把S端某一時刻的電平信號存儲起來,這體現了觸發器具有記憶功能。
4.當R=S=0時,觸發器狀態不確定 在此條件下,兩個與非門的輸出端Q和Q全為1,在兩個輸入信號都同時撤去(回到1)后,由于兩個與非門的延遲時間無法確定,觸發器的狀態不能確定是1還是0,因此稱這種情況為不定狀態,這種情況應當避免。從另外一個角度來說,正因為R端和S端完成置0、置1都是低電平有效,所以二者不能同時為0。
此外,還可以用或非門的輸入、輸出端交叉連接構成置0、置1觸發器。
這種觸發器的觸發信號是高電平有效,因此在邏輯符號的S端和R端沒有小圓圈。
功能描述: 狀態轉移真值表 用表格的形式描述觸發器在輸入信號作用下,觸發器的下一個穩定狀態(次態)Qn+1與觸發器的原穩定狀態(現態)Qn和輸入信號狀態之間的關系。
2.特征方程
即以邏輯函數的形式來描述次態與現態及輸入信號之間的關系。由上述狀態轉移真值表,通過卡諾圖化簡可得到。
3.狀態轉移圖
即以圖形的方式描述觸發器的狀態變化對輸入信號的要求。
圖7.2.4是基本RS觸發器的狀態轉移圖。圖中兩個圓圈代表觸發器的兩個狀態;箭頭表示在觸發器的輸入信號作用下狀態轉移的方向;箭頭旁邊由斜線“/”分開的代碼分別表示狀態轉移的條件和在此條件下產生的輸出狀態。
設觸發器的初始狀態為Q=0、Q=1,當SD的下降沿到達后,經過G1的傳輸延遲時間tpd,Q端變為高電平。這個高電平加到門G2的輸入端,再經過門G2的傳輸延遲時間tpd,使Q變為低電平。
當Q的低電平反饋到G1的輸入端以后,即使SD=0的信號消失(即SD回到高電平),觸發器被置成Q=1狀態也將保持下去。可見,為保證觸發器可靠地翻轉,必須等到Q=0的狀態反饋到G1的輸入端以后,SD=0的信號才可以取消。
因此,SD輸入的低電平信號寬度tw應滿足tw≥2tpd。同理,如果從RD端輸入置0信號,其寬度也必須大于、等于2tpd。
2.傳輸延遲時間: 從輸入信號到達起,到觸發器輸出端新狀態穩定地建立起來為止,所經過的這段時間稱為觸發器的傳輸延遲時間。
從上面的分析已經可以看出,輸出端從低電平變為高電平的傳輸延遲時間tPLH和從高電平變為低電平的傳輸延遲時間tPHL是不相等的,它們分別為: tPLH=tpd,tPHL=2tpd 若基本RS觸發器由或非門組成,則其傳輸延遲時間將為 tPHL=tpd,tPLH=2tpd 。
對基本RS 觸發器歸納為以下幾點:
1.基本RS觸發器具有置位、復位和保持(記憶)的功能;
2.基本RS觸發器的觸發信號是低電平有效,屬于電平觸發方式;
3.基本RS觸發器存在約束條件(R+S=1),由于兩個與非門的延遲時間無法確定;當R=S=0時,將導致下一狀態的不確定。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底