
西門子公司為適應小型運動控制需求,推出了一款小型高性能伺服SINAMICS V90。SINAMICS V90 伺服驅(qū)動和 SIMOTICS S-1FL6 伺服電機組成了性能優(yōu)化,易于使用的伺服驅(qū)動系統(tǒng),八種驅(qū)動類型,七種不同的電機軸高規(guī)格,功率范圍從0.05kW到7.0kW以及單相和三相的供電系統(tǒng)使其可以廣泛用于各行各業(yè)。比如:定位,傳送,收卷等設(shè)備中,同時該伺服系統(tǒng)可以與S7-1500T/S7-1500/S7-1200 進行完美配合實現(xiàn)豐富的運動控制功能。那么,今天小編同大神一起,帶你玩轉(zhuǎn)西門子V90伺服驅(qū)動器。

分為脈沖序列版本(PTI)和PROFINET版本(PN)兩種,如下圖所示:

支持以下幾種運動模式:
1) 外部脈沖位置控制模式(PTI)
2) 內(nèi)部設(shè)定值位置控制模式(IPOS)
3) 速度模式(S)
4) 轉(zhuǎn)矩模式(T)
PTI是伺服應用中最基本使用也是最頻繁的模式,今天我們一起來學習如何使用該模式。通過PLC發(fā)送高速脈沖來驅(qū)動伺服進行定位,對于伺服的調(diào)試較為簡單,繁瑣的是在PLC中編寫高速脈沖輸出程序。
首先,應該對外部硬件連接,如下圖所示。
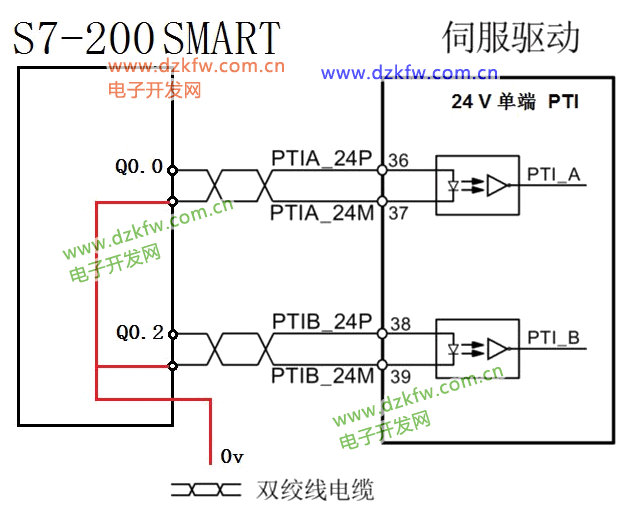
西門子plc和伺服驅(qū)動器的接線示意圖
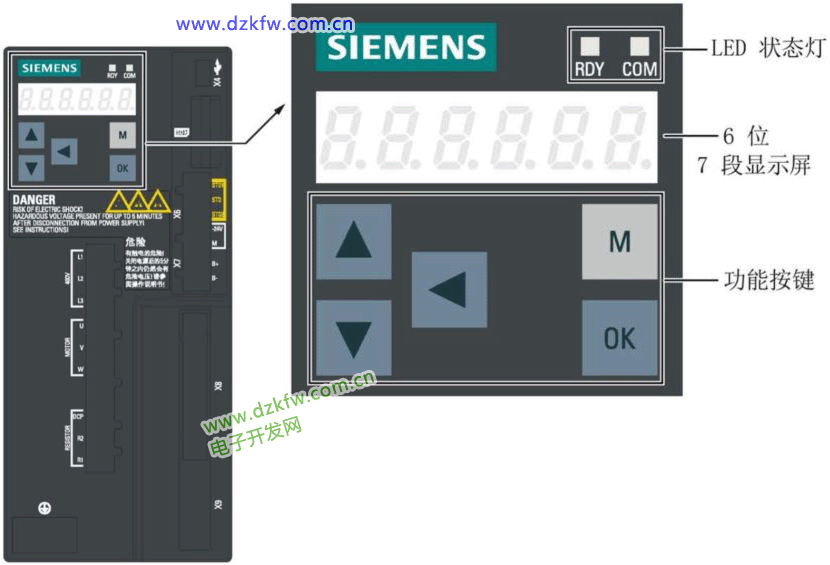
接下來開始對參數(shù)進行調(diào)試,可以通過驅(qū)動器面板和V-ASSISTANT軟件兩種方式調(diào)試參數(shù),但軟件與驅(qū)動器連接后面板則無法使用。此處簡單介紹面板設(shè)置參數(shù)的方法,面板如下圖所示。
在設(shè)置參數(shù)前最好先進行恢復出廠設(shè)置,恢復完成后斷電重啟,方法如下圖所示。
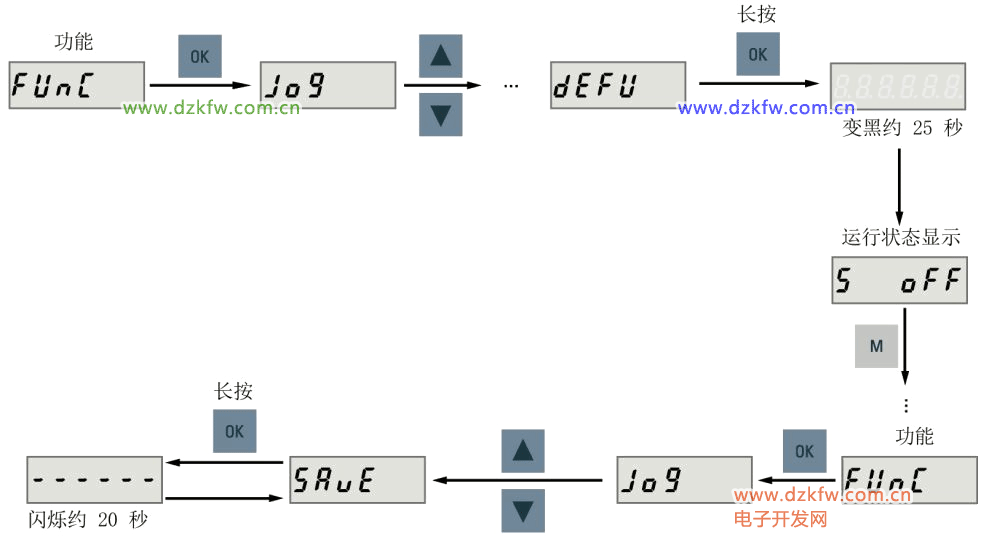
所有參數(shù)調(diào)試完成后都需要進行斷電保持設(shè)置,將修改的參數(shù)存儲到ROM保持區(qū),否則斷電后恢復缺省值,方法如下圖所示。
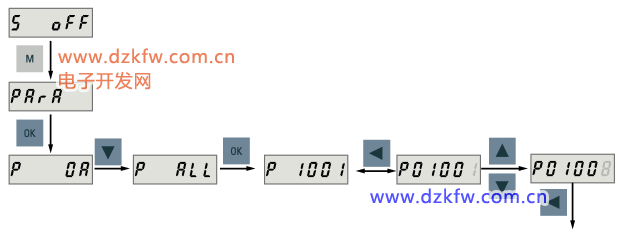
設(shè)置參數(shù)步驟如下圖所示:
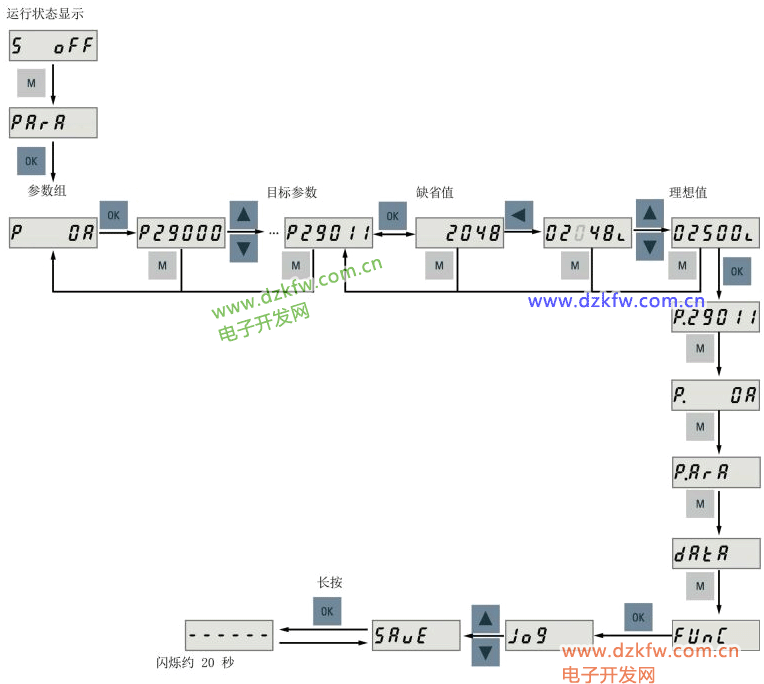
在進入?yún)?shù)設(shè)置前需要選擇正確的參數(shù)組號如P0A,0B,0C,0D等,也可選擇P ALL組,進入后通過<移位鍵來修改參數(shù)編號,如下圖所示。
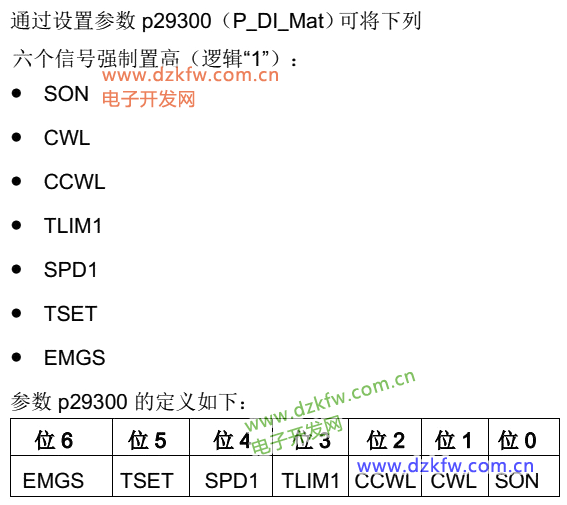
注意:初次上電驅(qū)動器未與PLC相連時,常出現(xiàn)F7491 、F7492和A52902號錯誤。原因為 順時針行程限制信號(CWL)和逆時針行程限制信號(CCWL)以及急停(EMGS) 這三個信號為OFF。默認必須為ON才可運行,如果實際使用時無需用到這三個功能,可通過把P29300的第1、2、6位設(shè)為1來強制為ON,如下圖所示。
注意:通過面板設(shè)置時要轉(zhuǎn)換成十六進制數(shù),通過軟件設(shè)置則轉(zhuǎn)換成十進制。
如未識別到伺服電機,則會發(fā)生故障 F52984。請手動輸入電機ID(p29000)進行校準,電機 ID 可參見電機銘牌。
默認運行方向為 CW(順時針)。如有必要,可通過設(shè)置參數(shù) p29001 更改運行方向。p29001=0:CW,p29001=1:CCW
下面我們來看一下外部脈沖位置模式的調(diào)試步驟:
1、斷開主電源;
2、將伺服驅(qū)動斷電,并使用信號電纜將其連接至控制器(例如,SIMATIC S7-200 SMART)。為確保正常運行,數(shù)字量信號 CWL、CCWL 和EMGS 必須保持在高電平(1);
3、打開 DC 24 V 電源;
4、檢查伺服電機類型;
· 如果伺服電機帶有增量編碼器,請輸入電機ID(p29000)-46
· 如果伺服電機帶有絕對編碼器,伺服驅(qū)動可以自動識別伺服電機。
5、設(shè)置P29003=0脈沖位置控制模式(必須在使能關(guān)閉狀態(tài)修改,默認p29003=0);
6、保存參數(shù)并重啟伺服驅(qū)動以應用外部脈沖位置控制模式的設(shè)定;
7、設(shè)置參數(shù) p29010 選擇設(shè)定值脈沖信號形式。 · p29010=0:脈沖+方向,正邏輯;
8、設(shè)置參數(shù) p29014 選擇脈沖輸入通道。p29014=1:24 V 單端脈沖輸入;
24 V 單端脈沖輸入為出廠設(shè)置。
9、設(shè)置電子齒輪比。通過參數(shù) p29012 和 p29013 來設(shè)置電子齒輪比。
p29012:電子齒輪比分子。共有四個分子(p29012[0] 至p29012[3])。
p29013:電子齒輪比分母。 也可通過p29011: 每轉(zhuǎn)設(shè)定值脈沖數(shù)。
10、設(shè)置扭矩限值和轉(zhuǎn)速限值。內(nèi)部設(shè)定值: p29043;
11、通過設(shè)置下列參數(shù)來配置必要的數(shù)字量輸入DI信號:
出廠設(shè)置如下:(外部脈沖位置模式DI信號使用較少)
· p29301[0]: 1 (SON) · p29302[0]: 2 (RESET)
· p29303[0]: 3 (CWL) · p29304[0]: 4 (CCWL)
· p29305[0]: 5 (G-CHANGE) · p29306[0]: 6 (P-TRG)
· p29307[0]: 7 (CLR) · p99308[0]: 10 (TLIM1)
12、 檢查編碼器類型。如使用絕對編碼器,必須通過 BOP 菜單功能“ABS”調(diào)整絕對編碼器;
13、設(shè)置編碼器脈沖輸出;
14、通過 BOP 保存參數(shù);
15、打開主電源;
16、清除故障和報警;
17、將信號 SON 置為高電平,通過指令設(shè)備輸入外部脈沖,伺服電機開始運行。如果不使用外部使能,可將P29300的第0位設(shè)置為1使能強制為ON。
在上述步驟中,設(shè)置電子齒輪比較為繁瑣,下面介紹一下電子齒輪比的設(shè)置方法。
電子齒輪比=反饋回來的脈沖數(shù)/發(fā)送過去的脈沖數(shù)
為什么要設(shè)置電子齒輪比,設(shè)置了齒輪比有什么作用?
一、是調(diào)整電機旋轉(zhuǎn)1圈所需要的指令脈沖數(shù),以保證電機轉(zhuǎn)速能夠達到需求轉(zhuǎn)速。
例如上位機PLC最大發(fā)送脈沖頻率為100KHz,若不修改電子齒輪比, 則電機旋轉(zhuǎn)1圈需要10000個脈沖,那么電機最高轉(zhuǎn)速為600rpm,若將電子齒輪比設(shè)為2:1,或者將每轉(zhuǎn)脈沖數(shù)設(shè)定為5000,則此時電機可以達到1200rpm轉(zhuǎn)速。
二、 避免脈沖數(shù)產(chǎn)生小數(shù),取整后影響定位精度
根據(jù)第一種方法算出電子齒輪比,雖然速度滿足了,還應考慮脈沖當量是否能滿足精度要求,還要根據(jù)機械傳動比測算一下脈沖當量,若無法滿足可適當減小轉(zhuǎn)速以達到精度要求。如果系統(tǒng)對精度要求很高需要較小的脈沖當量,則應根據(jù)脈沖當量運算,運算方法如下圖所示。
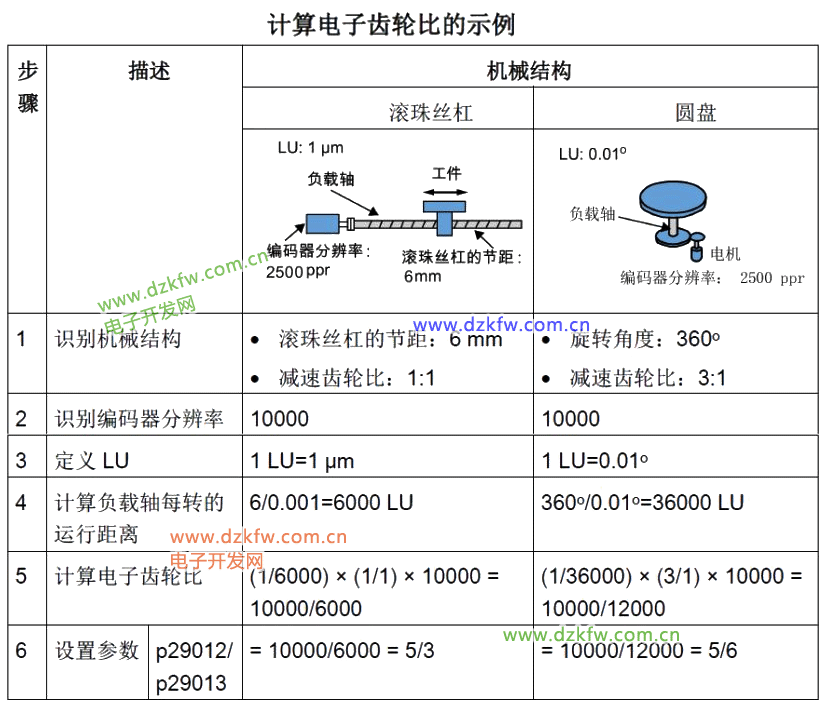
總結(jié):設(shè)定電子齒輪比肯定會降低伺服的分辨率影響精度,但合理的設(shè)置避免脈沖產(chǎn)生小數(shù)卻能提高精度。且在誤差允許范圍內(nèi)適當調(diào)整電子齒輪比可以提高電機轉(zhuǎn)速,所以在設(shè)定電子齒輪比并不能一味的按照公式推算,應當權(quán)衡精度和速度的要求,使系統(tǒng)性能發(fā)揮到最佳。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底