
步進(jìn)電機(jī)是怎樣工作的?它有哪些特點(diǎn)?
在本節(jié)中,我們將學(xué)習(xí)如下一些內(nèi)容:
1)什么是步進(jìn)電機(jī);
2)與步進(jìn)電機(jī)相關(guān)的一些基本概念;
3)步進(jìn)電機(jī)的分類與結(jié)構(gòu);
4)步進(jìn)電機(jī)的特點(diǎn);
1.1、什么是步進(jìn)電機(jī)
步進(jìn)電機(jī)是一種基于電磁感應(yīng)原理、把電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的開(kāi)環(huán)控制電機(jī),是工業(yè)控制系統(tǒng)中一種常見(jiàn)的執(zhí)行機(jī)構(gòu)(注:工業(yè)控制系統(tǒng)由控制器、控制元件、傳感器及執(zhí)行機(jī)構(gòu)組成)。
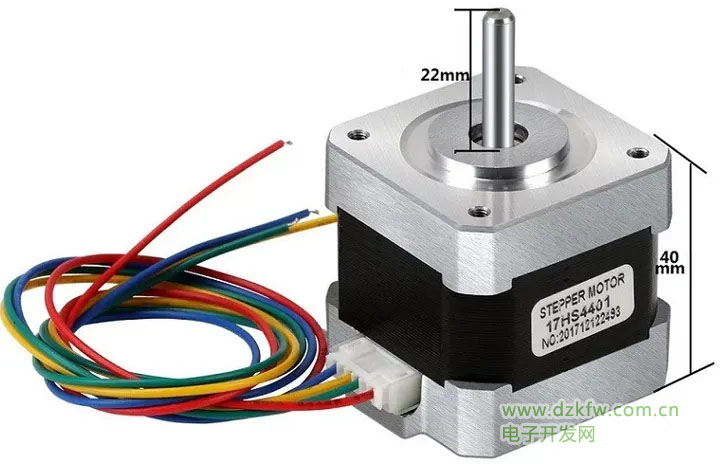
步進(jìn)電機(jī)的內(nèi)部由轉(zhuǎn)子和定子組成,下面這張圖是一個(gè)兩相步進(jìn)電機(jī)的外觀圖:
1.2、步進(jìn)電機(jī)相關(guān)的基本概念
1.2.1、相數(shù):是指步進(jìn)電機(jī)定子繞組的組數(shù)(即內(nèi)部線圈的個(gè)數(shù))。常見(jiàn)的有兩相、三相、四相、五相步進(jìn)電機(jī);
1.2.2、步距角:步進(jìn)電機(jī)接收一個(gè)脈沖信號(hào)后所轉(zhuǎn)過(guò)的角度,步距角在電機(jī)出廠時(shí)已經(jīng)確定,會(huì)寫(xiě)在電機(jī)上。一般兩相電機(jī)的步距角為0.9°/1.8°、三相電機(jī)的步距角為0.75°/1.5°,五相電機(jī)的步距角為0.36°/0.72°;如果不使用細(xì)分驅(qū)動(dòng)器,只能靠選擇不同步距角的步進(jìn)電機(jī)來(lái)滿足控制要求。細(xì)分驅(qū)動(dòng)器可以改變步進(jìn)電機(jī)的步距角,這個(gè)我們將在第二節(jié)《認(rèn)識(shí)步進(jìn)驅(qū)動(dòng)器》中介紹;
1.2.3 、保持轉(zhuǎn)矩(holding torque):是指步進(jìn)電機(jī)繞組通電且轉(zhuǎn)子沒(méi)有轉(zhuǎn)動(dòng)時(shí),使電機(jī)能夠移動(dòng)完整的一步所需要的扭矩。保持轉(zhuǎn)矩主要受電機(jī)繞組所允許的最大電流限制,通常大于運(yùn)行轉(zhuǎn)矩(running torque)。保持轉(zhuǎn)矩是步進(jìn)電機(jī)最重要的參數(shù)之一,它的優(yōu)點(diǎn)在于可以使負(fù)載保持在某個(gè)位置。在不特別指明的情況下,通常說(shuō)的步進(jìn)電機(jī)的轉(zhuǎn)矩就是指保持轉(zhuǎn)矩。比如,某步進(jìn)電機(jī)的轉(zhuǎn)矩為3.5NM,就是指其保持扭矩為3.5NM;
1.2.4、阻尼轉(zhuǎn)矩(detent torque):是指步進(jìn)電機(jī)繞組在不通電的情況下,由其本身的機(jī)械特性(永磁性結(jié)構(gòu))所產(chǎn)生的轉(zhuǎn)矩。在不通電的情況下,用手去轉(zhuǎn)動(dòng)轉(zhuǎn)子可以感受到阻尼轉(zhuǎn)矩;
1.3、步進(jìn)電機(jī)的分類與結(jié)構(gòu)
步進(jìn)電機(jī)的內(nèi)部由轉(zhuǎn)子(rotor)和定子(stator)組成。
當(dāng)定子線圈通電時(shí),會(huì)產(chǎn)生感應(yīng)磁場(chǎng),感應(yīng)磁場(chǎng)與轉(zhuǎn)子相互作用使轉(zhuǎn)子轉(zhuǎn)過(guò)一定的角度。
根據(jù)勵(lì)磁方式的不同,步進(jìn)電機(jī)可分為:永磁式、反應(yīng)式(磁阻式)和混合式三種。
1.3.1、永磁式(permanent magnet stepper motor)
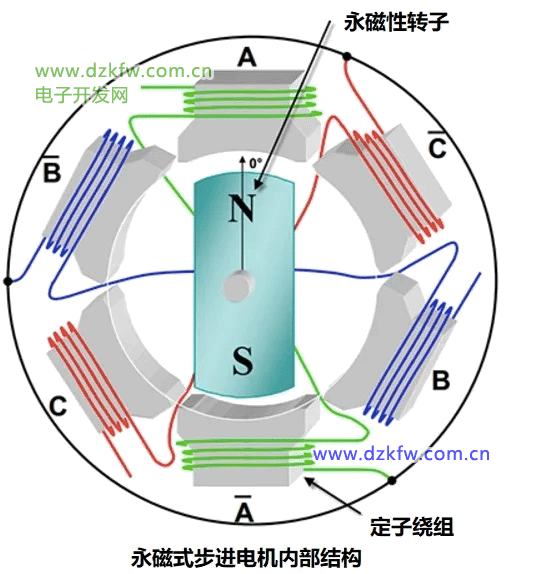
永磁式步進(jìn)電機(jī)的轉(zhuǎn)子(rotor)是一種永磁性的、柱狀結(jié)構(gòu),具有N極和S極;定子是具有對(duì)稱結(jié)構(gòu)的勵(lì)磁線圈;當(dāng)定子線圈通入直流電后,根據(jù)安培右手定律,線圈的兩端會(huì)產(chǎn)生磁場(chǎng);定子產(chǎn)生的磁場(chǎng)與轉(zhuǎn)子的永磁性材料相互作用從而使轉(zhuǎn)子轉(zhuǎn)動(dòng)。通過(guò)給定子繞組交替通電,就能控制轉(zhuǎn)子按照某個(gè)方向交替運(yùn)動(dòng);
永磁式步進(jìn)電機(jī)的定子/轉(zhuǎn)子結(jié)構(gòu)如下圖所示:
1.3.2、反應(yīng)式(variable reluctance stepper motor)
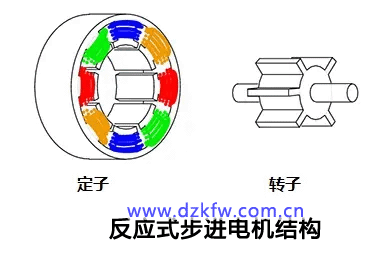
反應(yīng)式步進(jìn)電機(jī)也稱為磁阻式步進(jìn)電機(jī),其轉(zhuǎn)子是一個(gè)非磁性的、軟鐵性質(zhì)的、齒狀結(jié)構(gòu);其定子由勵(lì)磁線圈組成;由于轉(zhuǎn)子是非磁性結(jié)構(gòu),因此在定子沒(méi)有通電之前,定子與轉(zhuǎn)子之間沒(méi)有任何磁性相互作用。因此,反應(yīng)式步進(jìn)電機(jī)沒(méi)有阻尼轉(zhuǎn)矩(detent torque)。
反應(yīng)式步進(jìn)電機(jī)內(nèi)部結(jié)構(gòu)示意圖如下:
1.3.3、混合式(hybrid stepper motor)
顧名思義,混合式步進(jìn)電機(jī)結(jié)合了永磁式和反應(yīng)式步進(jìn)電機(jī)的優(yōu)點(diǎn),它的轉(zhuǎn)子采用永磁性材料,并且將其分成南極(S極)和北極(N極)兩個(gè)部分,每個(gè)部分又有很多的齒狀結(jié)構(gòu),如下圖所示:
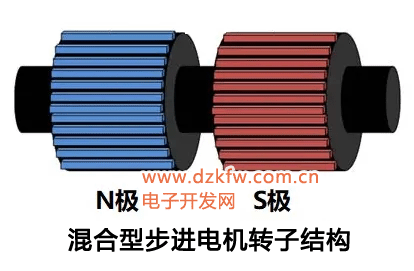
混合式步進(jìn)電機(jī)的定子由勵(lì)磁線圈組成,每一組線圈下面也具有交替分布的齒狀結(jié)構(gòu)。如下圖所示:

混合式步進(jìn)電機(jī)的步距角小、動(dòng)態(tài)性能好,是使用最廣泛的步進(jìn)電機(jī)。下面這張圖是混合式步進(jìn)電機(jī)的轉(zhuǎn)子和定子實(shí)物圖:


1.4、步進(jìn)電機(jī)的特點(diǎn)
步進(jìn)電機(jī)結(jié)構(gòu)簡(jiǎn)單、使用方便、沒(méi)有積累誤差、只需要脈沖信號(hào)就能進(jìn)行工作,因此既可以使用PLC進(jìn)行控制,也可以使用單片機(jī)等能產(chǎn)生脈沖信號(hào)的裝置進(jìn)行控制,在工業(yè)自動(dòng)化控制中使用非常廣泛。
不過(guò)其噪音和震動(dòng)較大,并且可能會(huì)出現(xiàn)失步的情況,因此只適合于精度要求不高的場(chǎng)合。
另外步進(jìn)電機(jī)的位置和速度信號(hào)不能反饋給控制系統(tǒng),一般只能用于開(kāi)環(huán)控制。如果要構(gòu)成閉環(huán)控制系統(tǒng),需要在運(yùn)動(dòng)軸上增加編碼器等信號(hào)反饋裝置。
 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底