
伺服電機定位原理很簡單,電機旋轉帶動絲桿轉換把旋轉量轉換成平移量,脈沖的數量就是移動的距離,我們只要知道脈沖情況就能計算出位置信息。電子齒輪比提供了簡單易用的行程比例變更,如現在一套伺服系統臺達ASDA-B系列的驅動器,編碼器分辨率為160000p/r,機械設備的絲桿導程為10mm,減速機減速比為15,現要求每個脈沖的移動量為1絲,計算電子齒輪比的分母與分子N/M。我們的思路很簡單,不要套公式,進行一個簡單地對比就可以計算出,如下表中的轉換:
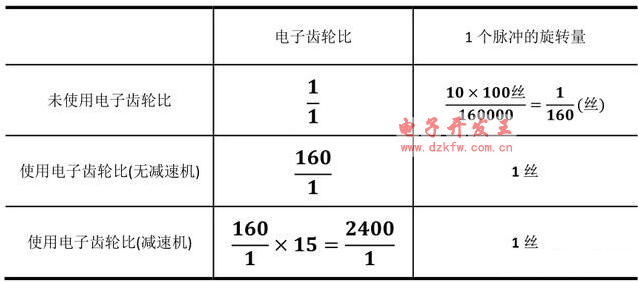
首先考慮不使用電子齒輪比的情況單位脈沖的移動量只有1/160絲,達不到我們的要求因此需要擴大倍數(它的倒數)來滿足,這是在沒有減速機的情況下,如果有減速機它的脈沖量又會縮小,因為需要繼續擴大倍數(減速比),這樣在得出了電子齒輪比的分子2400,分母為1。在臺達驅動器的參數組P1-44電子齒輪比分子設置2400,P1-45分母設置為1即可。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底