
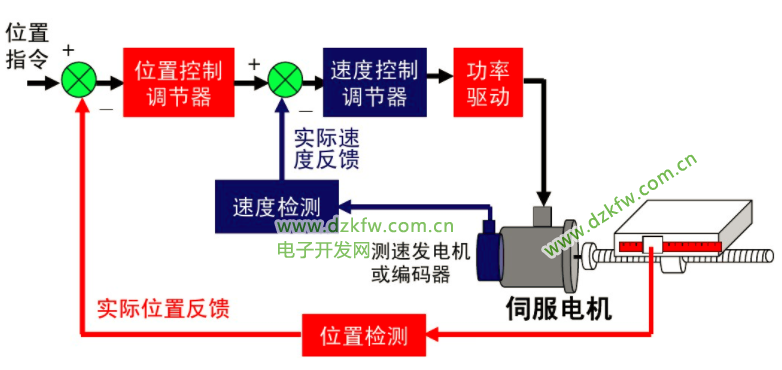
運動伺服一般都是三環(huán)控制系統(tǒng),從內到外依次是電流環(huán)速度環(huán)位置環(huán)。
1、首先電流環(huán):電流環(huán)的輸入是速度環(huán)PID調節(jié)后的那個輸出,我們稱為“電流環(huán)給定”吧,然后呢就是電流環(huán)的這個給定和“電流環(huán)的反饋”值進行比較后的差值在電流環(huán)內做PID調節(jié)輸出給電機,“電流環(huán)的輸出”就是電機的每相的相電流,“電流環(huán)的反饋”不是編碼器的反饋而是在驅動器內部安裝在每相的霍爾元件(磁場感應變?yōu)殡娏麟妷盒盘枺┓答伣o電流環(huán)的。
2、速度環(huán):速度環(huán)的輸入就是位置環(huán)PID調節(jié)后的輸出以及位置設定的前饋值,我們稱為“速度設定”,這個“速度設定”和“速度環(huán)反饋”值進行比較后的差值在速度環(huán)做PID調節(jié)(主要是比例增益和積分處理)后輸出就是上面講到的“電流環(huán)的給定”。速度環(huán)的反饋來自于編碼器的反饋后的值經(jīng)過“速度運算器”得到的。
3、位置環(huán):位置環(huán)的輸入就是外部的脈沖(通常情況下,直接寫數(shù)據(jù)到驅動器地址的伺服例外),外部的脈沖經(jīng)過平滑濾波處理和電子齒輪計算后作為“位置環(huán)的設定”,設定和來自編碼器反饋的脈沖信號經(jīng)過偏差計數(shù)器的計算后的數(shù)值在經(jīng)過位置環(huán)的PID調節(jié)(比例增益調節(jié),無積分微分環(huán)節(jié))后輸出和位置給定的前饋信號的合值就構成了上面講的速度環(huán)的給定。位置環(huán)的反饋也來自于編碼器。
編碼器安裝于伺服電機尾部,它和電流環(huán)沒有任何聯(lián)系,他采樣來自于電機的轉動而不是電機電流,和電流環(huán)的輸入、輸出、反饋沒有任何聯(lián)系。而電流環(huán)是在驅動器內部形成的,即使沒有電機,只要在每相上安裝模擬負載(例如電燈泡)電流環(huán)就能形成反饋工作。
談談PID各自對差值調節(jié)對系統(tǒng)的影響:
1、單獨的P(比例)就是將差值進行成比例的運算,它的顯著特點就是有差調節(jié),有差的意義就是調節(jié)過程結束后,被調量不可能與設定值準確相等,它們之間一定有殘差,殘差具體值您可以通過比例關系計算出。增加比例將會有效減小殘差并增加系統(tǒng)響應,但容易導致系統(tǒng)激烈震蕩甚至不穩(wěn)定。
2、單獨的I(積分)就是使調節(jié)器的輸出信號的變化速度與差值信號成正比,大家不難理解,如果差值大,則積分環(huán)節(jié)的變化速度大,這個環(huán)節(jié)的正比常數(shù)的比例倒數(shù)我們在伺服系統(tǒng)里通常叫它為積分時間常數(shù),積分時間常數(shù)越小意味著系統(tǒng)的變化速度越快,所以同樣如果增大積分速度(也就是減小積分時間常數(shù))將會降低控制系統(tǒng)的穩(wěn)定程度,直到最后出現(xiàn)發(fā)散的震蕩過程。這個環(huán)節(jié)最大的好處就是被調量最后是沒有殘差的。
3、PI(比例積分)就是綜合P和I的優(yōu)點,利用P調節(jié)快速抵消干擾的影響,同時利用I調節(jié)消除殘差。
4、單獨的D(微分)就是根據(jù)差值的方向和大小進行調節(jié)的,調節(jié)器的輸出與差值對于時間的導數(shù)成正比,微分環(huán)節(jié)只能起到輔助的調節(jié)作用,它可以與其他調節(jié)結合成PD和PID調節(jié)。它的好處是可以根據(jù)被調節(jié)量(差值)的變化速度來進行調節(jié),而不要等到出現(xiàn)了很大的偏差后才開始動作,其實就是賦予了調節(jié)器以某種程度上的預見性,可以增加系統(tǒng)對微小變化的響應特性。
5、PID綜合作用可以使系統(tǒng)更加準確穩(wěn)定的達到控制的期望。
伺服的電流環(huán)的PID常數(shù)一般都是在驅動器內部設定好的,操作使用者不需要更改。
速度環(huán)主要進行PI(比例和積分),比例就是增益,所以我們要對速度增益和速度積分時間常數(shù)進行合適的調節(jié)才能達到理想效果。
位置環(huán)主要進行P(比例)調節(jié)。對此我們只要設定位置環(huán)的比例增益就好了。
位置環(huán)、速度環(huán)的參數(shù)調節(jié)沒有什么固定的數(shù)值,要根據(jù)外部負載的機械傳動連接方式、負載的運動方式、負載慣量、對速度、加速度要求以及電機本身的轉子慣量和輸出慣量等等很多條件來決定,調節(jié)的簡單方法是在根據(jù)外部負載的情況進行大體經(jīng)驗的范圍內將增益參數(shù)從小往大調,積分時間常數(shù)從大往小調,以不出現(xiàn)震動超調的穩(wěn)態(tài)值為最佳值進行設定。
當進行位置模式需要調節(jié)位置環(huán)時,最好先調節(jié)速度環(huán)(此時位置環(huán)的比例增益設定在經(jīng)驗值的最小值),調節(jié)速度環(huán)穩(wěn)定后,在調節(jié)位置環(huán)增益,適量逐步增加,位置環(huán)的響應最好比速度環(huán)慢一點,不然也容易出現(xiàn)速度震蕩。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底