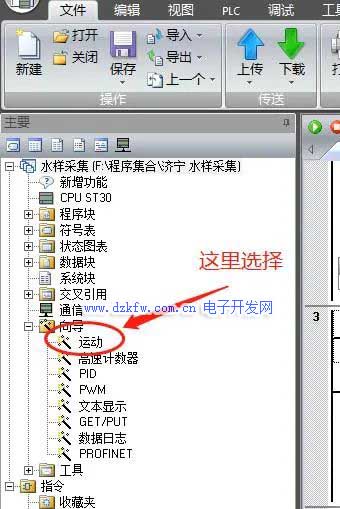
S7-200 smart 運動控制指令由編程軟件向導生成,運動控制指令有很多條構成,且每條指令都帶有很多接口參數,想要使用這些指令,要先知道接口是什么意思,雖然幫助文章都有解釋,但讀懂幫助文件也很費勁,今天就詳細給大家介紹運動指令的使用。S7-200 SMRAT 運動控制指令如下圖生成:1、選擇"運動"右鍵打開。
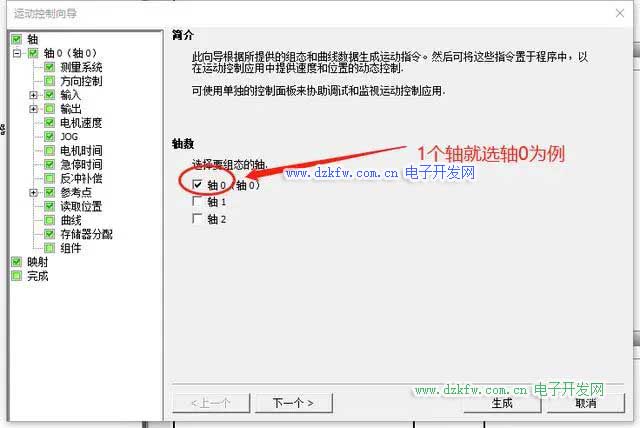
2、本次就以"軸0"為例。
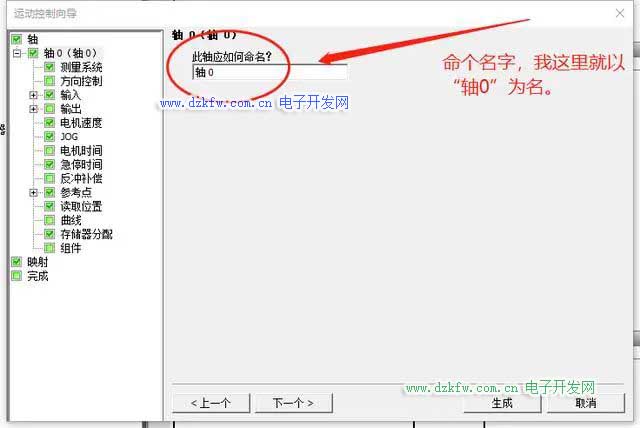
3、命個名字。
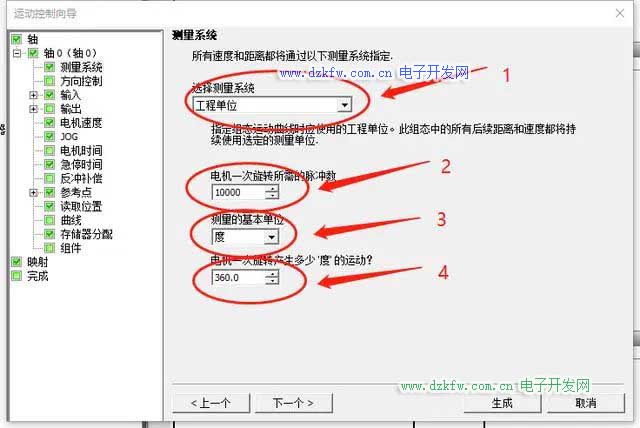
4、數字1位選擇工程單位,可以使工程單位,也可以使用脈沖。數字2是電機旋轉一圈的脈沖量,我目前步進撥碼設定是10000個脈沖旋轉一周數字3是單位,根據自己需要設定數字4是電機旋轉一圈的工程量,我設定的是360度,也就是說10000個脈沖對應360度。
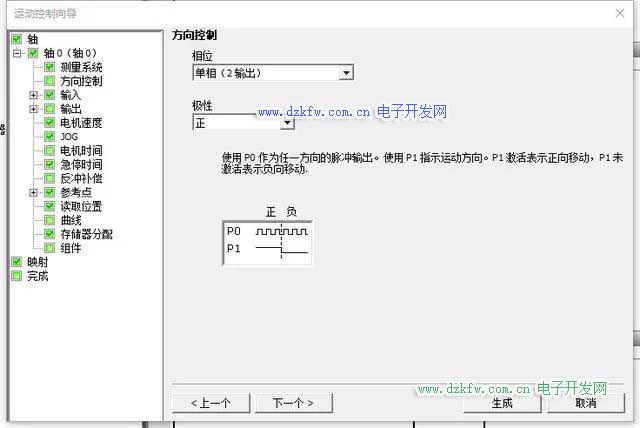
5、方向控制,我是用的脈沖加方向,所以選擇單項2軸。
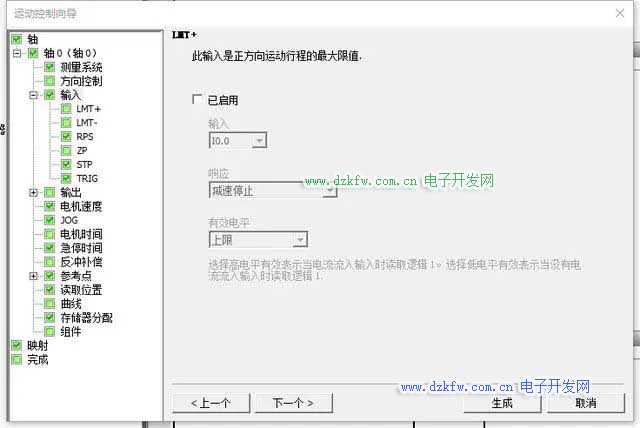
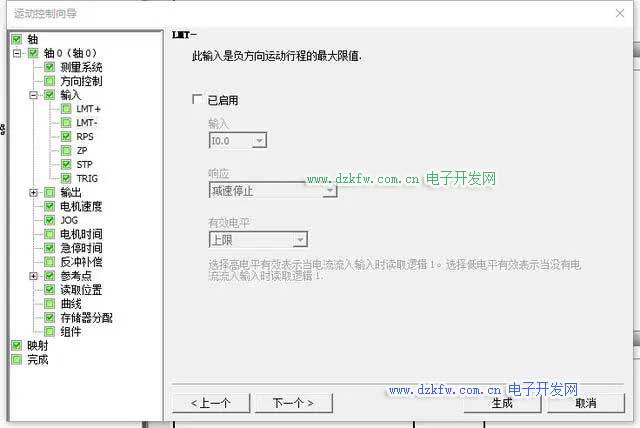
6、正負極限根據需要設定,我這個沒有正負極限就沒有選擇。
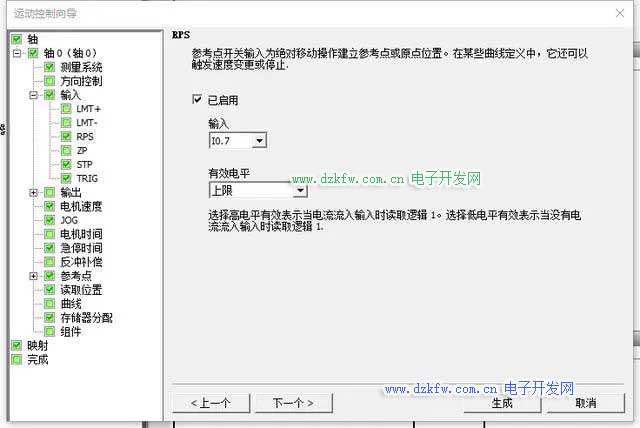
7、零電位使用,走絕對位置和相對位置之前一定要定義好原點,否則絕對位置和相對位置不運行。
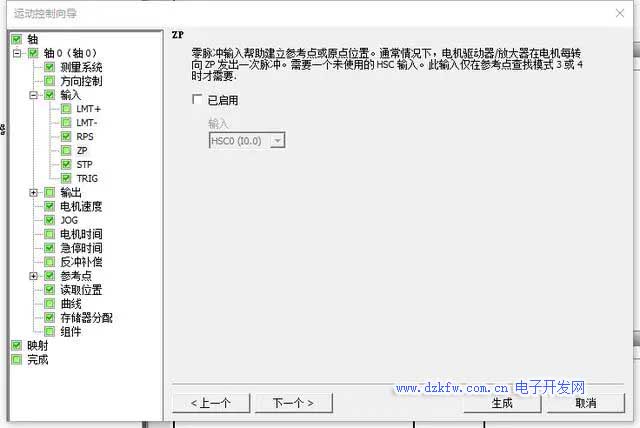
8、0脈沖位置,也可以使用此點定義0點。
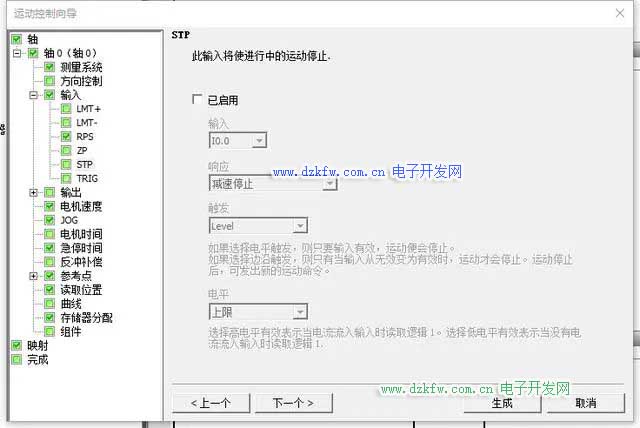
9、停止根據需要選擇,通過閱讀STP就能理解什么意思。
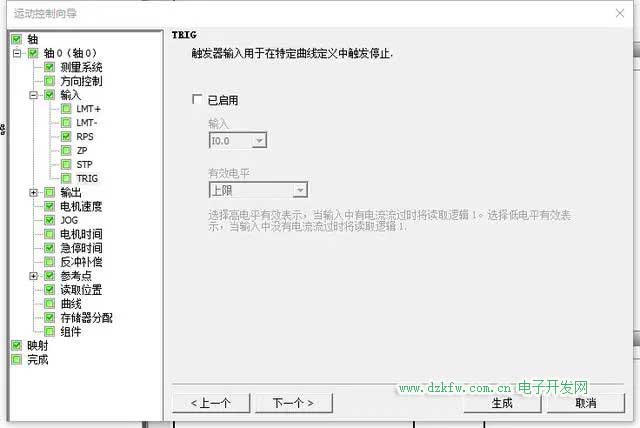
10、停止根據需要選擇,通過閱讀TRIG就能理解什么意思。
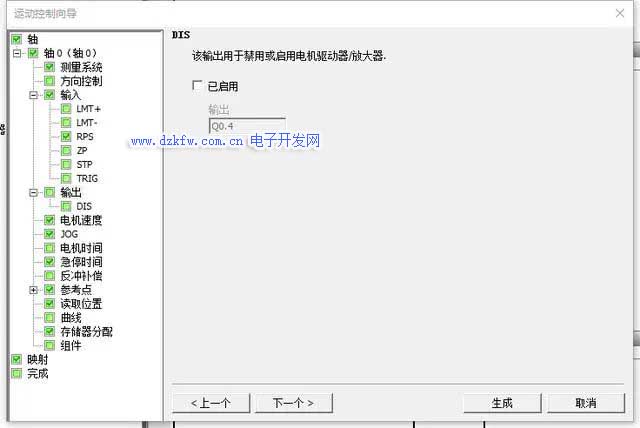
11、禁用根據需要選擇,通過閱讀DIS就能理解什么意思。
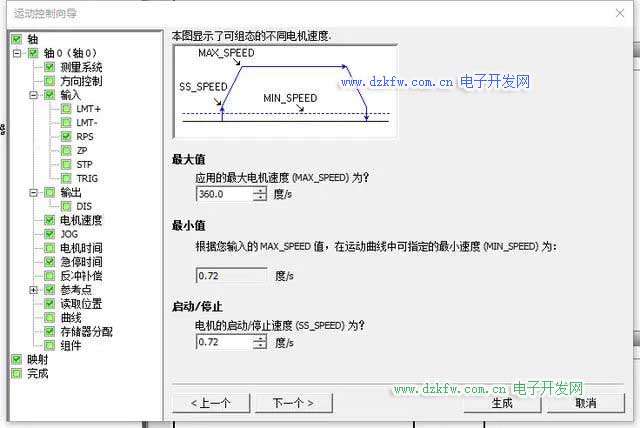
12、最大速度和最小速度根據現場情況設定,我設定最大速度為360度/秒。
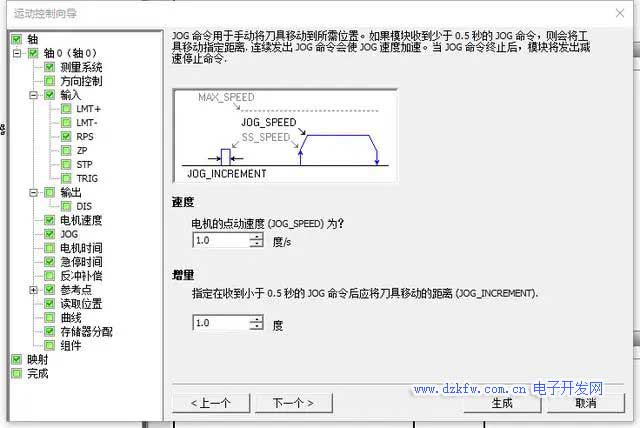
13、JOG命令也就是手動運行,根據需要設定速度,建議設定小一些,看看運行速度再調整。
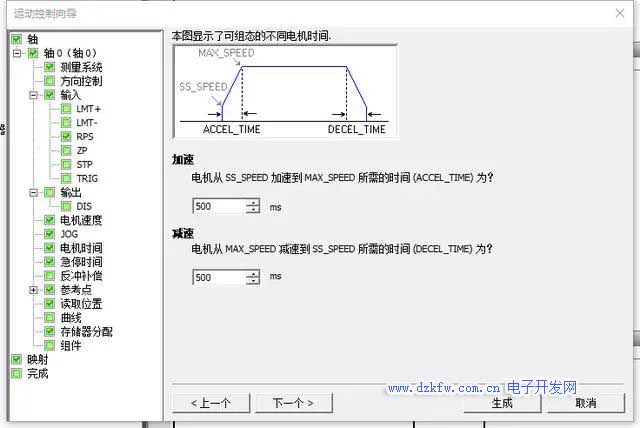
14、此處設定加減速時間,也就是脈沖輸出的加減速時間,根據現場情況設定。
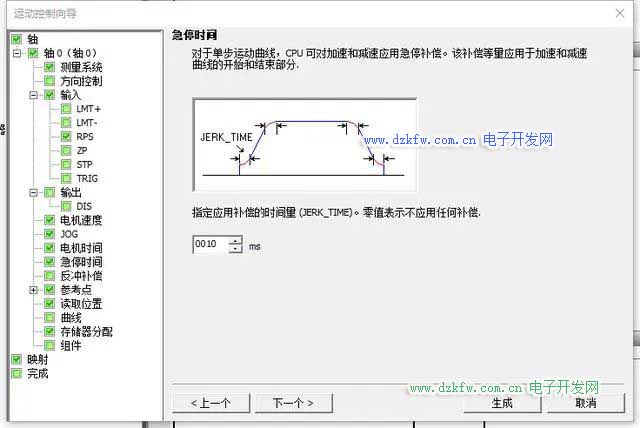
15、急停補償。
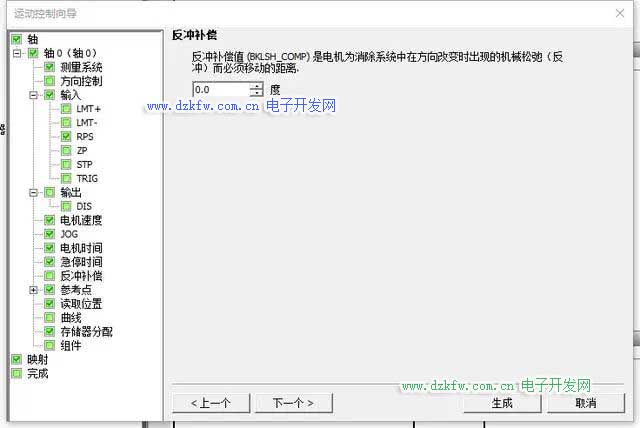
16、反沖補償,也就是校準絲杠間隙。
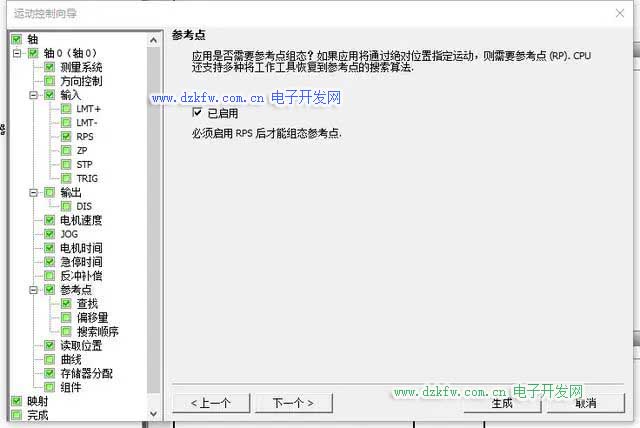
17、參考點設定
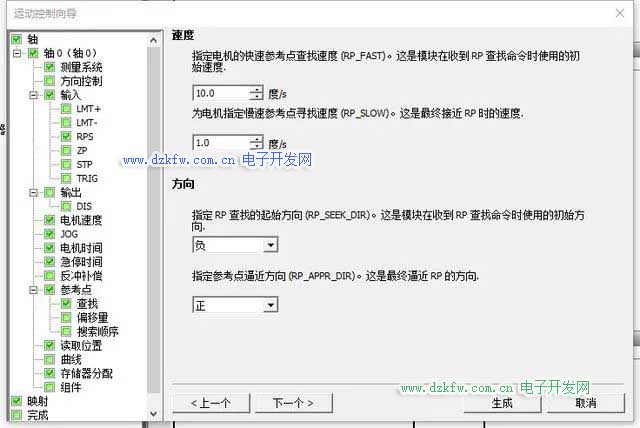
18、找零點時速度和方向設定。
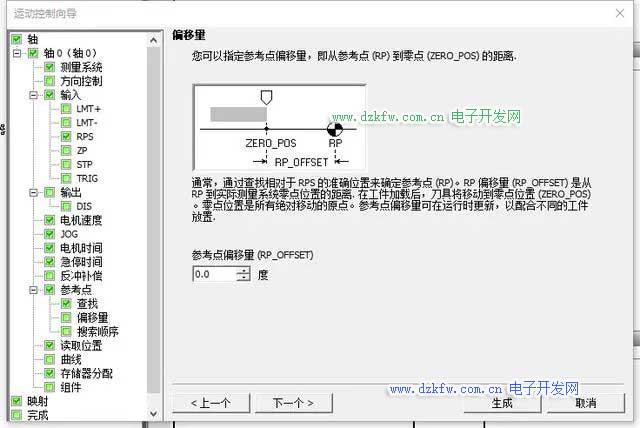
19、偏移量設定
20、搜索參考點方式選擇
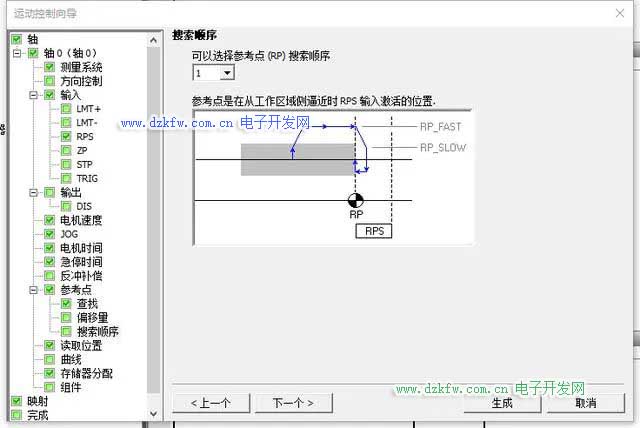
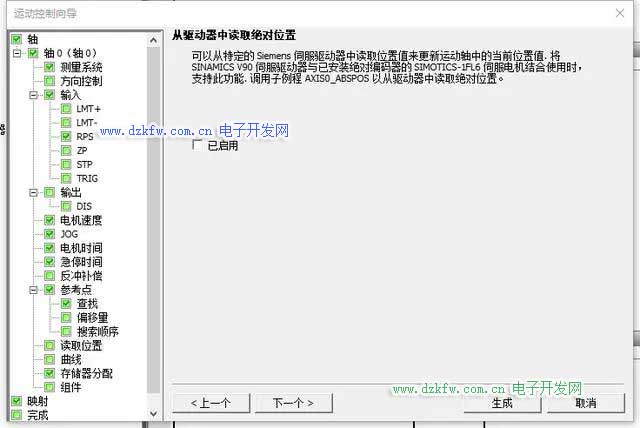
21、從驅動器中讀取絕對位置
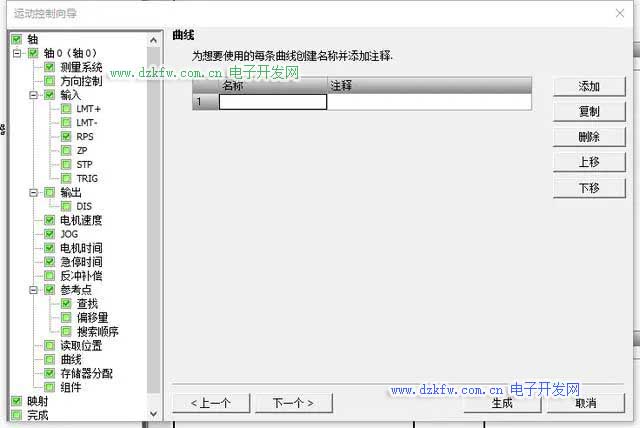
22、曲線設定,我這里沒用曲線,沒有生成曲線。
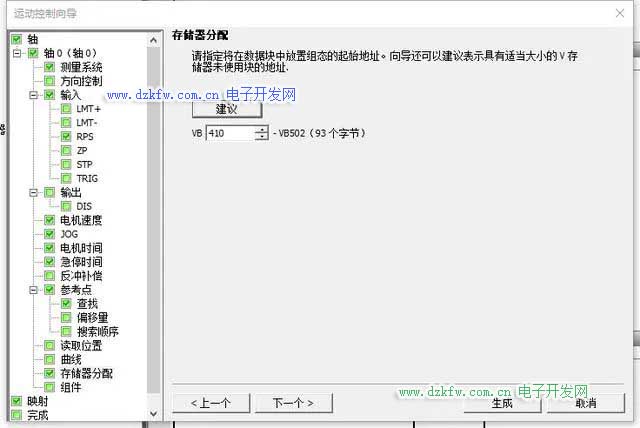
23、點"建議"自動分配地址。
24、組件
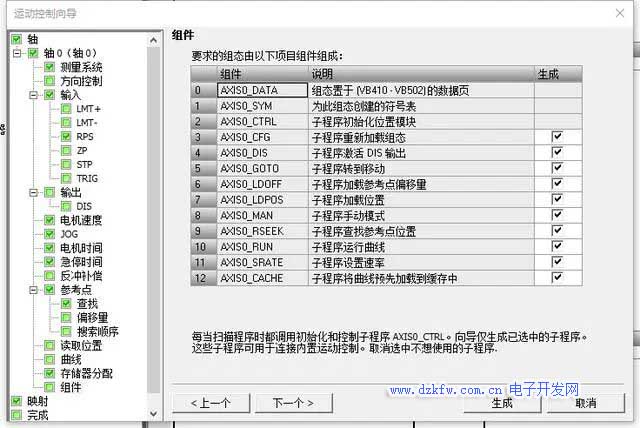
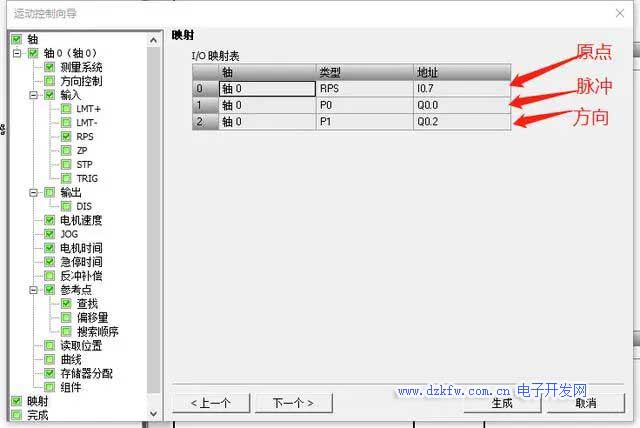
25、映射顯示
26、完成,點擊生成就完成了。
1.啟用并初始化軸AXISx_CTRL子程序(控制)啟用和初始化運動軸,方法是自動命令運動軸每CPU更改為RUN模式時加載組態/曲線表。在項目中只對每條運動軸使用此子程序一次,并確保程序會在每次掃描時調用此子程序。使用SM0.0(始終開啟)作為EN參數的輸入。
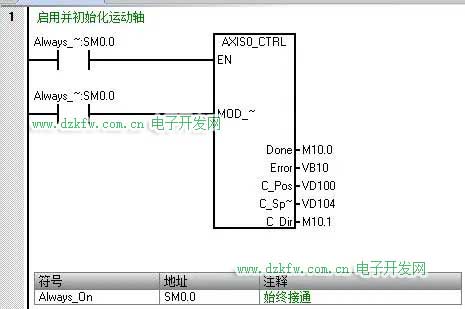
管腳含義:MODE:啟用模塊。1=可發送命令;0=中止進行中的任何命令Done:完成標志位Error:錯誤代碼(字節)C_Pos:軸的當前位置(絕對定位或者相對定位),工程單位:Real型數據;相對脈沖:DINT型數據C_Speed:軸的當前速度,Real型數據C_Dir:軸的當前方向(1=反向,0=正向)2.手動控制軸AXISx_MAN子例程(手動模式)將運動軸置為手動模式。這允許電機按不同的速度運行,或沿正向或負向慢進。在同一時間僅能啟用RUN、JOG_P或JOG_N輸入之一。
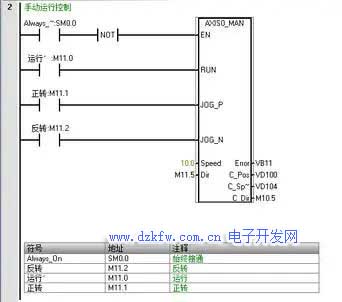
管腳含義:RUN:1=軸手動運行(速度和方向分別由Speed和Dir管腳控制)0=停止手動控制JOG_P:1=正轉點動控制JOG_N:1=反轉點動控制Speed:RUN運行時的目標速度,Real型數據Dir:RUN運行時的方向Error:錯誤代碼(字節)C_Pos:軸當前位置(絕對定位或者相對定位),工程單位:Real型數據;相對脈沖:DINT型數據C_Speed:軸當前速度,Real型數據C_Dir:軸的當前方向(1=反向,0=正向)3、查找參考點走絕對位置和相對位置前需要找到真實的零點,絕對位置和相對位置才能根據零點運行。AXISx_RSEEK子程序(搜索參考點位置)使用組態/曲線表中的搜索方法啟動參考點搜索操作。運動軸找到參考點且運動停止后,運動軸將RP_OFFSET參數值載入當前位置。
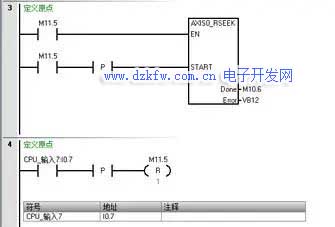
管腳含義:START:每接通一個掃描周期,就執行一次查找參考點(參考點查找方式由軸組態確定)Done:完成標志位Error:錯誤代碼(字節)4.絕對或者相對定位AXISx_GOTO子程序命令運動軸轉到所需位置。
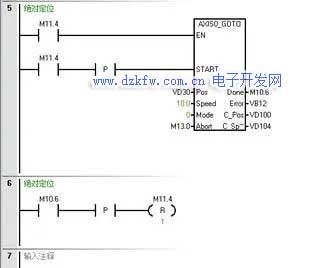
管腳含義:START:每接通一個掃描周期,就執行一次定位Pos:目標位置(絕對定位為坐標點,相對定位為兩點間距離),工程單位:Real型數據;相對脈沖:DINT型數據Speed:目標速度,Real型數據MODE:移動模式0:絕對位置 1:相對位置 2:單速連續 正向旋轉 3:單速連續反向旋轉Abort:停止正在執行的運動Done:完成標志位Error:錯誤代碼(字節)C_Pos:軸當前位置(絕對定位或者相對定位),工程單位:Real型數據;相對脈沖:DINT型數據C_Speed:軸當前速度,Real型數據

 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底