
ę╗Īóėą╦ó±R▀_Ą─įŁ└Ē
ę¬ųvŪÕ▀@ę╗å¢Ņ}Ż¼─ŪŠ═æ¬┤ų┬įĄž┴╦ĮŌę╗Ž┬ėą╦ó±R▀_Ą─╣żū„įŁ└ĒĪŻĮėŽ┬üĒė├ę╗éĆ╚²ļŖśOĪóČ■┤┼śOā╚(n©©i)▐D(zhu©Żn)ūėėą╦ó±R▀_ū„×ķč▌╩ŠĪŻ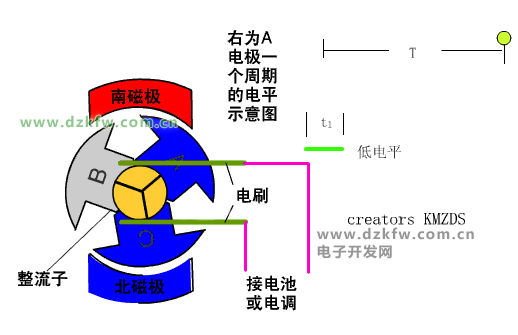
Č■Īó¤o╦óļŖÖC╣żū„įŁ└Ē
╩ūŽ╚Ż¼¤o╦óļŖÖC▓╗╩Ūų▒┴„ļŖÖCŻ¼─Żą═ļm╚╗╩Ūų▒┴„ļŖ│ž╣®ļŖŻ¼Ą½═©▀^¤o╦óļŖš{(di©żo)ų«║¾Š═▐D(zhu©Żn)ūā?y©Łu)ķ┴╦╚²ŽÓĮ╗ūāļŖ┴„é„▌öĄ(sh©┤)Į┴╦╚²éĆśOąį╔ŽĪŻ═©▀^Ž┬łD┐╔ęį┐┤│÷Ż¼¤o╦óļŖÖC╩Ūø]ėą╠╝╦óĄ─Ż¼║═ėą╦óŽÓĘ┤Ż¼¤o╦óļŖÖCĄ─┤┼ĶF│╔┴╦▐D(zhu©Żn)ūė~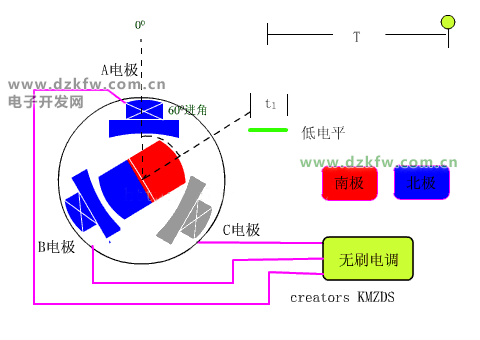
╚²Īó¤o╦óļŖÖCĄ─├³├¹
ŽÓī”ėą╦óļŖÖCŻ¼¤o╦óļŖÖCĄ─├³├¹║├└ĒĮŌ║▄ČÓŻ¼ę╗░Ń╦³ė╔╦─éĆöĄ(sh©┤)ūųĮM│╔Ż¼└²╚ń2040¤o╦óļŖÖCĪŻ▀@éĆöĄ(sh©┤)ūųāH┤·▒ĒļŖÖCĄ─═Ōą╬│▀┤ńŻ¼2040▒Ē╩Šų▒ÅĮ×ķ20mmŻ¼ķLČ╚×ķ40mmĄ─ļŖÖCĪŻ═¼└Ē3650¤o╦óļŖÖC▒Ē╩Š┤╦ļŖÖCų▒ÅĮ36mmŻ¼ķLČ╚50mmĪŻ
ŲõīŹ370ėą╦óļŖÖCĄ─┤¾ąĪ║═2530¤o╦óļŖÖCę╗śėŻ¼540ļŖÖCĄ─┤¾ąĪ║═3650¤o╦óļŖÖCę╗śėĪŻ
╦─Īó¤o╦óļŖÖCĄ─╠ž³c
1Īóø]ėą╠╝╦óŻ¼└Ēšō╔Ž▐D(zhu©Żn)ūė¤oąĶ║══ŌĮńėąī¦¾w╔ŽĄ─µ£ĮėĪŻ
2Īóį┌▀\ąą▀^│╠ųąŻ¼¤o╦óļŖÖCĄ─▐D(zhu©Żn)╦┘╩Ū┐┐Į╗┴„ļŖĄ─Ņl┬╩øQČ©Ą─Ż¼╦∙ęįŅl┬╩įĮĖ▀¤o╦óļŖÖC┐╔ęį▐D(zhu©Żn)Ą├įĮ┐ņĪŻ
3Īó¤o╦óļŖÖCĄ─▐D(zhu©Żn)╦┘╩Ūć└Ė±░┤ššKVųĄįOČ©Ą─Ż¼1000KV▒Ē╩Š├┐ę╗ĖŻ╠žļŖÖC▐D(zhu©Żn)╦┘╝ė┐ņ1000▐D(zhu©Żn)ĪŻ╦∙ęįļŖē║×ķ5VĢrŻ¼1000kvĄ─¤o╦óļŖÖC▐D(zhu©Żn)╦┘5000rpmĪŻ
4Īóį┌▀\ąą▀^│╠ųąŻ¼═¼śė▐D(zhu©Żn)╦┘ļŖÖCĄ─┼ż┴”╩Ū┐┐ļŖš{(di©żo)▌ö│÷Ą─ļŖ┴„ÅŖČ╚øQČ©Ą─Ż¼ļŖ┴„įĮ┤¾┼ż┴”įĮ┤¾ĪŻ(└ĒŽļĀŅæB(t©żi)Ž┬Ż¼╬ęéāĪ░┬ö├„Ī▒Ą─¤o╦óļŖš{(di©żo)Ģ■▓╗öÓĪ░▒O(ji©Īn)£yĪ▒╬ęéāĄ─ļŖÖC╩ŪʱąĶę¬Ė³┤¾Ą─┼ż┴”Ż¼═¼Ģrę▓Ģ■▒ŻūC┼ż┴”▓╗▀^╩ŻŻ¼ęį├Ō└╦┘M▒ĒŪķ)
╬ÕĪó═Ō▐D(zhu©Żn)ūė┼cā╚(n©©i)▐D(zhu©Żn)ūė¤o╦óļŖÖC
╔Ž├µ¤o╦óļŖÖC╣żū„įŁ└ĒłD╦∙╩ŠĄ─╩Ūā╚(n©©i)▐D(zhu©Żn)ūė¤o╦óļŖÖCŻ¼ŅÖ├¹╦╝┴xŻ¼┤┼ĶFį┌└’▀ģĪŻČ°═Ō▐D(zhu©Żn)ūė¤o╦óļŖÖCätŽÓĘ┤Ż¼╦³Ą─┤┼ĶFĪ░░³Ī▒į┌═Ō├µŻ¼Č°AĪóBĪóCļŖśOį┌└’▀ģŻ¼▀@śėĄ─įOėŗ┐╔ęįūīļŖÖCĄ─┼ż┴”Ė³┤¾Ż¼Ą½▐D(zhu©Żn)╦┘ģs╔Ž▓╗üĒĪŻį┌─Żą═ųąŻ¼ę╗░Ń═Ō▐D(zhu©Żn)ūė¤o╦óļŖÖCĄ─KVųĄį┌2000ęįā╚(n©©i)Ż¼Č°ā╚(n©©i)▐D(zhu©Żn)ūė¤o╦óļŖÖCät┐╔ęįĄĮ8000-9000kvĪŻę“×ķ▀@éĆįŁę“Ż¼ę╗░Ń’wÖC╔Ž│ŻęŖ═Ō▐D(zhu©Żn)ūė¤o╦óļŖÖCŻ¼Č°─Żą═▄ć║═─Żą═┤¼ę╗░ŃČ╝╩╣ė├ā╚(n©©i)▐D(zhu©Żn)ūė¤o╦óļŖÖCĪŻ
┴∙ĪóėąĖą¤o╦ó║═¤oĖą¤o╦ó
꬚f├„▀@éĆå¢Ņ}╩ūŽ╚ę¬┼¬Č«Ėą╩ŪĖąĄ─╔Č~Ż¼ėąĖą¤o╦óųąĄ─Ėą╩ŪųĖĪ░╗¶Ā¢é„ĖąŲ„Ī▒Ż¼─Ū├┤╩▓├┤╩ŪĪ░╗¶Ā¢Ī▒─žŻ┐╗¶Ā¢╩ŪųĖĄ─╗¶Ā¢ą¦æ¬Ż¼▀@ę╗¼F(xi©żn)Ž¾╩Ū├└ć°╬’└ĒīW╝ę╗¶Ā¢Ż©A.H.HallŻ¼1855Ī¬1938Ż®ė┌1879─Ļį┌蹊┐Įī┘Ą─ī¦ļŖÖCśŗĢr░l(f©Ī)¼F(xi©żn)Ą─ĪŻ«öļŖ┴„┤╣ų▒ė┌═Ō┤┼ł÷═©▀^ī¦¾wĢrŻ¼į┌ī¦¾wĄ─┤╣ų▒ė┌┤┼ł÷║═ļŖ┴„ĘĮŽ“Ą─ā╔éĆČ╦├µų«ķgĢ■│÷¼F(xi©żn)ļŖä▌▓ŅŻ¼▀@ę╗¼F(xi©żn)Ž¾▒Ń╩Ū╗¶Ā¢ą¦æ¬ĪŻ▀@éĆļŖä▌▓Ņę▓▒╗Įąū÷╗¶Ā¢ļŖä▌▓ŅĪŻ
─Ū├┤╬ęéā?y©Łu)ķ╩▓├┤ę¬Ėąæ¬▀@═µęŌŻ┐꬚fŪÕ▀@éĆå¢Ņ}Š═▒žĒÜÅ─¤oĖą¤o╦óĄ─ę╗éĆ╚▒³cšfŲĪŻäé▓┼šf┴╦¤o╦óļŖÖCĄ─▐D(zhu©Żn)╦┘╩Ū┐┐Į╗┴„ļŖŅl┬╩øQČ©Ą─Ż¼─Ū├┤ļŖš{(di©żo)ꬎļĘĮįOĘ©┼¬├„░ū─┐Ū░ļŖÖCĄ─▐D(zhu©Żn)╦┘ęį╝░«öŪ░ļŖÖCĄ─ĀŅæB(t©żi)ĪŻŲõīŹ▀@ī”ęčĮø(j©®ng)š²│Ż▀\▐D(zhu©Żn)Ą─ļŖÖCüĒšf║▄╚▌ęūŻ¼Ą½ī”ė┌ę╗éĆäéäéŲ▓Į╗“š▀▀\ąą╦┘Č╚║▄┬²Ą─ļŖÖCüĒšfŠ═’@Ą├▒╚▌^┬ķ¤®┴╦(║▄ļy▌^£╩┤_Ą─£y│÷ļŖÖC▐D(zhu©Żn)╦┘Ą─ĀŅæB(t©żi))Ż¼╦∙ęį¤oĖą¤o╦óļŖÖCĢ■į┌Ą═╦┘ĢrŠĆąį▓╗║├╔§ų┴┐╔─▄Ģ■ŅØČČŻ¼Č°Ų▓ĮĄ─┼ż┴”ę▓ļyęįÅŖ▀^═¼Ą╚╝ēėą╦óļŖÖCĪŻ
Ą½╩Ū╚╦éā░l(f©Ī)¼F(xi©żn)¤ošō╩▓├┤▀\ąąĀŅæB(t©żi)Ą─¤o╦óļŖÖCŻ¼╦³Ą─╗¶Ā¢ą¦æ¬Č╝╩Ū├„’@Ą─Ż¼╦∙ęį═©▀^╗¶Ā¢ą¦æ¬ļŖš{(di©żo)┐╔ęį║▄╚▌ęūĄ─ų¬Ą└¤ošōĖ▀╦┘▀Ć╩ŪĄ═╦┘ļŖÖCĄ─▀\ąąĀŅæB(t©żi)Ż¼Å─Č°ĮŌøQ┴╦¤oĖą¤o╦óļŖÖCĄ─├½▓ĪŻĪĄ½Š═─┐Ū░üĒ┐┤╗¶Ā¢é„ĖąŲ„▓ó▓╗╩Ū┴«āržøŻ¼╦∙ęįėąĖą¤o╦óļŖÖCĪóļŖš{(di©żo)Ą─ārĖ±Ģ■▒╚¤oĖą¤o╦ó┘F╔ŽįSČÓĪŻ
Ų▀Īó│ŻęŖ─Żą═ė├ėą╦óĪó¤oĖą¤o╦óĪóėąĖą¤o╦óļŖÖCī”▒╚
ėą╦óļŖÖCĪĪĪĪĪĪĪĪ¤oĖą¤o╦óĪĪĪĪĪĪĪĪėąĖą¤o╦ó
▐D(zhu©Żn)ōQą¦┬╩Ż║ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĄ═ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĖ▀ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĖ▀
ļŖÖC▌ö│÷╣”┬╩Ż║ĪĪĪĪĪĪĪĪĪĪĪĪĄ═ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĖ▀ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĖ▀
Ų▓Į┼ż┴”Ż║ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪ║├ĪĪĪĪĪĪĪĪĪĪĪĪĪĪę╗░ŃĪĪĪĪĪĪĪĪĪĪĪĪĪĪ║├
ųąĖ▀╦┘┼ż┴”Ż║ĪĪĪĪĪĪĪĪĪĪĪĪĪĪę╗░ŃĪĪĪĪĪĪĪĪĪĪĪĪ║├ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪ║├
Ą═╦┘ŠĆąįŻ║ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪ▌^║├ĪĪĪĪĪĪĪĪĪĪĪĪę╗░ŃĪĪĪĪĪĪĪĪĪĪĪĪĪĪ║├
ųąĖ▀╦┘ŠĆąįŻ║ĪĪĪĪĪĪĪĪĪĪĪĪĪĪ║├ĪĪĪĪĪĪĪĪĪĪĪĪĪĪ║├ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪ║├
ūŅĖ▀╦┘Č╚(ę╗░Ń540ļŖÖC)Ż║ĪĪ│ŻęŖ2╚fĪĪĪĪĪĪĪĪ│ŻęŖ5╚fĪĪĪĪĪĪĪĪĪĪ│ŻęŖ5╚f
ęū─źōp│╠Č╚Ż║ĪĪĪĪĪĪĪĪĪĪĪĪ╚▌ęū─źōpĪĪĪĪĪĪĪĪ▓╗ęū─źōpĪĪĪĪĪĪĪĪĪĪ▓╗ęū─źōp
ļŖÖCārĖ±(540╝ē)ĪĪĪĪĪĪĪĪųąÖn100RMBĪĪĪĪĪĪūŅĄ═120RMBĪĪĪĪĪĪūŅĄ═200RMB
ļŖš{(di©żo)ārĖ±(540╝ē)ĪĪĪĪĪĪųąÖnŲĮŠ∙120ū¾ėę ūŅĄ═200RMBĪĪĪĪĪĪūŅĄ═300RMB
¤o╦óļŖÖCĄ─╣żū„įŁ└Ēįö╝ÜĮŌūx
ĘųŽĒę╗Ų¬ĻPė┌¤o╦óļŖÖCĄ─╣żū„įŁ└Ēę╗ą®ų¬ūRŻ¼┤_▒Żų╗ę¬ėąĖ▀ę╗╬’└Ēų¬ūRĄ─┼¾ėčŠ═─▄ē“┐┤Ą├Č«Ż¼ŽŻ═¹ėą┼d╚żĄ─┼¾ėč─═ą─═∙Ž┬┐┤Ż¼ŽÓ╗źīW┴Ģ! ╩ūŽ╚Įo┤¾╝ęÅ═┴ĢÄūéĆ╗∙ĄAČ©ätŻ║ū¾╩ųČ©ätĪóėę╩ųČ©ätĪóėę╩ų┬▌ą²Č©ätĪŻäeŃ┬▒ŲŻ¼╬ęŽ┬├µĢ■Įo┤¾╝ęĮŌßīĪŻ ū¾╩ųČ©ätŻ¼▀@éĆ╩ŪļŖÖC▐D(zhu©Żn)äė╩▄┴”Ęų╬÷Ą─╗∙ĄAŻ¼║åå╬šfŠ═╩Ū┤┼ł÷ųąĄ─▌d┴„ī¦¾wŻ¼Ģ■╩▄ĄĮ┴”Ą─ū„ė├ĪŻ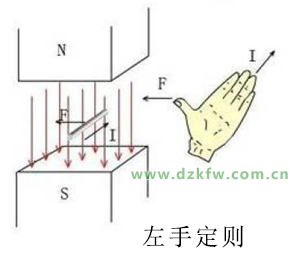
ūī┤┼ĖąŠĆ┤®▀^╩ųšŲš²├µŻ¼╩ųųĖĘĮŽ“×ķļŖ┴„ĘĮŽ“Ż¼┤¾─┤ųĖĘĮŽ“×ķ«a(ch©Żn)╔·┤┼┴”Ą─ĘĮŽ“Ż¼╬ęŽÓą┼Ž▓Üg═µ─Żą═Ą─╚╦Č╝▀Ćėąę╗Č©╬’└Ē╗∙ĄAĄ─╣■╣■ĪŻ ėę╩ųČ©ätŻ¼▀@╩Ū«a(ch©Żn)╔·Ėą╔·ļŖäėä▌Ą─╗∙ĄAŻ¼Ė·ū¾╩ųČ©ätĄ─ŽÓĘ┤Ż¼┤┼ł÷ųąĄ─ī¦¾wę“╩▄ĄĮ┴”Ą─Ā┐ę²ŪąĖŅ┤┼ĖąŠĆ«a(ch©Żn)╔·ļŖäėä▌ĪŻ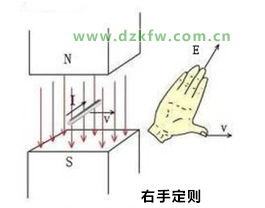
ūī┤┼ĖąŠĆ┤®▀^šŲą─Ż¼┤¾─┤ųĖĘĮŽ“×ķ▀\äėĘĮŽ“Ż¼╩ųųĖĘĮŽ“×ķ«a(ch©Żn)╔·Ą─ļŖäėä▌ĘĮŽ“ĪŻ×ķ╩▓├┤ę¬ųvĖą╔·ļŖäėä▌─ž?▓╗ų¬Ą└┤¾╝ęėąø]ėąŅÉ╦ŲĄ─Įø(j©®ng)ÜvŻ¼░čļŖÖCĄ─╚²ŽÓŠĆ║Žį┌ę╗ŲŻ¼ė├╩ų╚ź▐D(zhu©Żn)äėļŖÖCĢ■░l(f©Ī)¼F(xi©żn)ūĶ┴”ĘŪ│Ż┤¾Ż¼▀@Š═╩Ūę“×ķį┌▐D(zhu©Żn)äėļŖÖC▀^│╠ųą«a(ch©Żn)╔·┴╦Ėą╔·ļŖäėä▌Ż¼Å─Č°«a(ch©Żn)╔·ļŖ┴„Ż¼┤┼ł÷ųąļŖ┴„┴„▀^ī¦¾wėųĢ■«a(ch©Żn)╔·║═▐D(zhu©Żn)äėĘĮŽ“ŽÓĘ┤Ą─┴”Ż¼┤¾╝ęŠ═Ģ■ĖąėX▐D(zhu©Żn)äėėą║▄┤¾Ą─ūĶ┴”ĪŻ▓╗ą┼┐╔ęįįćįćĪŻ
╚²ŽÓŠĆĘųķ_Ż¼ļŖÖC┐╔ęį▌p╦╔▐D(zhu©Żn)äė
╚²ŽÓŠĆ║Ž▓óŻ¼ļŖÖC▐D(zhu©Żn)äėūĶ┴”ĘŪ│Ż┤¾ ėę╩ų┬▌ą²Č©ätŻ¼ė├ėę╩ų╬šūĪ═©ļŖ┬▌ŠĆ╣▄Ż¼╩╣╦─ųĖÅØŪ·┼cļŖ┴„ĘĮŽ“ę╗ų┬Ż¼─Ū├┤┤¾─┤ųĖ╦∙ųĖĄ──Ūę╗Č╦Š═╩Ū═©ļŖ┬▌ą²╣▄Ą─NśOĪŻ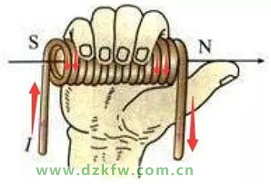
▀@éĆČ©ät╩Ū═©ļŖŠĆ╚”┼ąöÓśOąįĄ─╗∙ĄAŻ¼╝t╔½╝²Ņ^ĘĮŽ“╝┤×ķļŖ┴„ĘĮŽ“ĪŻ ┐┤═Ļ┴╦╚²┤¾Č©ätŻ¼╬ęéāĮėŽ┬üĒŽ╚┐┤┐┤ļŖÖC▐D(zhu©Żn)äėĄ─╗∙▒ŠįŁ└ĒĪŻ Ą┌ę╗▓┐ĘųŻ║ų▒┴„ļŖÖC─Żą═ ╬ęéāšęĄĮę╗éĆųąīW╬’└ĒīW▀^Ą─ų▒┴„ļŖÖCĄ──Żą═Ż¼═©▀^┤┼╗ž┬ĘĘų╬÷Ę©üĒ▀Mąąę╗éĆ║åå╬Ą─Ęų╬÷ĪŻ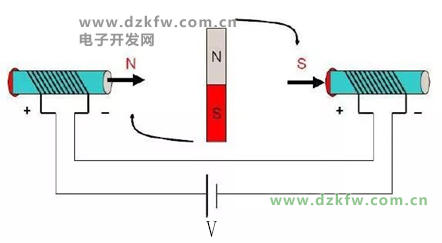
ĀŅæB(t©żi)1 «öā╔Ņ^Ą─ŠĆ╚”═©╔ŽļŖ┴„ĢrŻ¼Ė∙ō■(j©┤)ėę╩ų┬▌ą²Č©ätŻ¼Ģ■«a(ch©Żn)╔·ĘĮŽ“ųĖŽ“ėęĄ─═Ō╝ė┤┼Ėąæ¬ÅŖČ╚B(╚ń┤ų╝²Ņ^ĘĮŽ“╦∙╩Š)Ż¼Č°ųąķgĄ─▐D(zhu©Żn)ūėĢ■▒M┴┐╩╣ūį╝║ā╚(n©©i)▓┐Ą─┤┼ĖąŠĆĘĮŽ“┼c═Ō┤┼ĖąŠĆĘĮŽ“▒Ż│ųę╗ų┬Ż¼ęįą╬│╔ę╗éĆūŅČ╠ķ]║Ž┤┼┴”ŠĆ╗ž┬ĘŻ¼▀@śėā╚(n©©i)▐D(zhu©Żn)ūėŠ═Ģ■░┤ĒśĢrßśĘĮŽ“ą²▐D(zhu©Żn)┴╦ĪŻ «ö▐D(zhu©Żn)ūė┤┼ł÷ĘĮŽ“┼c═Ō▓┐┤┼ł÷ĘĮŽ“┤╣ų▒ĢrŻ¼▐D(zhu©Żn)ūė╦∙╩▄Ą─▐D(zhu©Żn)äė┴”ŠžūŅ┤¾ĪŻūóęŌ▀@└’šfĄ─╩ŪĪ░┴”ŠžĪ▒ūŅ┤¾Ż¼Č°▓╗╩ŪĪ░┴”Ī▒ūŅ┤¾ĪŻš\╚╗Ż¼į┌▐D(zhu©Żn)ūė┤┼ł÷┼c═Ō▓┐┤┼ł÷ĘĮŽ“ę╗ų┬ĢrŻ¼▐D(zhu©Żn)ūė╦∙╩▄┤┼┴”ūŅ┤¾Ż¼Ą½┤╦Ģr▐D(zhu©Żn)ūė│╩╦«ŲĮĀŅæB(t©żi)Ż¼┴”▒█×ķ0Ż¼«ö╚╗ę▓Š═▓╗Ģ■▐D(zhu©Żn)äė┴╦ĪŻča│õę╗ŠõŻ¼┴”Šž╩Ū┴”┼c┴”▒█Ą─│╦ĘeĪŻŲõųąę╗éĆ×ķ┴ŃŻ¼│╦ĘeŠ═×ķ┴Ń┴╦ĪŻ «ö▐D(zhu©Żn)ūė▐D(zhu©Żn)ĄĮ╦«ŲĮ╬╗ų├ĢrŻ¼ļm╚╗▓╗į┘╩▄ĄĮ▐D(zhu©Żn)äė┴”ŠžĄ─ū„ė├Ż¼Ą½ė╔ė┌æTąįįŁę“Ż¼▀ĆĢ■└^└m(x©┤)ĒśĢrßś▐D(zhu©Żn)äėŻ¼▀@Ģr╚¶Ė─ūāā╔Ņ^┬▌ŠĆ╣▄Ą─ļŖ┴„ĘĮŽ“Ż¼╚ńŽ┬łD╦∙╩ŠŻ¼▐D(zhu©Żn)ūėŠ═Ģ■└^└m(x©┤)ĒśĢrßśŽ“Ū░▐D(zhu©Żn)äėŻ¼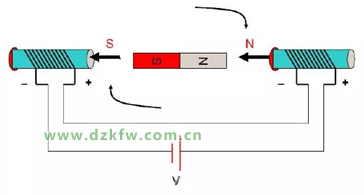
ĀŅæB(t©żi)2 ╚ń┤╦▓╗öÓĖ─ūāā╔Ņ^┬▌ŠĆ╣▄Ą─ļŖ┴„ĘĮŽ“Ż¼ā╚(n©©i)▐D(zhu©Żn)ūėŠ═Ģ■▓╗═Ż▐D(zhu©Żn)ŲüĒ┴╦ĪŻĖ─ūāļŖ┴„ĘĮŽ“Ą─▀@ę╗äėū„Ż¼Š═Įąū÷ōQŽÓĪŻča│õę╗ŠõŻ║║╬ĢrōQŽÓų╗┼c▐D(zhu©Żn)ūėĄ─╬╗ų├ėąĻPŻ¼Č°┼cŲõ╦¹╚╬║╬┴┐¤oų▒ĮėĻPŽĄĪŻ Ą┌Č■▓┐ĘųŻ║╚²ŽÓČ■śOā╚(n©©i)▐D(zhu©Żn)ūėļŖÖC ę╗░ŃüĒšfŻ¼Č©ūėĄ─╚²ŽÓ└@ĮMėąąŪą╬┬ō(li©ón)ĮYĘĮ╩Į║═╚²ĮŪ┬ō(li©ón)ĮYĘĮ╩ĮŻ¼Č°Ī░╚²ŽÓąŪą╬┬ō(li©ón)ĮYĄ─Č■Č■ī¦═©ĘĮ╩ĮĪ▒ūŅ×ķ│Żė├Ż¼▀@└’Š═ė├įō─Żą═üĒū÷éĆ║åå╬Ęų╬÷ĪŻ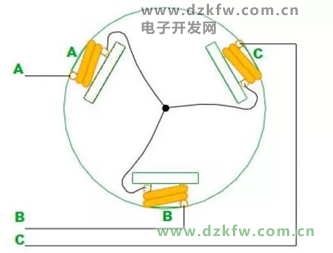
╔ŽłD’@╩Š┴╦Č©ūė└@ĮMĄ─┬ō(li©ón)ĮYĘĮ╩Į(▐D(zhu©Żn)ūė╬┤«ŗ│÷╝┘Žļ╩ŪéĆČ■śO┤┼ĶF)Ż¼╚²éĆ└@ĮM═©▀^ųąą─Ą─▀BĮė³cęįĪ░YĪ▒ą═Ą─ĘĮ╩Į▒╗┬ō(li©ón)ĮYį┌ę╗ŲĪŻš¹éĆļŖÖCŠ═ę²│÷╚²Ė∙ŠĆA, B, CĪŻ«ö╦³éāų«ķgā╔ā╔═©ļŖĢrŻ¼ėą6ĘNŪķørŻ¼Ęųäe╩ŪAB, AC, BC, BA, CA, CBūóęŌ▀@╩ŪėąĒśą“Ą─ĪŻ Ž┬├µ╬ę┐┤Ą┌ę╗ļAČ╬Ż║ABŽÓ═©ļŖ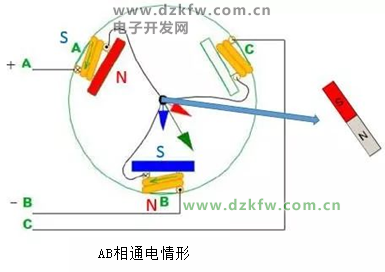
«öABŽÓ═©ļŖŻ¼ätAśOŠĆ╚”«a(ch©Żn)╔·Ą─┤┼ĖąŠĆĘĮŽ“╚ń╝t╔½╝²Ņ^╦∙╩ŠŻ¼BśO«a(ch©Żn)╔·Ą─┤┼ĖąŠĆĘĮŽ“╚ńłD╦{╔½╝²Ņ^╦∙╩ŠŻ¼─Ū├┤«a(ch©Żn)╔·Ą─║Ž┴”ĘĮŽ“╝┤×ķŠG╔½╝²Ņ^╦∙╩ŠŻ¼─Ū├┤╝┘įOŲõųąėąę╗éĆČ■śO┤┼ĶFŻ¼ätĖ∙ō■(j©┤)Ī░ųąķgĄ─▐D(zhu©Żn)ūėĢ■▒M┴┐╩╣ūį╝║ā╚(n©©i)▓┐Ą─┤┼ĖąŠĆĘĮŽ“┼c═Ō┤┼ĖąŠĆĘĮŽ“▒Ż│ųę╗ų┬Ī▒ätNśOĘĮŽ“Ģ■┼cŠG╔½╝²Ņ^╦∙╩ŠĘĮŽ“ųž║ŽĪŻų┴ė┌CŻ¼Ģ║Ģrø]╦¹╩▓├┤╩┬ĪŻ Ą┌Č■ļAČ╬Ż║ACŽÓ═©ļŖ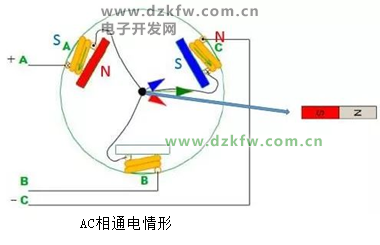
Ą┌╚²ļAČ╬Ż║BCŽÓ═©ļŖ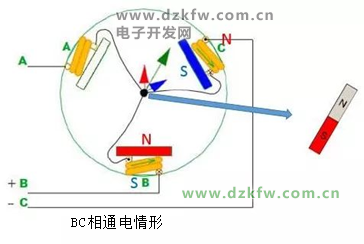
Ą┌╚²ļAČ╬Ż║BAŽÓ═©ļŖ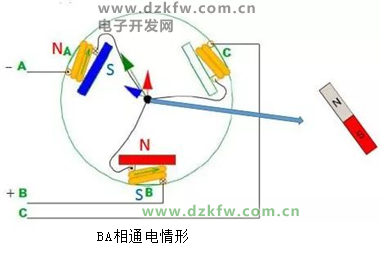
×ķ┴╦╣Ø(ji©”)╩ĪŲ¬Ę∙Ż¼╬ęéāŠ═▓╗ę╗ę╗├Ķ╩÷CACBĄ──Żą═Ż¼┤¾╝ę┐╔ęįūį╝║ŅÉ═Ųę╗Ž┬ĪŻęįŽ┬×ķųąķg┤┼ĶF(▐D(zhu©Żn)ūė)Ą─ĀŅæB(t©żi)łDŻ║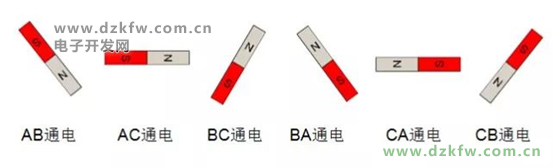
├┐éĆ▀^│╠▐D(zhu©Żn)ūėą²▐D(zhu©Żn)60Č╚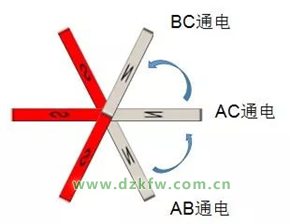
┴∙éĆ▀^│╠╝┤═Ļ│╔┴╦═Ļš¹Ą─▐D(zhu©Żn)äėŻ¼Ųõųą6┤╬ōQŽÓ Ą┌╚²▓┐ĘųŻ║╚²ŽÓČÓ└@ĮMČÓśOā╚(n©©i)▐D(zhu©Żn)ūėļŖÖC ╬ęéāį┘üĒ┐┤ę╗éĆÅ═ļs³cĄ─Ż¼łD(a)╩Ūę╗éĆ╚²ŽÓŠ┼└@ĮM┴∙śO(╚²ī”śO)ā╚(n©©i)▐D(zhu©Żn)ūėļŖÖCŻ¼╦³Ą─└@ĮM▀BŠĆĘĮ╩ĮęŖłD (b)ĪŻÅ─łD(b)┐╔ęŖŻ¼Ųõ╚²ŽÓ└@ĮMę▓╩Ūį┌ųąķg³c▀BĮėį┌ę╗ŲĄ─Ż¼ę▓ī┘ė┌ąŪą╬┬ō(li©ón)ĮYĘĮ╩ĮĪŻę╗░ŃČ°čįŻ¼ļŖÖCĄ─└@ĮMöĄ(sh©┤)┴┐Č╝║═ė└┤┼śOĄ─öĄ(sh©┤)┴┐╩Ū▓╗ę╗ų┬Ą─(▒╚╚ńė├9└@ĮM6śOŻ¼Č°▓╗╩Ū6└@ĮM6śO)Ż¼▀@śė╩Ū×ķ┴╦Ę└ų╣Č©ūėĄ─²X┼c▐D(zhu©Żn)ūėĄ─┤┼õōŽÓ╬³ī”²RĪŻ
Ųõ▀\äėĄ─įŁät╩ŪŻ║▐D(zhu©Żn)ūėĄ─NśO┼c═©ļŖ└@ĮMĄ─SśOėąī”²RĄ─▀\äė┌ģä▌Ż¼Č°▐D(zhu©Żn)ūėĄ─SśO┼c═©ļŖ└@ĮMĄ─NśOėąī”²RĄ─▀\äė┌ģä▌ĪŻ ╝┤×ķS┼cNŽÓ╗ź╬³ę²Ż¼ūóęŌĖ·ų«Ū░Ą─Ęų╬÷ĘĮĘ©ėąę╗Č©Ą─ģ^(q©▒)äeĪŻ ║├░╔Ż¼▀Ć╩Ūį┘Ä═┤¾╝ęĘų╬÷ę╗Ž┬░╔Ż¼ Ą┌ę╗ļAČ╬Ż║ABŽÓ═©ļŖ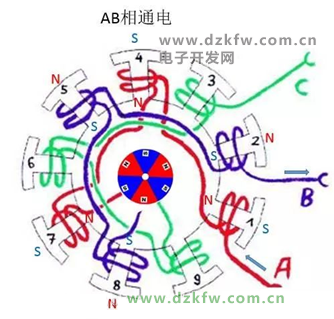
Ą┌Č■ļAČ╬Ż║ACŽÓ═©ļŖ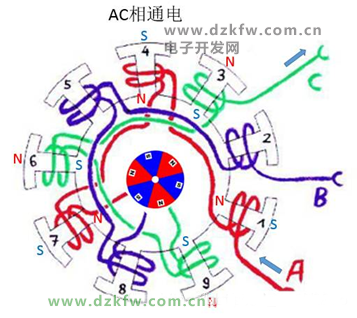
Ą┌╚²ļAČ╬Ż║BCŽÓ═©ļŖ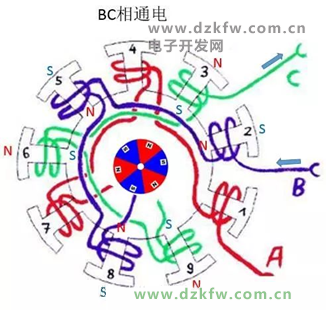
Ą┌╦─ļAČ╬Ż║BA═©ļŖ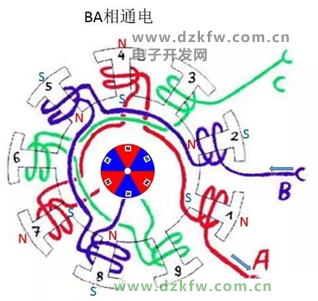
Ą┌╬ÕļAČ╬Ż║CA═©ļŖ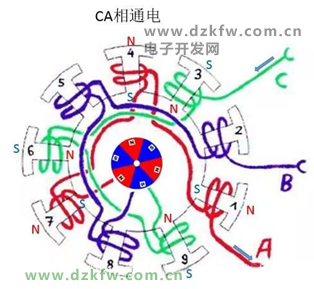
Ą┌┴∙ļAČ╬Ż║CB═©ļŖ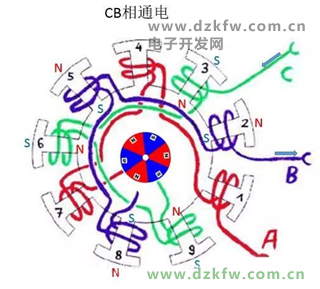
ęį╔Ž×ķ┴∙éĆ▓╗═¼Ą─═©ļŖĀŅæB(t©żi)Ż¼ŲõųąĮø(j©®ng)Üv┴╦╬ÕéĆ▐D(zhu©Żn)äė▀^│╠ĪŻ├┐éĆ▀^│╠×ķ20Č╚ĪŻ
Ą┌╦─▓┐ĘųŻ║═Ō▐D(zhu©Żn)ūė¤o╦óų▒┴„ļŖÖC ┐┤═Ļ┴╦ā╚(n©©i)▐D(zhu©Żn)ūė¤o╦óų▒┴„ļŖÖCĄ─ĮYśŗŻ¼╬ęéāüĒ┐┤═Ō▐D(zhu©Żn)ūėĄ─ĪŻŲõģ^(q©▒)äeŠ═į┌ė┌Ż¼═Ō▐D(zhu©Żn)ūėļŖÖCīóįŁüĒ╠Äė┌ųąą─╬╗ų├Ą─┤┼õōū÷│╔ę╗Ų¼Ų¼Ż¼┘NĄĮ┴╦═ŌÜż╔ŽŻ¼ļŖÖC▀\ąąĢrŻ¼╩Ūš¹éĆ═ŌÜżį┌▐D(zhu©Żn)Ż¼Č°ųąķgĄ─ŠĆ╚”Č©ūė▓╗äėĪŻ═Ō▐D(zhu©Żn)ūė¤o╦óų▒┴„ļŖÖC▌^ā╚(n©©i)▐D(zhu©Żn)ūėüĒšfŻ¼▐D(zhu©Żn)ūėĄ─▐D(zhu©Żn)äėæT┴┐ę¬┤¾║▄ČÓ(ę“×ķ▐D(zhu©Żn)ūėĄ─ų„ę¬┘|(zh©¼)┴┐Č╝╝»ųąį┌═ŌÜż╔Ž)Ż¼╦∙ęį▐D(zhu©Żn)╦┘▌^ā╚(n©©i)▐D(zhu©Żn)ūėļŖÖCę¬┬²Ż¼═©│ŻKVųĄį┌Äū░┘ĄĮÄūŪ¦ų«ķgĪŻę▓╩Ū║Į─Żų„ę¬▀\ė├Ą─¤o╦óļŖÖC Ēś▒Ńå¬Ó┬ę╗Ž┬░╔ĪŻ¤o╦óļŖÖCKVųĄČ©┴x×ķŻ║▐D(zhu©Żn)╦┘/VŻ¼ęŌ╦╝×ķ▌ö╚ļļŖē║├┐į÷╝ė1Ę³╠žŻ¼¤o╦óļŖÖC┐š▐D(zhu©Żn)▐D(zhu©Żn)╦┘į÷╝ėĄ─▐D(zhu©Żn)╦┘ųĄĪŻ▒╚╚ńšfŻ¼ś╦ĘQųĄ×ķ1000KVĄ─═Ō▐D(zhu©Żn)ūė¤o╦óļŖÖCŻ¼į┌11Ę³Ą─ļŖē║Śl╝■Ž┬Ż¼ūŅ┤¾┐š▌d▐D(zhu©Żn)╦┘╝┤×ķŻ║11000rpm(rpmĄ─║¼┴x╩ŪŻ║▐D(zhu©Żn)/ĘųńŖ)ĪŻ ═¼ŽĄ┴ą═¼═Ōą╬│▀┤ńĄ─¤o╦óļŖÖCŻ¼Ė∙ō■(j©┤)└@ŠĆįčöĄ(sh©┤)Ą─ČÓ╔┘Ż¼Ģ■▒Ē¼F(xi©żn)│÷▓╗═¼Ą─KV╠žąįĪŻ└@ŠĆįčöĄ(sh©┤)ČÓĄ─Ż¼KVųĄĄ═Ż¼ūŅĖ▀▌ö│÷ļŖ┴„ąĪŻ¼┼ż┴”┤¾;└@ŠĆįčöĄ(sh©┤)╔┘Ą─Ż¼KVųĄĖ▀Ż¼ūŅĖ▀▌ö│÷ļŖ┴„┤¾Ż¼┼ż┴”ąĪĪŻ╬ęŽ╚Ū░£yįć▀^┤®įĮÖC2204ļŖÖCĄ─śOŽ▐ļŖ┴„Ż¼å╬ļŖÖC─▄▒ļ╔Ž25AŻ¼Č°2212ŽĄ┴ąļŖÖC15AČ╝╔Ž▓╗┴╦ĪŻ ═Ō▐D(zhu©Żn)ūė¤o╦óų▒┴„ļŖÖCĄ─ĮYśŗ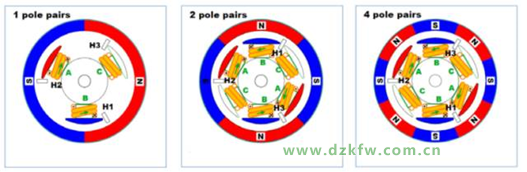
Ęų╬÷ĘĮĘ©ę▓║═ā╚(n©©i)▐D(zhu©Żn)ūėļŖÖCŅÉ╦ŲŻ¼┤¾╝ę┐╔ęįūį╝║Ęų╬÷ę╗Ž┬Ż¼Ė∙ō■(j©┤)ėę╩ų┬▌ą²Č©└Ē┼ąöÓŠĆ╚”Ą─N/SśOŻ¼▐D(zhu©Żn)ūėė└┤┼¾wĄ─NśO┼cČ©ūė└@ĮMĄ─SśOėąī”²R(╬³ę²)Ą─┌ģä▌Ż¼▐D(zhu©Żn)ūėė└┤┼¾wĄ─SśO┼cČ©ūė└@ĮMĄ─NśOėąī”²R(╬³ę²)Ą─┌ģä▌Ż¼Å─Č°“ī(q©▒)äėļŖÖC▐D(zhu©Żn)äėĪŻ Įø(j©®ng)Ąõ¤o╦óļŖÖC2212 1000kvļŖÖCĮYśŗĘų╬÷ĪŻ
łD×ķDJI 2312SļŖÖC║═XXD 2212ļŖÖCĄ─(ĮŌŲ╩łD) ŲõĮYśŗ╚ńŽ┬Ż║Č©ūė└@ĮM╣╠Č©į┌Ąūū∙╔ŽŻ¼▐D(zhu©Żn)▌S║══ŌÜż╣╠Č©į┌ę╗Ųą╬│╔▐D(zhu©Żn)ūėŻ¼▓Õ╚ļČ©ūėųąķgĄ─▌S│ąĪŻ
łD×ķxxd2212ŠĆ╚”▓ĮŌłD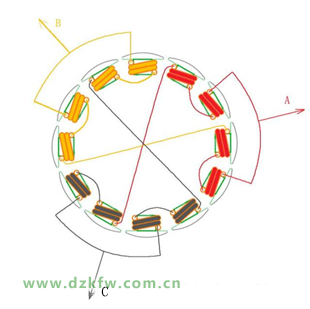
łD×ķ12└@ĮM14śO(╝┤7ī”śO)Ż¼ļŖÖC└@ĮM└@░l(f©Ī)łD ║¾├µ«ŗ│÷┴╦6ĘNā╔ŽÓ═©ļŖĄ─Ūķą╬Ż¼┐╔ęį┐┤│÷Ż¼▒M╣▄└@ĮM║═┤┼śOĄ─öĄ(sh©┤)┴┐┐╔ęįėąįSČÓĘNūā╗»Ż¼Ą½Å─ļŖš{(di©żo)┐žųŲĄ─ĮŪČ╚┐┤Ż¼Ųõ═©ļŖ┤╬ą“ŲõīŹ╩ŪŽÓ═¼Ą─Ż¼ę▓Š═╩ŪšfŻ¼▓╗╣▄═Ō▐D(zhu©Żn)ūė▀Ć╩Ūā╚(n©©i)▐D(zhu©Żn)ūėļŖÖCŻ¼Č╝ū±čŁAB->AC->BC->BA->CA->CBĄ─Ēśą“▀Mąą═©ļŖōQŽÓĪŻ«ö╚╗Ż¼╚ń╣¹─ŃŽļūīļŖÖCĘ┤▐D(zhu©Żn)Ą─įÆŻ¼ļŖūėĘĮĘ©╩Ū░┤Ą╣▀^üĒĄ─┤╬ą“═©ļŖ;╬’└ĒĘĮĘ©ų▒Įėī”š{(di©żo)╚╬ęŌā╔Ė∙ŠĆŻ¼╝┘įOA║═Bī”š{(di©żo)Ż¼─Ū├┤Ēśą“Š═╩ŪBA->BC->AC->AB->CB->CAŻ¼┤¾╝ęėąø]ėą░l(f©Ī)¼F(xi©żn)▀@└’Ēśą“Š══Ļ╚½Ą╣▀^üĒ┴╦ĪŻ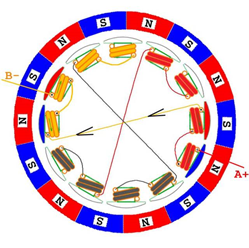
ABŽÓ═©ļŖ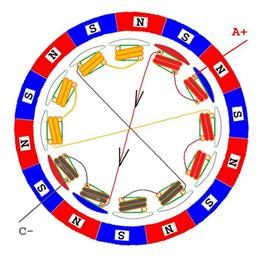
ACŽÓ═©ļŖ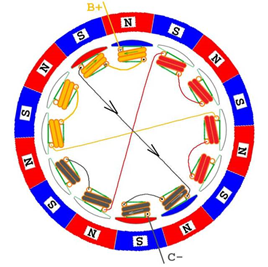
BCŽÓ═©ļŖ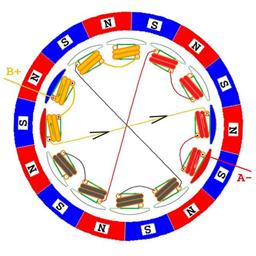
BAŽÓ═©ļŖ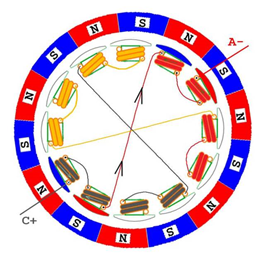
CAŽÓ═©ļŖ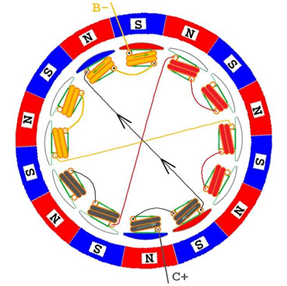
CBŽÓ═©ļŖ
꬚f├„ę╗Ž┬Ą─╩ŪŻ¼ė╔ė┌├┐Ė∙ę²│÷ŠĆ═¼ĢrĮė╚ļā╔éĆ└@ĮMŻ¼╦∙ęįļŖ┴„╩ŪĘųā╔┬Ęū▀Ą─ĪŻ▀@└’×ķ╩╣å¢Ņ}▒M┴┐║åå╬╗»Ż¼Ž┬├µÄūéĆłDųąų╗«ŗ│÷┴╦ų„ę¬ę╗┬ĘĄ─ļŖ┴„ĘĮŽ“Ż¼▀Ćėąę╗┬ĘļŖ┴„╬┤«ŗ│÷Ż¼┴Ēę╗┬ĘļŖ┴„Ą─Š▀¾wŪķørĘ┼į┌║¾├µ▀MąąĘų╬÷Ż¼╔µ╝░ĄĮļŖ┬ĘÖz£yōQŽÓ╬╗ų├ĪŻ
ėą╦ó±R▀_Ą─įŁ└Ē ¤o╦óļŖÖC╣żū„įŁ└ĒĮķĮB
ū„š▀Ż║ž²├¹ ╬─š┬üĒį┤Ż║▒ŠšŠįŁäō(chu©żng) ³cō¶öĄ(sh©┤)Ż║ Ė³ą┬ĢrķgŻ║2022-09-17
TagsŻ║ėą╦óļŖÖC,¤o╦óļŖÖC,╣żū„įŁ└Ē
ž¤╚╬ŠÄ▌ŗŻ║adminŽÓĻP╬─š┬┴ą▒Ē
╦┼Ę■“ī(q©▒)äėŲ„Ą─╣żū„įŁ└Ē ╦┼Ę■▀MĮoŽĄĮy(t©»ng)Ą─ā×(y©Łu)³c─µūāļŖ║ĖÖCĄ─╗∙▒Š╣żū„įŁ└Ē_ļŖ║ĖÖCų«IGBTŽĄ┴ą║ĖÖC╣żū„įŁ└Ē
▌x╣ŌĘ┼ļŖĘ┼ļŖĢr╩▓├┤įŁ└ĒŻ┐
│¶č§░l(f©Ī)╔·Ų„╣żū„įŁ└Ē
ļŖ║ĖÖCįŁ└Ē┼c╩╣ė├╝╝Ū╔ ļŖ║ĖÖC╣żū„įŁ└Ē
ūāŅlŲ„ųŲäėļŖ┬Ę╣żū„įŁ└Ē
┴∙ĘN│Żė├└^ļŖŲ„Ą─╣żū„įŁ└Ēšf├„
įŁļŖ│ž╣żū„įŁ└Ē č§╗»▀ĆįŁĘ┤æ¬ įŁļŖ│žĄ─┼ąöÓĘĮĘ©
įŁļŖ│žĄ─╣żū„įŁ└Ē ¹}ś“Ą─ū„ė├
Į^ŠēļŖūĶ£yįćāxŻ║šūÜW▒ĒĄ─ĮYśŗ╝░╣żū„įŁ└Ē ōu▒ĒšūÜW▒Ē╣żū„įŁ└Ēäė«ŗ
ą²▐D(zhu©Żn)ūāē║Ų„Ą─ĮYśŗ║═╣żū„įŁ└Ē
╩▓├┤╩ŪBUCKļŖ┬Ę_BUCKļŖ┬Ę╣żū„įŁ└Ē_BUCK ļŖ┬ĘłD
¤o╦óļŖÖC┼c╠╝╦óļŖÖCĄ─ģ^(q©▒)äe ¤o╦óļŖÖC ėą╦óļŖÖCģ^(q©▒)äe
ūāē║Ų„Ą─╗∙▒ŠĮYśŗ┼c╣żū„įŁ└Ē ūāē║Ų„ĮYśŗŻ¼ą─╩Įūāē║Ų„║═Üż╩Įūāē║Ų„ĪŁ
ĪŠūāē║Ų„Ī┐┐žųŲūāē║Ų„ū„ė├╝░╣żū„įŁ└Ē
ļŖ║ĖÖC╣żū„įŁ└ĒĘĮ┐“ļŖ┬ĘłD ļŖ║ĖÖC╣żū„įŁ└ĒĄ─╣żū„įŁ└Ē
═Č╚ļ╩Įę║╬╗ėŗĄ─╣żū„įŁ└Ē
ļŖ┤┼┴„┴┐ėŗ╣żū„įŁ└Ē Ę©└ŁĄ┌ļŖ┤┼Ėąæ¬Č©┬╔
╝ėرŲ„ņF╗»Ų¼Ą─╣żū„įŁ└Ē
╩▓├┤╩ŪÅŖ┼┼╩Į¤ß╦«Ų„ ÅŖ┼┼╩Į¤ß╦«Ų„ārĖ±╝░╣żū„įŁ└Ē
Į╗┴„ŃQą═▒Ē£y┴┐įŁ└ĒłDĮŌ Į╗┴„ŃQ▒Ē£y┴┐ļŖ┴„Ą─įŁ└Ē ŃQ▒ĒĄ─╣żū„įŁĪŁ
Ė¶ļxŲ„║═░▓╚½¢┼Ą─╣żū„įŁ└Ē╝░įŁ└ĒłD
ūāŅlŲ„ė╔──Äū┤¾▓┐ĘųĮM│╔ ūāŅlŲ„ĮM│╔▓┐Ęų
¤ß╩ĮÜŌ¾w┘|(zh©¼)┴┐┴„┴┐ėŗ╣żū„įŁ└Ē
ūāŅlŲ„╣żū„įŁ└Ē┼cĮYśŗłDĮŌ
å╬ŽÓļŖ▒Ē╣żū„įŁ└Ē_å╬ŽÓļŖ▒ĒĮėŠĆįŁ└ĒłD_ÖCąĄ╩Įå╬ŽÓļŖ▒ĒĄ─ĮYśŗ
═©╦ūĄžųvĮŌėŗ╦ŃÖC╣żū„įŁ└Ē
ų▒ŠĆļŖÖC_ŠĆąįļŖÖCĄ─╣żū„įŁ└ĒįöĮŌ
░ļī¦¾wųŲ└õŲ¼╣żū„įŁ└Ē╝░╩╣ė├
▀\╦ŃĘ┼┤¾Ų„╣żū„įŁ└Ē╩Ū╩▓├┤?
[ ▓ķ┐┤╚½▓┐ ] ŠW(w©Żng)ėčįušō
═Ų╦]╬─š┬
- Īż 17ÅłĮø(j©®ng)ĄõäėæB(t©żi)łDĦ─·┐┤Č«ļŖäėÖC▀\ąąįŁ└ĒĪŁ
- Īż ėą╦ó±R▀_Ą─įŁ└Ē ¤o╦óļŖÖC╣żū„įŁ└ĒĮķĮB
- Īż łD╬─įöĮŌļŖÖC└@ŠĆ╣ż╦ć┼cĘĮĘ©_ŠĆ╚” ļŖÖCĪŁ
- Īż ūāŅl▒├Ą─┴„┴┐┼cŅl┬╩ėą╩▓├┤ĻPŽĄ ūāŅlŲ„ĪŁ
- Īż ļŖÖC┤┼śOī”öĄ(sh©┤)į§├┤┐┤Ż┐ļŖÖC▐D(zhu©Żn)╦┘║═śOī”öĄ(sh©┤)
- Īż ╚²ŽÓ«É▓ĮļŖäėÖCĄ─▐D(zhu©Żn)äėįŁ└Ē śOī”öĄ(sh©┤) ▐D(zhu©Żn)▓ŅĪŁ
- Īż 36▓█6śOļŖÖCĄ─ĮėŠĆłD š╣ķ_łD
- Īż ╚²ŽÓļŖÖC└@ŠĆ ╚²ŽÓ24▓█2śO═¼ą─╩ĮŪČŠĆš╣ĪŁ
- Īż ╚²ŽÓļŖÖC4śO24▓█└@ĮMĮėŠĆłD ╚²ŽÓļŖÖC╣żĪŁ
- Īż ļŖÖCŠSą▐Ż║į§śė▓ąČļŖÖC▌S│ą?ļŖÖC▌S│ą│ŻĪŁ
- Īż «É▓ĮļŖÖC└@ĮMĄ─ŪČŠĆĘĮĘ©
- Īż ─Ńéāų¬Ą└æ¬ė├ūŅÅVĘ║Ą─ļŖäėÖC╩Ū──ą®å߯┐ĪŁ
- Īż ×ķ╩▓├┤ėąĄ─å╬ŽÓļŖäėÖCø]ėąļŖ╚▌Ż┐╩▓├┤╩ŪĪŁ
- Īż ĪŠłDĪ┐«É▓ĮļŖÖCļpīė└@ĮM(ļpīė»B└@ĮM║═▓©ĪŁ
- Īż ļŖÖC▀M╦«║¾Ą─║åå╬š³Š╚┤ļ╩®
- Īż ļŖÖC▀M╦«┴╦į§├┤▐kŻ┐ļŖäėÖC▀M╦«ŠSą▐
- Īż ļŖäėÖCļŖÖC─Żą═┼c┤┼ł÷Ą─ĻPŽĄ
- Īż ╚ń║╬ģ^(q©▒)Ęųėą╦óļŖÖC¤o╦óļŖÖCŻ┐ėą╦óļŖÖC┼cĪŁ
- Īż ┼ąöÓļŖäėÖCČ©ūė└@ĮM╩ū─®Č╦Ą─ĘĮĘ©Ż¼Č©ūėĪŁ
- Īż ╚²ŽÓ«É▓ĮļŖäėÖC═¼├¹Č╦į§├┤┼ąäeŻ┐
- Īż ļŖäėÖCĄ─ŠSūo┼cą▐└Ēėą──ą®╝╝Ū╔
- Īż ļŖÖCą▐└ĒĄ─╚ļķT╝╝Ū╔║═ų¬ūR
- Īż «É▓ĮļŖäėÖC▀\ąąĢr▌S│ą▀^¤ß
- Īż ļŖäėÖCĄ─└@ĮMČ╠┬Ę╣╩šŽ¼F(xi©żn)Ž¾╝░╠Ä└ĒĘĮĘ©
- Īż ļŖäėÖCį┌Ųäė║═▀\ąą▀^│╠ųą╚▌ęū░l(f©Ī)╔·Ą─╣╩ĪŁ
- Īż ļŖäėÖCĄ─ŠSą▐╝╝Ū╔
- Īż łDĮŌ╚²ŽÓļŖäėÖC└@ŠĆĘĮĘ©
- Īż ė└┤┼═¼▓ĮļŖÖC
- Īż ĪŠäė«ŗłDĮŌĪ┐ą┬─▄į┤Ų¹▄ć╔ŽĄ─ė└┤┼═¼▓ĮļŖĪŁ
- Īż ĪŠäė«ŗč▌╩ŠĪ┐╚²ŽÓ«É▓ĮļŖäėÖC╣żū„įŁ└Ē
ūŅą┬═Ų╦]
¤ßķT╬─š┬
- Īż 17ÅłĮø(j©®ng)ĄõäėæB(t©żi)łDĦ─·┐┤Č«ļŖäėÖC▀\ąąįŁ└ĒĪŁ
- Īż ╚²ŽÓļŖÖC└@ĮMūĶųĄ×ķČÓ╔┘▓┼╦Ńš²│ŻŻ┐
- Īż å╬ŽÓļŖÖC║═╚²ŽÓļŖÖCŻ¼╦«▒├24▓█ļŖÖCŠĆ╚”ĪŁ
- Īż ĪŠ═Ų╦]Ī┐ļŖäėÖCš²Ę┤▐D(zhu©Żn)┐žųŲļŖ┬ĘłDīŹ╬’ĮėĪŁ
- Īż ļŖÖCą═╠¢╚½ĮŌ╬÷Ż║ūų─Ė║═┤·╠¢Ą─║¼┴x╩Ū╩▓ĪŁ
- Īż ļŖÖCŅl┬╩ĪóļŖÖCśOöĄ(sh©┤)ĪóļŖÖC▐D(zhu©Żn)╦┘ų«ķgĻPŽĄĪŁ
- Īż ═¼▓ĮļŖäėÖCäŅ┤┼čbų├Ą─╣żū„įŁ└Ē
- Īż ļŖÖCśOöĄ(sh©┤)┼c╣Ø(ji©”)ŠÓĄ─ĻPŽĄ╝░╚ń║╬ėŗ╦ŃŻ┐
- Īż šųśOļŖÖC╣żū„įŁ└Ē
- Īż ╠╝╦ó┤“╗╣╩šŽŻ¼ļŖÖC╠╝╦ó┤“╗įŁę“║═╠Ä└ĒĪŁ
- Īż Į╗┴„ļŖÖCļpīė└@ĮM║═å╬īė└@ĮMėą╔Čģ^(q©▒)äeŻ┐
- Īż ĪŠłDĪ┐«É▓ĮļŖÖCļpīė└@ĮM(ļpīė»B└@ĮM║═▓©ĪŁ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū