
運動控制器是一種電子設備,通常與運動控制軟件配合使用,用于控制機器人、數控機床和其他自動化設備移動或執行各種任務。運動控制技術是數控機床的關鍵技術,其技術水平的高低將直接影響一個國家裝備制造業的發展水平。目前,多軸伺服控制器越來越多地運用在運動控制系統中,具有較高的集成度和靈活性,可實時完成運動控制過程中復雜的邏輯處理和控制算法,能實現多軸高速高精度的伺服控制。
運動控制器的工作原理是將預定的控制方案、規劃指令轉變成期望的機械運動,實現機械運動精確的位置(點位、運動軌跡、插補等)控制、速度控制、加速度控制、轉矩或力的控制。
廣義的運動控制器按結構分類可分為PLC可編程邏輯控制器、單片機控制器、獨立式運動控制器、基于PC機的運動控制卡、網絡控制器等。運動控制板與plc的連接示例如下:
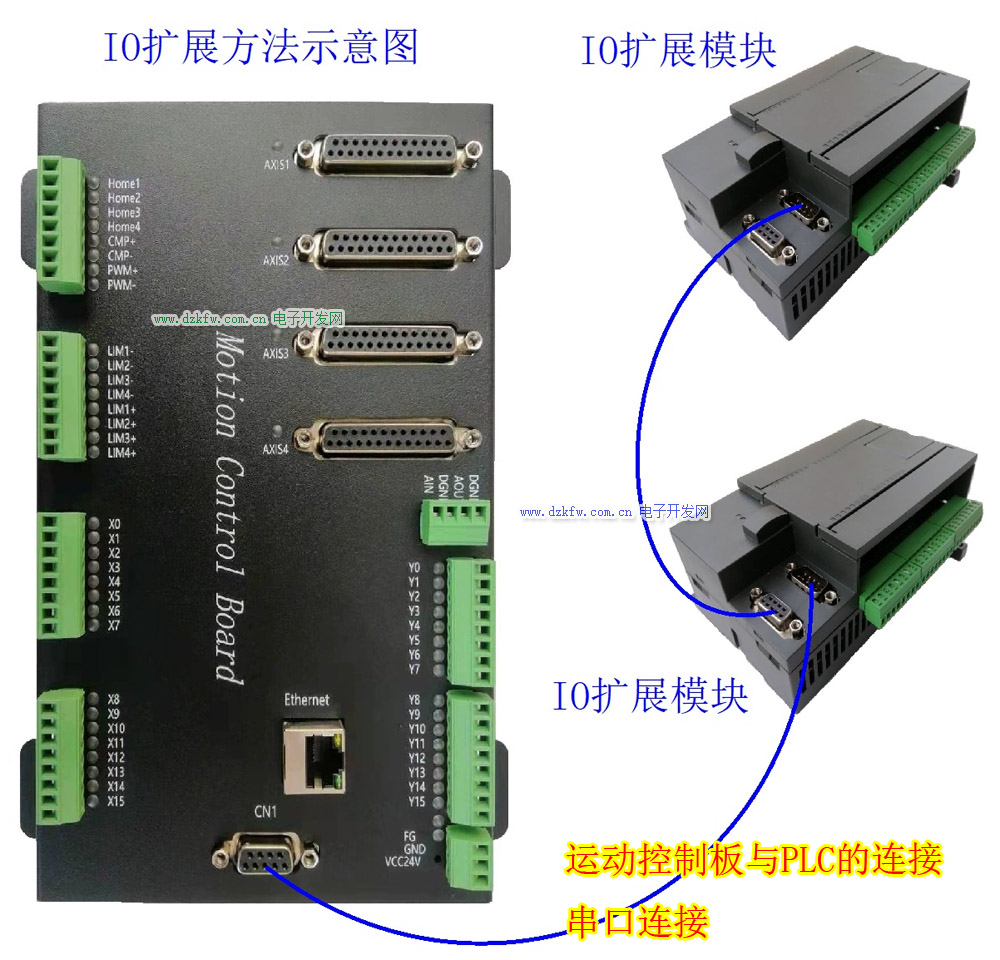
通過擴展以后,一個PC最多可以控制8、16、24、32......2000個軸、16、32、64、128、256......128000個輸入、128000個輸出,可滿足所有軸數量場合!
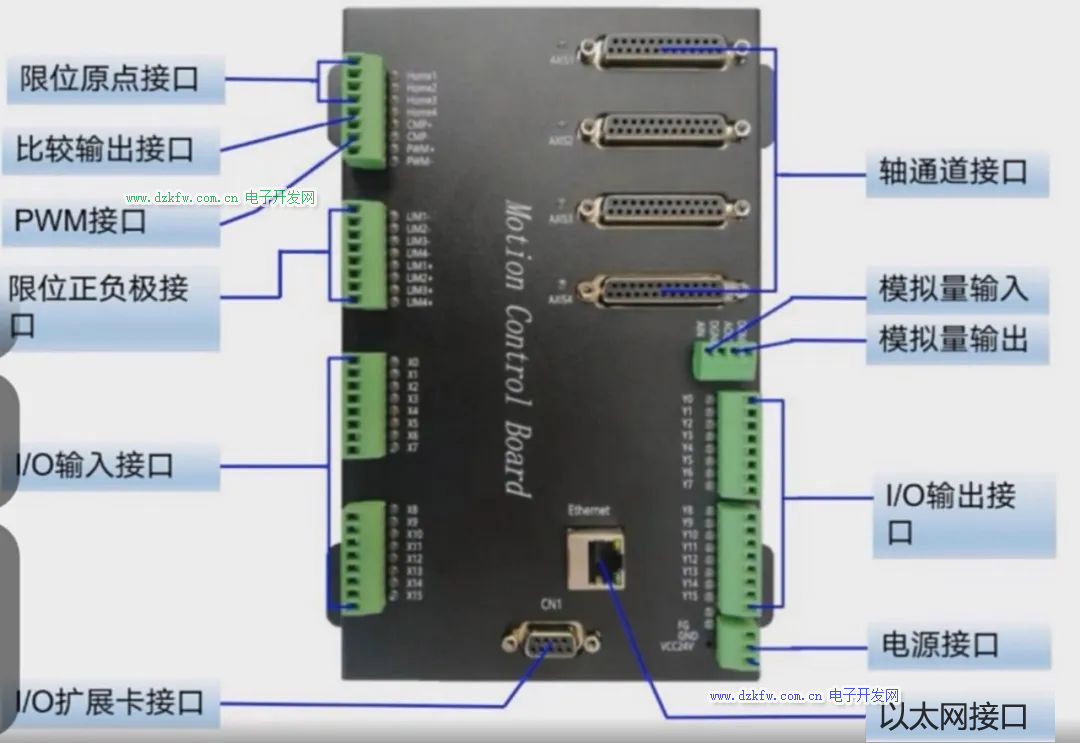
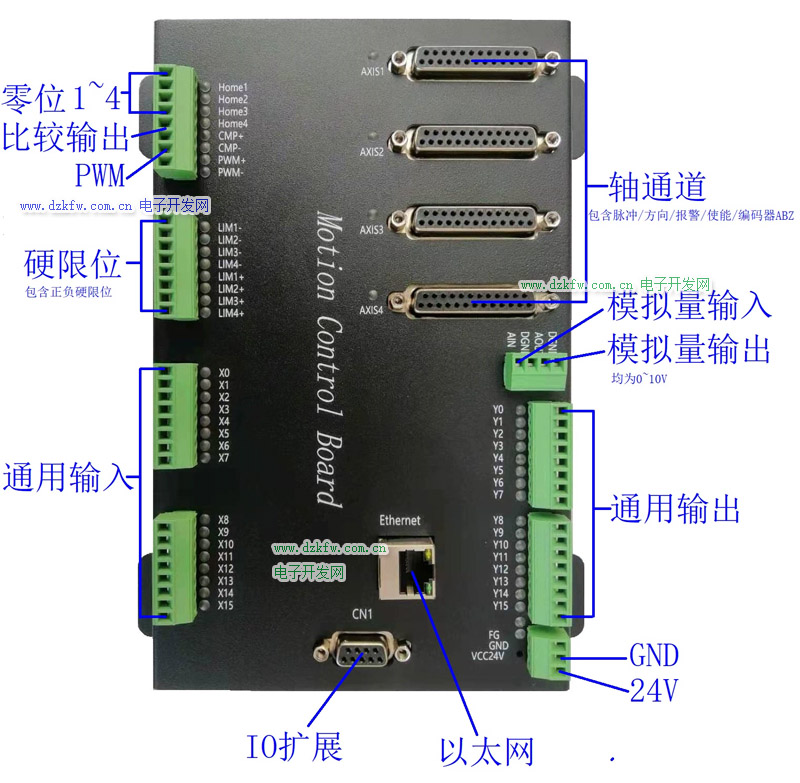
一、硬件資源
1、板卡采用24V 直流電源供電。
2、控制卡共有16 路通用輸入,全部光耦隔離。
3、控制卡共有16 路通用輸出,可直接驅動繼電器控制外部IO負載,比如真空電磁閥、氣缸.......等等
4、控制卡共有4路零位信號,全部光耦隔離。
5、控制卡共有路正限位信號,4路負限位信號,全部光耦隔離。
6、控制卡路軸通道,可控制步進電機、伺服電機。
7、控制卡每路軸通道都包含脈沖、方向、正交編碼器、Z相索引、使能、報警、復位等信號接口。
8、控制卡每個軸通道脈沖輸出最高頻率達2MHz。
9、控制卡的每個軸通道都支持編碼器反饋。
10、支持硬件捕獲、電子齒輪/電子凸輪、比較輸出、PWM
11、帶模擬量版本的控制卡支持模擬量(1路DA和1路AD,0~10V)
不夠用還有專用的模擬量擴展模塊
二、軟件資源
1、控制卡提供了VC ++、C#下的動態庫,用戶可利用動態庫提供的API 完成板卡打開、關閉、IO 輸入、IO
輸出、步進/伺服電機速度控制、步進/伺服電機點位運動控制。
2、控制卡支持2軸、3軸直線插補,X/Y或者X/Z或者Y/Z任意平面圓弧插補。
3、控制卡支持連續小線段及圓弧軌跡運動,支持速度前瞻。
4、帶模擬量版本的控制卡支持模擬量(1路DA和1路AD,0~10V)
不夠用還有專用的模擬量擴展模塊
5、支持PWM
6、支持比較輸出功能(脈沖比較輸出或者編碼器比較輸出)
7、支持高速硬件捕獲
8、支持自動回零
9、帶專用正負硬限位和專用零位信號
說明書下載鏈接: https://pan.baidu.com/s/1sHlxs2am0E53HWlI2TrlYw
光盤下載鏈接 : https://pan.baidu.com/s/1UrvHWhHm6QQ0yKdGqQEcgQ
運動控制器主要分為三類,分別是PC-based(工控計算機)、專用控制器、PLC。其中,PC-based 運動控制器是一種基于個人計算機的開放式運動控制系統,它具有靈活性和可擴展性,但需要較高的技術水平;專用控制器是一種針對特定應用場景而設計的專用控制器,它具有較高的可靠性和穩定性;PLC 運動控制器則是一種基于可編程邏輯門陣列(PLC)的通用型控制器,它具有較高的性價比和適用范圍廣的特點。
運動控制器和PLC都是自動化控制系統中的重要組成部分,你中有我,我中有你,但它們的應用場景和側重功能有所不同。運動控制器主要用于控制步進電機、伺服電機等運動部件,而PLC則主要用于控制邏輯電路、人機界面等。 它們的區別如下:
控制對象不同:運動控制器主要控制運動部件,而PLC主要控制邏輯電路和人機界面。
控制方式不同:運動控制器通常采用脈沖輸出或方向輸出等方式進行控制,而PLC通常采用開關量輸入和輸出進行控制。
編程語言不同:運動控制器通常使用C或C++等高級語言進行編程,而PLC通常使用Ladder Diagram(梯形圖)等低級語言進行編程。
在實際應用中,運動控制器和PLC可以結合使用,以實現更復雜的運動控制任務。例如,可以使用PLC作為主控制器,將運動控制器作為從控制器來實現更高級別的運動控制。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底