
序言:
雷達(dá)(Radar)是利用定向天線向外發(fā)射電磁波,然后根據(jù)目標(biāo)反射的電磁波信號(hào)特征,來(lái)獲取目標(biāo)的距離、位置、速度等信息。通常雷達(dá)測(cè)距的方法有三種:脈沖法測(cè)距、調(diào)頻連續(xù)波法測(cè)距、相位法測(cè)距;常用的為前兩種。脈沖法測(cè)距分辨率和脈沖寬度有關(guān),要達(dá)到更高的分辨率困難比較大;而調(diào)頻連續(xù)波雷達(dá),可以用相對(duì)簡(jiǎn)單的硬件,實(shí)現(xiàn)高精度距離測(cè)量,并且可以同時(shí)測(cè)量目標(biāo)的速度信息。
FMCW雷達(dá)基本原理:
調(diào)頻連續(xù)波雷達(dá)(FMCW)的基本原理如下圖所示(以三角波為例):
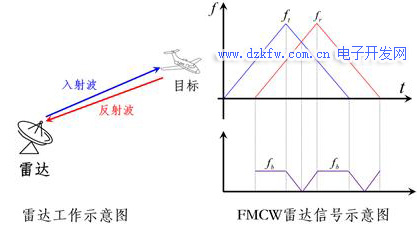
FMCW雷達(dá)基本原理
雷達(dá)發(fā)射頻率隨時(shí)間變化的三角波信號(hào),該信號(hào)經(jīng)目標(biāo)反射之后被雷達(dá)接收。因?yàn)榘l(fā)射信號(hào)和接受信號(hào)之間有一定的時(shí)間差,并且發(fā)射信號(hào)的頻率是隨時(shí)間變化的;所以在發(fā)射信號(hào)和接收信號(hào)之間有一定的頻率差;距離越大、頻差就越大。通過(guò)頻差和距離之間的某種關(guān)系,可以測(cè)得目標(biāo)的距離。
另外,如果是相對(duì)雷達(dá)運(yùn)動(dòng)物體,因?yàn)槎嗥绽招?yīng),會(huì)有一定的額外頻偏;通過(guò)提取這個(gè)額外的頻偏、并和目標(biāo)速度取得一定的關(guān)系,就可以得到目標(biāo)的速度信息
靜止目標(biāo)的距離測(cè)量:
圖(2)為FMCW雷達(dá)信號(hào)示意圖;設(shè)發(fā)射的三角波為 、反射回來(lái)的波為 ,目標(biāo)和雷達(dá)之間距離為R、發(fā)射波和接收波之間的延遲為 ;則任一時(shí)刻發(fā)射波和接收波的頻率差為:
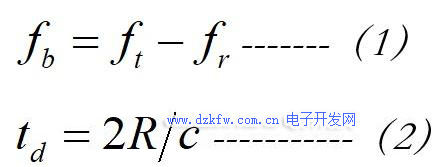
設(shè)ts為調(diào)頻波周期的一半、fspan為調(diào)頻波掃頻帶寬,根據(jù)如圖有如下關(guān)系:
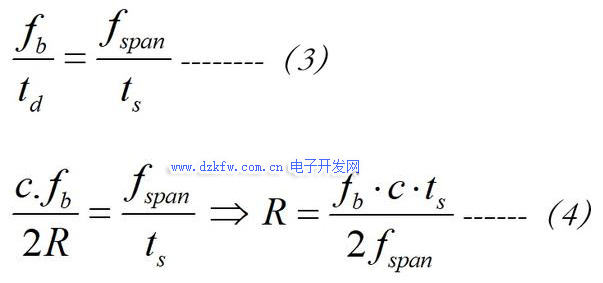
公式根據(jù)反射波和入射波的頻率差fb,可以得到距離信息。根據(jù)掃頻周期和掃頻帶寬,能計(jì)算出每赫茲頻率差、反映的距離信息。從公式可見(jiàn),掃頻帶寬越寬,距離分辨率越高;同樣掃頻帶寬下,載波頻率越高(ts越小)、距離分辨率越高。在其他參數(shù)固定的情況下,距離和差頻成函數(shù)關(guān)系。
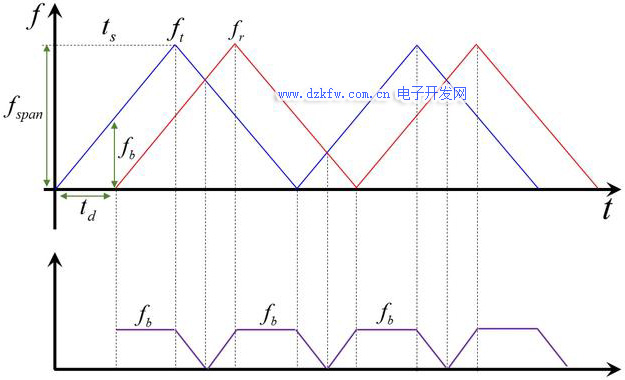
圖二:靜止目標(biāo)的FMCW雷達(dá)信號(hào)示意圖
運(yùn)動(dòng)目標(biāo)的距離、速度測(cè)量:
如果被測(cè)物體是移動(dòng)的,考慮到多普勒效應(yīng),反射波會(huì)有一定頻移,則入射波和反射波的頻率差將會(huì)不再恒定(如下圖)。設(shè)多普勒頻移為fd,則有:
設(shè)發(fā)射信號(hào)的中心頻率為 ,則多普勒頻移為:

其中v為被測(cè)物體的速度。
根據(jù)前面公式(4)有:
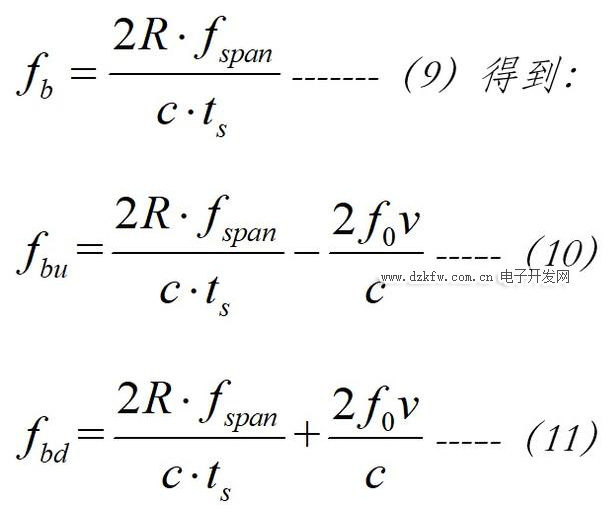
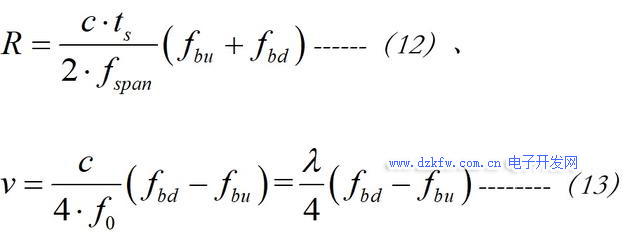
公式(10)、(11)分別相加和相減得到:
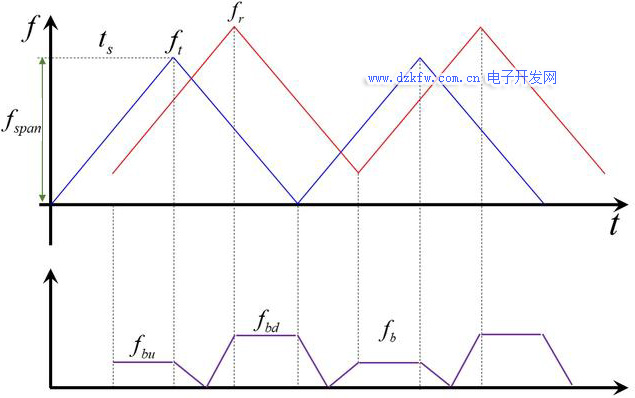
圖三:運(yùn)動(dòng)目標(biāo)FMCW信號(hào)示意圖
至此,得到了目標(biāo)距離和目標(biāo)速度與雷達(dá)反射信號(hào)的關(guān)系。
 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底