
運動控制其本質是控制電機,實現其對角位移,轉矩,轉速等物理量。 運動自動化控制一般針對某個產品,由機械、軟件、電氣等模塊組成,如精密數控機械、機床、機器人、無人機、運動平臺等等。運動控制主要針對某個產品的個體控制,它可以是某個系統內的某個設備。
過程控制與運動控制在很多場合已經結合在一起共同控制大型生產線。
什么是自動化過程控制?
利用plc控制器收集傳感器反饋的數據,并分析處理這些數據后,調節優化及控制各種設備,以提高生產的效率。其控制的對象一般是各類水泵、風機、電動閥門等。
過程自動化一般用于環保行業如污水、廢氣處理,節能行業,對工業生產中的各類負載設備進行智能調節以保證其運行于最佳狀態,以達到節能的目的。
整個系統一般由plc控制柜、配電柜以及控制程序,各傳類感器,組態軟件,監控系統等組成。
過程控制主要用于傳統工業自動化領域中,是一種大系統控制,控制對象比較多,如一條生產線。
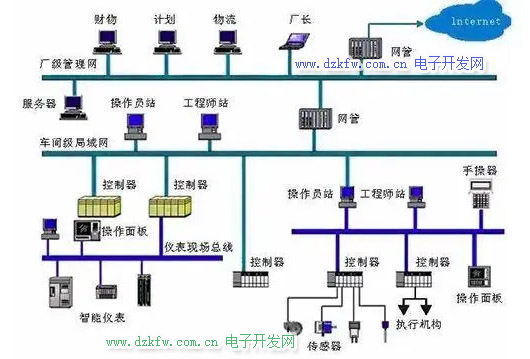
▲某企業的自動化過程控制拓撲圖
自動化過程控制和運動控制是不同的
從關注點來說,自動化過程控制(這兒指伺服電機)首要關注的是控制單個電機的轉距、速度、方位中的一個或多個參數到達給定值。而運動控制首要關注點在于和諧多個電機,完結指定的運動(組成軌道、組成速度),比較著重軌道規劃、速度規劃、運動學轉化;比方數控機床里面要和諧XYZ軸電機,完結插補動作。
自動化過程控制常常作為運動控制系統的一個環節(一般是電流環,作業在力矩方式下),更著重于對電機的控制,一般包括方位控制、速度控制、轉矩控制三個控制環,一般沒有規劃的才能(有部分驅動器有簡單的方位和速度規劃才能)。

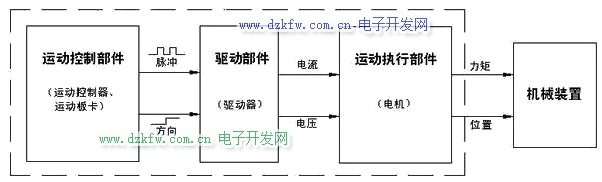
▲運動控制系統圖
· 運動控制器:常見的就是PLC
· 驅動器:工控人對驅動器應該再熟悉不過了
· 執行機構:伺服電機
· 減速機構:減速器
· 光柵:編碼器的一種;(一般用于車床加工)
· 人機界面:大家熟悉的觸摸屏。
運動控制系統其本質是控制電機,實現其對角位移,轉矩,轉速等物理量。一般針對某個產品,由機械、軟件、電氣等模塊組成,如精密數控機械、機床、機器人、無人機、運動平臺等等。運動控制主要針對某個產品的個體控制,它可以是某個系統內的某個設備。
簡單來說,就是由運動控制器發出命令,給驅動機構進行功率放大,將放大后的信號傳給執行機構(伺服電機),伺服電機自帶編碼器,能夠實現半閉環控制;伺服電機用傳動機構控制機械,在機械裝置上安裝了光柵尺(也是編碼器),實現全閉環控制。操作人員在現場可通過人機界面去進行整個環節的調試操作。
運動控制起源于早期的伺服控制。簡單地說,運動控制就是對機械運動部件的位置、速度等進行實時的控制管理,使其按照預期的運動軌跡和規定的運動參數進行運動。
早期的運動控制技術主要是伴隨著數控技術、機器人技術和工廠自動化技術的發展而發展的。早期的運動控制器實際上是可以獨立運行的專用的控制器,往往無需另外的處理器和操作系統支持,可以獨立完成運動控制功能、工藝技術要求的其他功能和人機交互功能。
這類控制器可以成為獨立運行的運動控制器。這類控制器主要針對專門的數控機械和其他自動化設備而設計,往往已根據應用行業的工藝要求設計了相關的功能,用戶只需要按照其協議要求編寫應用加工代碼文件,利用RS232或者DNC方式傳輸到控制器,控制器即可完成相關的動作。這類控制器往往不能離開其特定的工藝要求而跨行業應用,控制器的開放性僅僅依賴于控制器的加工代碼協議,用戶不能根據應用要求而重組自己的運動控制系統。
一個運動控制系統的根本架構組成包括
一個運動控制系統,通常由驅動器、控制器、傳感器三部分組成。
1、控制器:
1)PLC
PLC主要功能是對開關量進行邏輯控制,并有簡單的運動控制(直線軌跡控制)、運算數據處理等功能,通常采用觸摸屏作人機界面。為擴充其應用領域,各廠家為客戶提供了各種選配功能模塊,如多軸運動控制模塊、網絡通信模塊、模擬信號與數字信號轉換模塊等。PLC具有工作可靠、編程簡單等優點,但其運動控制功能相對簡單,若選用多軸運動控制模塊,則價格較高。
2)獨立式運動控制器
獨立式運動控制器配有顯示屏、按鍵和功能完善的控制指令,并有各種通信接口,控制電動機運動的能力比PLC強大。可完成直線插補、圓弧插補、軌跡控制等功能,且編程簡單。目前,國外的運動控制器都具有現場總線控制功能。
3)PCI總線型運動控制卡
由于PC機運算速度快、存儲量大,而且Windows操作系統的軟件資源豐富,采用VB、VC等軟件編寫用戶程序,功能十分強大。很多自動化設備都離不開PC機,特別是采用機器視覺檢測的自動化設備、需要運行AuoCAD等大型軟件的設備和需要采集存儲生產數據的設備等,因此,這些設備采用基于PC機的PCI總線型運動控制卡與PC機一起組成運動控制器。在所有的運動控制器中,運動控制卡的功能最強,但其工作的穩定性可靠性較差。
4)專用運動控制器
專用運動控制器是針對特定的設備專門設計的運動控制器,如繡花機控制器、縫紉機控制器噴繪機控制器等。專用運動控制器通常以單片機、ARM等芯片為核心設計,其集成度高、價格便宜、使用方便,軟件是為專用設備特殊設計的,客戶可直接使用。其硬件、軟件的設計都充分考慮了專用設備的工藝要求。
相對于專用運動控制器而言,PLC、獨立式運動控制器、運動控制卡被稱為通用運動控制器。
2、驅動器:
作為運動控制中的執行部件一般有電動式、 液壓式及氣動式三類。
電動式執行部件動作靈敏,性能優良,控制方便,且容易小型化,已經得到廣泛的應用。運動控制中最常用的伺服電機類型有:直流(DC)伺服電機、無刷直流伺服電機、交流(AC)伺服電機和步進電機。按執行電機功率的不同,伺服電機可分為:小功率隨動系統(100W以下)、中功率隨動系統(100~ -500 W)和大功率隨動系統(500W以上)。
每種電機都有相應的特點和驅動方式,詳見裕如:機器人常用電機介紹。
3、傳感器:
編碼器、力傳感器、壓力傳感器等。
如何選擇運動控制器?
1、根據要開發設備的工作特點,確定伺服電機的類型;
2、確定要控制的電機軸數和電機工作模式;
3、確定位置檢測、反饋模式,選擇是否采用光電編碼器或光柵尺或磁柵尺;
4、確定輸入輸出開關量的數量;
5、根據以上內容,選擇合適的運動控制器。
運動控制卡 知名品牌
國內:1.固高
2.雷賽
3.正運動
4.眾為興
5.研華
6.樂創
7.東莞博派智能科技
國外
1.PMAC(歐姆龍收購)
2.翠歐 (英國)
3.Aerotech (美國)
4.以色列ACS公司
5.美國ParkerHannifin公司
6.美國GALIL公司
7.美國科爾摩根(Kollmorgen)公司
8.瑞士瑞諾集團
9.美國Baldor公司
10.美國AEROTECH公司
11.美國國家儀器公司NI
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底