
永磁同步電機是交流驅動系統以永磁同步電機為驅動電機的設備,它以永磁體替代電勵磁電機的勵磁繞組。隨著新材料、機電一體化、電力電子、計算機、控制理論等各種相關新技術的快速發展,永磁同步電機控制系統已經開拓了很廣泛的應用領域,能夠實現高速、高精度、高穩定度、快速響應、高效節能的運動控制。

永磁同步電機概述永磁同步電機出現于20世紀50年代,它的運行原理與普通電激磁同步電機相同,但以永磁體激磁替代激磁繞組激磁使得電機結構簡單。永磁同步電機省略了普通同步電機所特有的集電環和電刷,提高了電機運行的可靠性。由永磁體激磁,無須激磁電流,因而提高了電機的效率和功率因數。
普通同步電機調節勵磁電流的大小可以人為地改變勵磁磁勢的大小。永磁同步電機以永磁體代替電勵磁繞組作為磁勢源,它對外提供的磁通‰和磁勢L隨著外磁路磁導和電樞反應磁場的變化而自動變化,無法直接調節永磁鐵磁勢的大小。永磁體作為磁路的一部分,由于磁鐵的磁導率低,對電樞反應磁場起削弱作用,使得永磁同步電機的直軸電樞反應電抗比交軸反應電抗小得多。
普遍認為永磁同步電機存在著無異步起動能力和重載時有振蕩失步的危險。永磁同步電機起動時,雖然定子繞組中通以交變電流并建立旋轉的定子磁場,旋轉的定子磁場在永磁體磁極中產生相互作用,由于其轉子慣性較大,使得電機無法獲得足夠的起動力矩。永磁同步電機以某一頻率旋轉時,負載的變化只是改變了定子磁場軸線與轉子磁極軸線的夾角,此時電機仍保持同步轉速旋轉,當定子磁場軸線與轉子磁極軸線的夾角增大并超過最大負載角,此時電機定子磁場與轉子永磁體問的磁力將無法維持負載平衡,使得轉子脫離同步轉速發生失步。
電機變頻調速技術為解決永磁同步電機異步起動和失步振蕩問題提供了解決辦法。永磁同步電機起動時,變頻器輸出較低頻率的電壓在電機中形成旋轉緩慢的定子磁場,隨著負載角的增大,電磁力矩也相應增大并克服轉子慣性使其旋轉。其轉速隨著變頻器頻率的升高而逐漸升高至某一轉速,完成起動過程。在變頻調速中對轉速和轉矩實行閉環控制,可隨時調節同步轉速,避免永磁同步電機出現失步現象。
有別于異步電機,同步電機只能通過調頻的方式進行調速。盡管電機轉速可與電源頻率保持同步,但對于車輛行駛工況中存在不確定負載擾動的場合,僅僅依靠外部裝置設置供電頻率的方式達不到電動汽車的性能要求。反饋電機轉速信息,由電機轉子軸上的位置傳感器發出的脈沖控制定子電壓頻率能夠獲得更好的效果。永磁同步電機能夠滿足電動汽車的驅動要求,在電動汽車的應用中越來越受到重視。
永磁同步電機伺服系統除電機外,系統主要包括驅動單元、位置控制系統、速度控制器、轉矩和電流控制器、位置反饋單元、電流反饋單元、通訊接口單元等。
1.永磁式交流同步伺服電機。永磁同步電機永磁式同步電機具有結構簡單、體積小、重量輕、損耗小、效率高的特點。和直流電機相比,它沒有直流電機的換向器和電刷等需要更多維護給應用帶來不便的缺點。相對異步電動機而言則比較簡單,定子電流和定子電阻損耗減小,且轉子參數可測、控制性能好,但存在最大轉矩受永磁體去磁約束,抗震能力差,高轉速受限制,功率較小,成本高和起動困難等缺點。與普通同步電動機相比,它省去了勵磁裝置,簡化了結構,提高了效率。永磁同步電機矢量控制系統能夠實現高精度、高動態性能、大范圍的調速或定位控制,因此永磁同步電機矢量控制系統引起了國內外學者的廣泛關注。
2.驅動單元。驅動單元采用三相全橋自控整流,三相正弦PWM電壓型逆變器變頻的AC-DC-AC結構。設有軟啟動電路和能耗泄放電路可避免上電時出現過大的瞬時電流以及電機制動時產生很高的泵升電壓。逆變部分采用集驅動電路,保護電路和功率開關于一體的智能功率模塊(IPM)。
3.控制單元。控制單元是整個交流伺服系統的核心, 實現系統位置控制、速度控制、轉矩和電流控制器。具有快速的數據處理能力的數字信號處理器(DSP)被廣泛應用于交流伺服系統,集成了豐富的用于電機控制的專用集成電路,如A/D轉換器、PWM發生器、定時計數器電路、異步通訊電路、CAN總線收發器以及高速的可編程靜態RAM和大容量的程序存儲器等。
4.位置控制系統。對于不同的信號,位置控制系統所表現出的特性是不同的。典型的輸入信號有三種形式:位置輸入(位置階躍輸入)、速度輸入(斜坡輸入)以及加速度輸入(拋物線輸入)。位置傳感器一般采用高分辨率的旋轉變壓器、光電編碼器、磁編碼器等元件。旋轉變壓器輸出兩相正交波形,能輸出轉子的絕對位置,但其解碼電路復雜,價格昂貴。磁編碼器是實現數字反饋控制性價比較高的器件,還可以依靠磁極變化檢測位置,目前正處于研究階段,其分辨率較低。
5.接口通訊單元。接口包括鍵盤/顯示、控制I/O接口、串行通信等。伺服單元內部及對外的I/O接口電路中,有許多數字信號需要隔離。這些數字信號代表的信息不同,更新速度也不同。
圖 永磁同步電機的內部電磁結構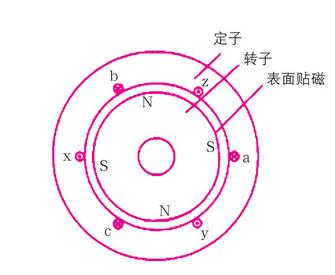
一臺永磁同步電機的內部電磁結構如圖所示,其中各相繞組的軸線方向也作為各相繞組磁鏈的正方向,電流的正方向也標在圖中,可以看出定子各相的正值電流產生各相的負值磁鏈,而定子繞組的電壓正方向為電動機慣例。在建立數學模型之前做如下的假設:忽略鐵心飽和;不計渦流和磁滯損耗;轉子上沒有阻尼繞組;永磁材料的電導率為0;相繞組中感應電動勢波形是正弦波。根據以上的假設和一系列的推導可得到永磁同步電機在d-q坐標系下的數學模型如下。
定子電壓方程:
 (1)
(1)
 (2)
(2)
定子磁連方程:
 (3)
(3)
 (4)
(4)
將方程(3)和(4)代入到方程(1)和(2),得到如下方程:
 (5)
(5)
 (6)
(6)
將(5)-(6)合并得到如下方程:
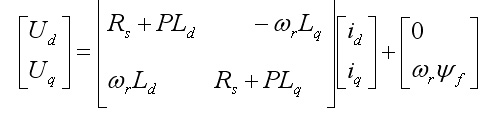 (7)
(7)
將(7)方程變化成適合在matlab/simulink環境下能搭建模型的方程,即。
 (8)
(8)
以上式子中:p-微分算子,rs-電驅繞組電阻,ωr-轉子角速度,ψf-永磁體產生的磁鏈,是常數,ld,la是d,q線圈的自感。
電磁轉矩方程:  (9)
(9)
電機轉子的機械運動方程為:  (10)
(10)
電機的轉子位置角度方程:  (11)
(11)
而式子中的p為轉子極對數;te為電磁轉矩;tl 為負載轉矩;j為轉子轉動慣量;b為阻尼系數。
矢量控制和直接轉矩控制是永磁同步電機兩種典型的控制策略。
一、永磁同步電機矢量控制
永磁同步電機矢量控制方法主要有:id=0控制、COSψ=1控制、恒磁鏈控制、最大轉矩/電流控制、弱磁控制、最大輸出功率控制等,其中,id=0控制方式最簡單,COSψ=1控制則可以降低與電機匹配的變頻器容量,而恒磁鏈控制可以增大電動機的最大輸出轉矩。
二、永磁同步電機的直接轉矩控制
直接轉矩控制放棄了矢量控制的解耦思想,采取定子磁鏈定向.利用離散的兩點式(Ban&Band)進行調節,直接對電機的磁鏈和轉矩進行控制,使電機轉矩響應迅速。
1996年,英國的French等Ll”發喪了關于永磁同步電機直接轉矩控制的淪文,1997年.由澳大利亞的Zhong、Rahman教授和南京航空航天大學的胡育文教授合作提出了基于永磁同步電機的直接轉矩控制方案,初步解決r直接轉矩控制應用于水磁同步電機的理論基礎。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底